%YAML:1.0
# Camera Parameters. Adjust them!
# Camera calibration parameters camera back
Camera.Iw: 754
Camera.Ih: 480
# hyperparameters
Camera.nrpol: 5
Camera.nrinvpol: 12
# forward polynomial f(rho)
Camera.a0: -209.200757992065
Camera.a1: 0.0
Camera.a2: 0.00213741670953883
Camera.a3: -4.2203617319086e-06
Camera.a4: 1.77146086919594e-08
# backward polynomial rho(theta)
Camera.pol0: 293.667187375663
Camera.pol1: 149.982043337335
Camera.pol2: -10.448650568161
Camera.pol3: 28.2295300683376
Camera.pol4: 7.13365723186292
Camera.pol5: 0.056303218962532
Camera.pol6: 10.4144677485333
Camera.pol7: 0.166354960773665
Camera.pol8: -5.86858687381081
Camera.pol9: 1.18165998645705
Camera.pol10: 3.1108311354746
Camera.pol11: 0.810799620714366
# affine matrix
Camera.c: 0.999626131079017
Camera.d: -0.0034775192597376
Camera.e: 0.00385134991673147
# principal point
Camera.u0: 392.219508388648
Camera.v0: 243.494438476351
# create a mirror mask for fisheye cameras
Camera.mirrorMask: 1
以上是multicol-SLAM的相机内参,forward polynomial f(rho) 和backward polynomial rho(theta) 分别代表的物理意义是什么?以及仿射变换矩阵affine matrix在这里的作用是什么?
对于同样具有鱼眼相机的openvslam系统,其鱼眼相机的配置文件:
Camera.name: "TUM VI monocular"
Camera.setup: "monocular"
Camera.model: "fisheye"
Camera.fx: 190.97847715128717
Camera.fy: 190.9733070521226
Camera.cx: 254.93170605935475
Camera.cy: 256.8974428996504
Camera.k1: 0.0034823894022493434
Camera.k2: 0.0007150348452162257
Camera.k3: -0.0020532361418706202
Camera.k4: 0.00020293673591811182
Camera.fps: 20
Camera.cols: 512
Camera.rows: 512
Camera.color_order: "Gray"
参数就非常的简洁,且很明了,k1-k4代表相机的径向畸变参数(无切向畸变),那么对于multiCol-SLAM,他的参数我就不那么懂了,尤其是
Camera.a0: -209.200757992065
Camera.a1: 0.0
Camera.a2: 0.00213741670953883
Camera.a3: -4.2203617319086e-06
Camera.a4: 1.77146086919594e-08
Camera.pol0: 293.667187375663
Camera.pol1: 149.982043337335
Camera.pol2: -10.448650568161
Camera.pol3: 28.2295300683376
Camera.pol4: 7.13365723186292
Camera.pol5: 0.056303218962532
Camera.pol6: 10.4144677485333
Camera.pol7: 0.166354960773665
Camera.pol8: -5.86858687381081
Camera.pol9: 1.18165998645705
Camera.pol10: 3.1108311354746
Camera.pol11: 0.810799620714366
分别代表的是什么?希望得到大神的解答,不胜感激。
自己的理解
经过很久的论文阅读,对multiCol-SLAM的鱼眼相机模型由了一定的理解,记录下来以备查验,也希望有人能指正和指教。
-
标定工具 (google:Scaramuzza_OCamCalib_v3.0_win)
-
两篇重要的论文(https://download.csdn.net/download/ouyangandy/12545885)
-
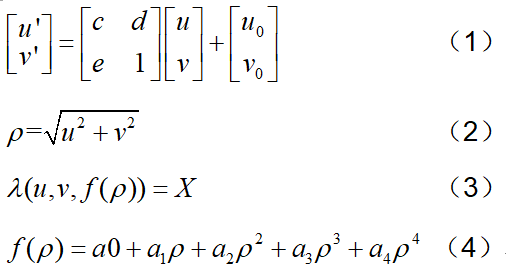
标定的各项参数的用处,不会使用md编辑公式,在word中编辑后插入这里:
-
对应上述公式的代码
void cam2world(double point3D[3], double point2D[2], struct ocam_model* myocam_model)
{
double *pol = myocam_model->pol;
double xc = myocam_model->xc;
double yc = myocam_model->yc;
double c = myocam_model->c;
double d = myocam_model->d;
double e = myocam_model->e;
int length_pol = myocam_model->length_invpol;
double invdet = 1 / (c - d*e);// 1/det(A), A = [c,d;e,1] 行列式的值
/*
[m.x [c d * [ut + [u0
m.y] = e 1] vt] v0] //其中ut,vt为sensor plane,m.x m.y为image plane
*/
double xp = invdet*((point2D[0] - xc) - d*(point2D[1] - yc)); //xp和yp 为sensor plane coordinate
double yp = invdet*(-e*(point2D[0] - xc) + c*(point2D[1] - yc));//
double r = sqrt(xp*xp + yp*yp); //ρ= √u^2+v^2
double zp = pol[0];
double r_i = 1;
//霍纳法则 : f(ρ)=a0 + a1*ρ + a2*ρ^2 + a3*ρ^3 + a4*ρ^4
for (int i = 1; i < length_pol; i++)
{
r_i *= r;
zp += r_i*pol[i];
}
double invnorm = 1 / sqrt(xp*xp + yp*yp + zp*zp);
point3D[0] = invnorm*xp;
point3D[1] = invnorm*yp;
point3D[2] = invnorm*zp;
};
也就是从point2D到point3D的mapping过程,也就是说,从鱼眼相机的image plane 转换到sensor plane,然后再转换到Normalized sphere,因此上面参数中的a0-a4也就是多项式(4)的参数。
反过来,对于一个三维点,对应到image plane上的点,也就有:
void world2cam(double point2D[2], double point3D[3], struct ocam_model* myocam_model)
{
double *invpol = myocam_model->inv_pol;
double xc = myocam_model->xc;
double yc = myocam_model->yc;
double c = myocam_model->c;
double d = myocam_model->d;
double e = myocam_model->e;
int width = myocam_model->width;
int height = myocam_model->height;
int length_invpol = myocam_model->length_invpol;
double norm = sqrt(point3D[0] * point3D[0] + point3D[1] * point3D[1]); // x^2+y^2
double theta = atan(point3D[2] / norm); //z/(x^2+y^2)
double t, t_i;
double rho, x, y;
double invnorm;
int i;
if (norm != 0)
{
invnorm = 1 / norm;
t = theta;
rho = invpol[0];
t_i = 1;
for (i = 1; i < length_invpol; i++)
{
t_i *= t;
rho += t_i*invpol[i];
}
x = point3D[0] * invnorm*rho;
y = point3D[1] * invnorm*rho;
point2D[0] = x*c + y*d + xc;
point2D[1] = x*e + y + yc;
}
else
{
point2D[0] = xc;
point2D[1] = yc;
}
};
最后
以上就是清爽咖啡最近收集整理的关于MultiCol-SLAM鱼眼相机的相机模型的全部内容,更多相关MultiCol-SLAM鱼眼相机内容请搜索靠谱客的其他文章。
本图文内容来源于网友提供,作为学习参考使用,或来自网络收集整理,版权属于原作者所有。


![【鱼眼镜头4】[鱼眼畸变模型]:四阶多项式模型1 概述2 基于畸变直线斜率计算的校正算法具体过程实验结果与分析鱼眼镜头参考文献](https://www.shuijiaxian.com/files_image/reation/bcimg16.png)





发表评论 取消回复