![]() 本文目的:
本文目的:
为了用于前碰撞预警,实时监测车辆与前方障碍物之间的距离。机器视觉测距具有价格低廉、信息量大的优点。
其中,分为双目视觉测距和单目视觉测距。双目视觉测距是基于三角测量的方法,模仿人类利用双目视觉差感知距离,但在处理过程中需要进行图像匹配,对硬件和算法要求高。单目视觉测距具有结构简单、成本低的优点,节省了图像匹配工作。
![]() 本文工作方法及内容:
本文工作方法及内容:
该作者根据投影变换模型推导出单目测距算法,基于PreScan平台进行虚拟试验,分析图像传感器各参数对测距精度的影响,验证单目测距方法的有效性和准确度。
![]() 投影变换模型和车距测量方法介绍
投影变换模型和车距测量方法介绍
根据小孔成像原理,假设摄像头在坐标G点,在水平地面的投影为O点,汽车前进方向为X轴方向,假设障碍物在(X1,Y1)点,则有如图所示数学模型:
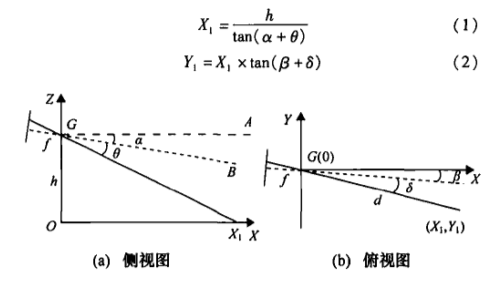
第二步在一个图像中,分辨率为I*J;障碍物在图中的(U1,V1);在图像中我们是知道障碍物的坐标(U1,V1)是多少的,而且很实际位置来说,有着这样的关系:
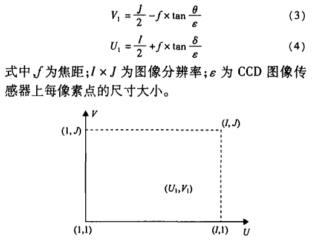
所以我们可以得到实际位置中的角度如下数学公式所示:
知道角度后,且我们有固定的摄像头的高度h,所以根据(1)(2)式我们可以得到障碍物相对于摄像头的位置X和Y,而且还可以求出来直线距离d:

- 最后一步:因为我们传感器的位置不在车头,所以直线距离还要减去车头,得到真实车距。
![]() 基于PreScan的虚拟试验平台搭建
基于PreScan的虚拟试验平台搭建
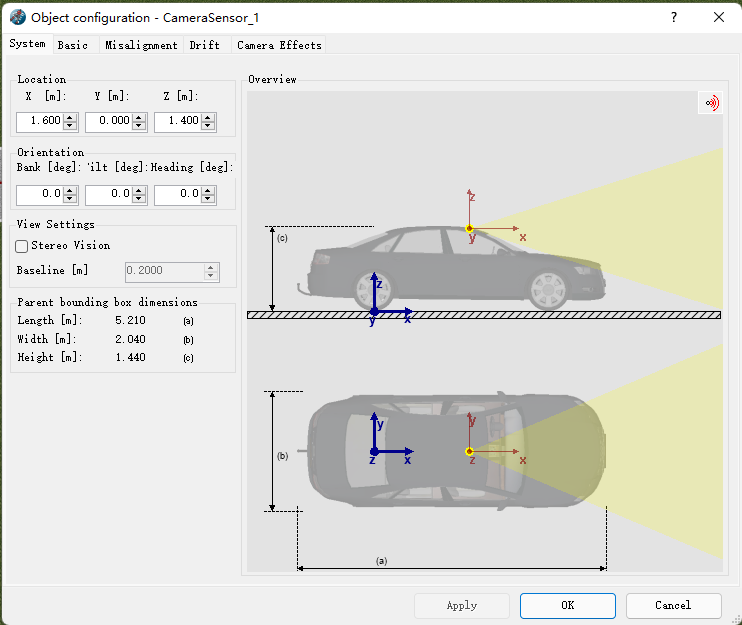
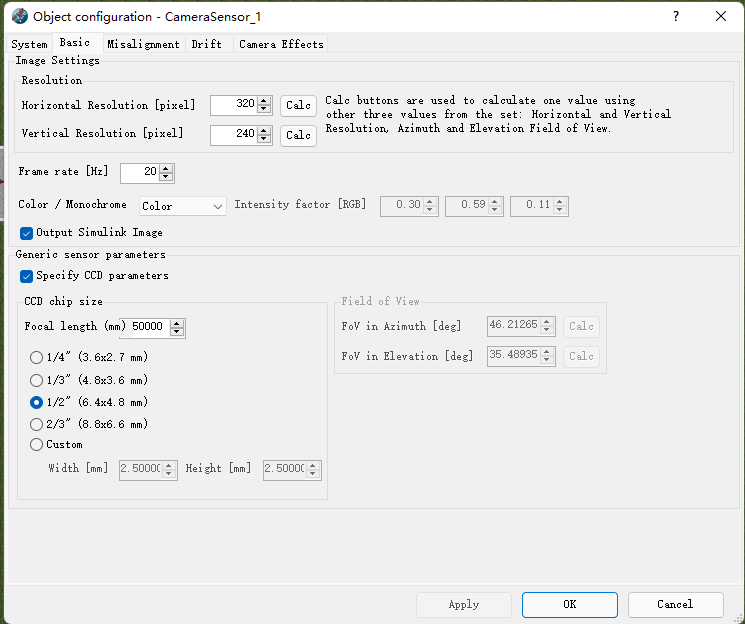
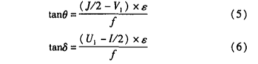
其中含有摄像头焦距位置等信息,然后拍摄结果如图:分别是90m 75m 60m 45m 30m 15m 的图片

90m

75m

60m

45m

30m

15m
![]() 虚拟实验与误差分析
虚拟实验与误差分析
根据图像传感安装高度、采集图像分辨、镜头俯仰角的不同,共采集4组图像。分别为:
- 第一组实验:标准组:设定传感器高度为1.4m,镜头俯仰角为0°,图像分辨率为640X480;
- 第二组实验:将传感器高度改为1.35m;
- 第三组实验:图像分辨率改为1280X960;
- 第四组将镜头俯仰角改为2°,光轴和地面相交。
经过图片处理程序后,有以下结果:
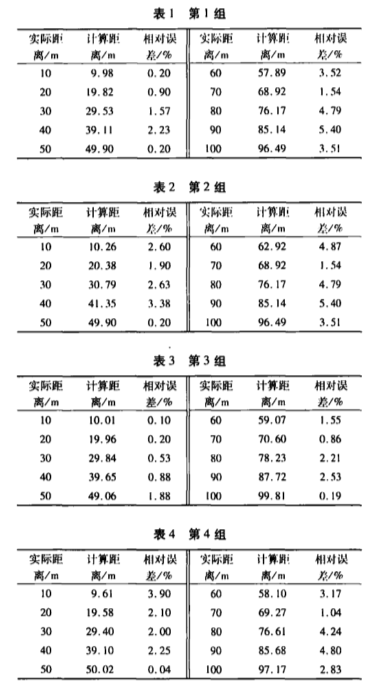
结果分析:第1组实验中,60m以内测距相对误差数值均在3%以下,说明单目测距在近距离内具有较好的精度;随着距离的增加,相对误差明显增大。误差主要由分辨率造成,本文测距程序的功能是完成从某一像素到对应距离的转换,但是在图像传感器成像时,将连续的路面转换为离散的像素,每一段距离对应一个像素,所以计算距离对应的是一个距离区间,即障碍物出现在某一距离区间内,使用测距程序会得出相同的距离,距离区间的增加会导致误差的增加,因此提高传感器分辨率可以降低此项误差。
第二组实验相对误差有所增加,对比标准组,试验数据偏大,说明图像传感器高度降低使得计算车距值偏大。从理论模型分析,考虑式(l)可知,计算车距图像传感器安装高度成正比,实际安装高度偏小,按安装高度计算得出的车距偏大,与实际情况吻合。当距离增加后,两组数据差异减小,直至相同,说明远距离误差主要由分辨率导致。
第3组试验对比标准组,相对误差明显降低,大部分相对误差降低至标准组的一半以下。从理论分析可知,分辨率提高一倍(640像素×480像素提升至128像素×960像素),系统误差减小一半,与试验结果大致吻合,证明提高分辨率可以有效降低误差。
由于图像传感器俯仰角对测距精度影响较大,以第4组试验需要以车道线平行的约束条件来求解仰角。根据几何知识,三维空间两平行直线在二维
平面交于一点,即消隐点。当车辆在道路中央沿直线行驶且摄像头主光轴水平时(俯仰角为0°),消隐点应在图像正中央。图像传感器俯仰角校正如图5所示当俯仰角变化时,消隐点的位置会上下移动,移动幅度与镜头俯仰角正相关。利用此原理,首先通过Hough变换求解左右两侧车道线方程,得:
U1=1.22 x v1+6, u2=-1.22 x v2 +635
求解两条直线交点(消隐点)为(320.5,258),将消隐点坐标代入式(10):
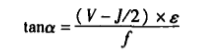
得tana=0.0348,a=1.99°,与实际俯仰角2°接近。将俯仰角正切值代入式(7)可得出校正后的计算车距。编写校正程序并重新进行测距试验。测距结果表明,在校正良好的情况下,单目视觉测距有着较高的精度。
最后
以上就是温婉口红最近收集整理的关于基于PreScan平台的单目视觉测距方法研究与虚拟试验的全部内容,更多相关基于PreScan平台内容请搜索靠谱客的其他文章。





![【鱼眼镜头4】[鱼眼畸变模型]:四阶多项式模型1 概述2 基于畸变直线斜率计算的校正算法具体过程实验结果与分析鱼眼镜头参考文献](https://www.shuijiaxian.com/files_image/reation/bcimg16.png)


发表评论 取消回复