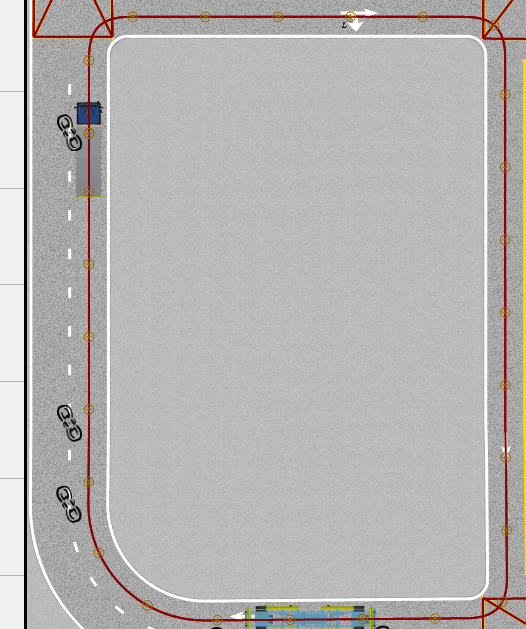
1. 在prescan的道路中使用 inherited path definition 画一段封闭的道路
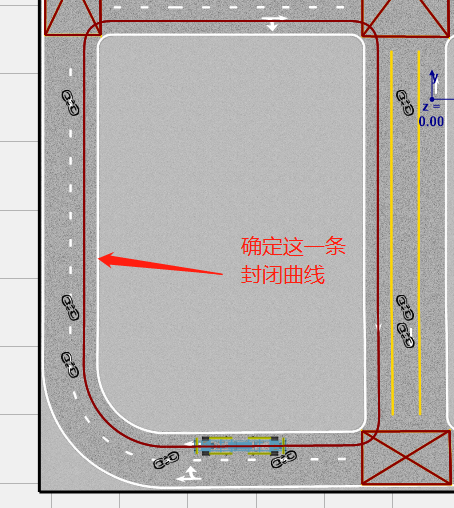
2. 添加一个辆障碍车辆,并放到该封闭曲线上
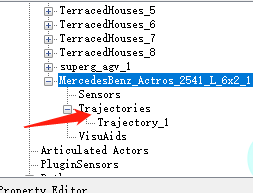
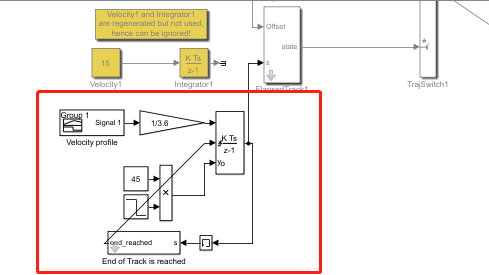
3. 打开车辆对应的轨迹
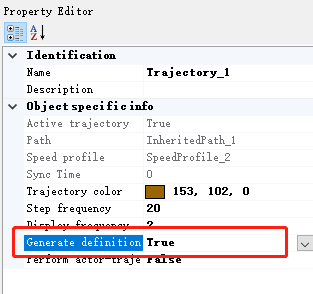
4. 将false改为true
5. 编译通过,并在simulink中打开模型,路径
C:UsersPublicDocumentsExperimentsDemoExperimentsDemo_TrafficLooping
6. 修改名字
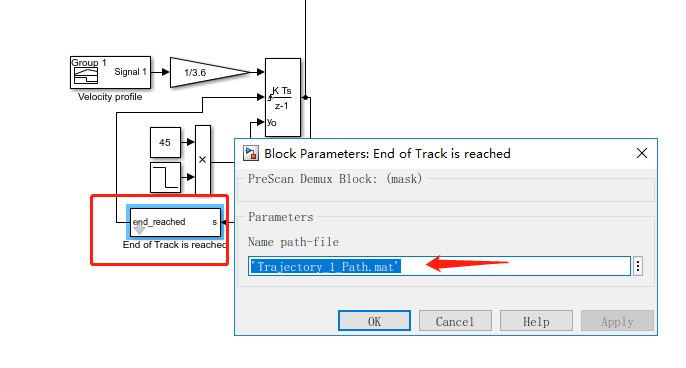
这个名字和上面的路径的名字一致,在结尾添加_path
最后
以上就是坦率大船最近收集整理的关于Prescan(六):prescan设置不停绕圈的障碍车的全部内容,更多相关Prescan(六):prescan设置不停绕圈内容请搜索靠谱客的其他文章。
本图文内容来源于网友提供,作为学习参考使用,或来自网络收集整理,版权属于原作者所有。

![【鱼眼镜头4】[鱼眼畸变模型]:四阶多项式模型1 概述2 基于畸变直线斜率计算的校正算法具体过程实验结果与分析鱼眼镜头参考文献](https://www.shuijiaxian.com/files_image/reation/bcimg16.png)






发表评论 取消回复