 让我们来看一下如何自定义相机参数吧!
目 录
让我们来看一下如何自定义相机参数吧!
目 录
第一部分:生成相机参数文件
方法一:使用相机参数模板
- 方法二:在Pix4Dmapper中生成相机参数文件
第一部分
生成相机参数文件
我们这里所指的相机参数文件,是XML格式的文本文件,定义了相机的各种参数如焦距、传感器尺寸、镜头畸变等。 如果这些参数已知,您可以使用相机参数模板,生成XML文件,参照方法一。 如果这些参数未知,您可以使用Pix4Dmapper处理一组数据,Pix4Dmapper会自动校准相机参数,获得优化的内方位元素,参照方法二。 方法一:使用相机参数模板 以下分别是透视相机和鱼眼相机的相机参数文件示例,以及相应的说明。 透视镜头19
5472
3648
2.4
6.54
4.348008
perspective
10.633008
0.033
-0.209
0.315
0
0
鱼眼镜头19
4384
3288
3.085
2.31375
fisheye
1
-0.00643155
-0.127019
-0.017398
3853
6.74
6.74
3853
字段说明
标签 Camera,属性 name
字符串格式为:
___x
这些信息可从影像的Exif中得到。
如Exif中未定义镜头型号 (即lens-model), 则字符串格式为: _x
标签 imageWidth, imageHeight
影像的宽度/高度(以像素为单位)
标签 pixelSize
像素大小(以微米为单位)
标签 pixelSize
像素大小(以微米为单位)
标签 principalPointXmm, principalPointYmm
像主点X/Y(以毫米为单位)
标签 LensType
透视或鱼眼镜头
标签 focalLengthmm
焦距(以毫米为单位,仅透视镜头)
标签 radialK1, radialK2, radialK3, tangentialT1, tangentialT2
径向和切向畸变系数(仅透视镜头)
标签 poly1, ..., poly4
多项式系数(仅鱼眼镜头)
标签 c, d, e, f
仿射变换参数(仅鱼眼镜头)
标签 bandConfig
波段列表
标签 band,属性name
波段名称 (以下之一: “Red”, “Green”, “Blue”, “NIR”, “Alpha”, “Gray”, “Red edge”, “Thermal IR”, “LWIR”, “Garbage”, “Unknown”)
标签 band,属性centralWaveLength
某波段的中心波长(以纳米为单位)
标签 band,属性width
带宽(以纳米为单位;如果未指定,则为0)
方法二 从Pix4Dmapper中生成相机参数文件 在本方法中,您会使用Pix4Dmapper处理一组数据,Pix4Dmapper会自动对相机的内方位元素进行优化。 数据要求 • 合适的影像数量,通常50张以上,150张以下就足够了。 • 非平面场景,即场景中的物体高度非一致。 • 具有足够的影像重叠率,丰富的纹理。 • 如果可能,请使用地面控制点校准步骤
1. 新建工程,导入影像,控制点等信息。
2. 编辑相机型号。 • 设置传感器宽度和传感器高度,或像素大小 • 设置相机焦距 • 设置相机中心点x和相机中心点y,分别为1/2的图像宽度和高度 • 透视镜头:“带畸变的相机型号”设置为5 • 透视镜头:径向畸变R1, R2, R3都设置为0 • 透视镜头:切向畸变T1, T2都设置为0 • 鱼眼镜头:设置“多项式系数”的形式为“0-1-x-x-x” • 鱼眼镜头:勾选“带对称仿射变换的相机型号“。 • 鱼眼镜头:仿射变换C = 图像宽度,仿射变换D=0,仿射变换E=0,仿射变换F = 图像宽度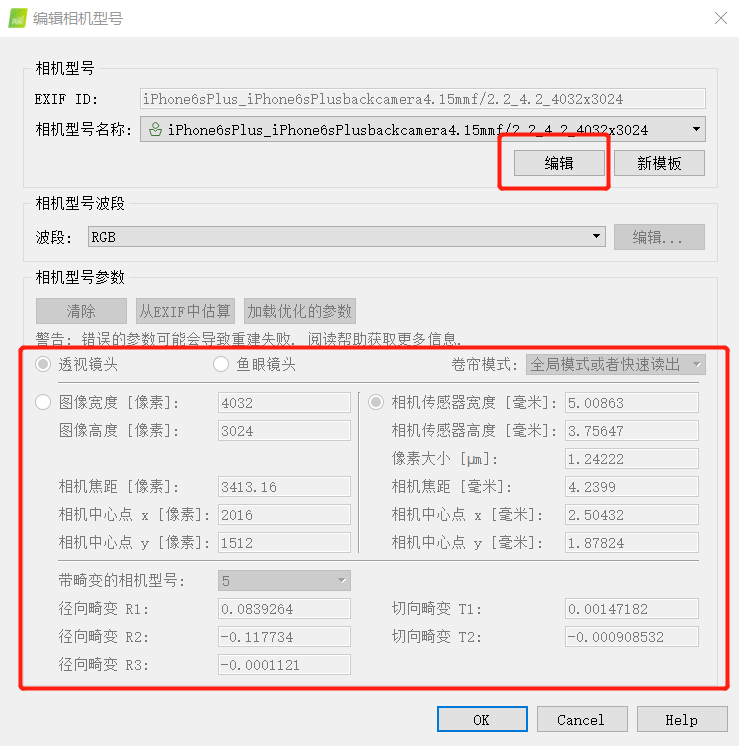
3. 运行“1.初始化处理”。
4. (可选)如果有地面控制点,进行刺点,刺点完成后运行“重新优化”。
5. 通过以下方法评估建模质量 • 查看质量报告 • 在空三射线编辑器中,在不同位置挑选一些连接点,验证它们在原始影像中的重投影。• 在空三射线编辑器中,验证地面控制点在原始影像中的重投影。
6. 如果建模质量不够好,请添加一些手工连接点。
7. 确认建模质量足够好之后,我们要把相机参数保存到数据库中: • 回到“编辑相机型号“界面,点击”加载优化的参数“。 • 设置”相机中心点x“和“相机中心点y”,分别为1/2的图像宽度和高度。• 最后点击窗口上方的保存。
8. 删除手工连接点(如有),重新运行“1.初始化处理”。
9. 评估建模质量(方法如前)。
10. 如果建模质量不够好,请重复步骤6-9。 11. 导出相机参数文件。 • 在Pix4Dmapper中,依此点击“帮助”,“配置”。 • 在“相机数据库”选项卡中,找到“用户自定义相机数据库”,点击“导出”。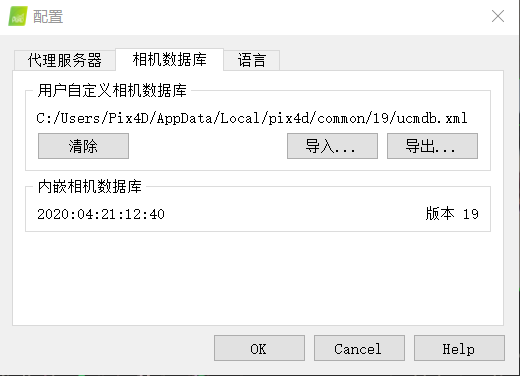 △ 导出相机数据库
△ 导出相机数据库
第二部分
从Pix4Dreact中导入相机参数文件
这一部分的操作就相对简单直白了: 1. 在Pix4Dreact的开始面板中,打开右上角的设置图标,单击Camera parameters file。 2. 单击Select files,选择你的.xml文件。 3. 退出设置。打开或新建一个工程,开始处理数据。软件会自动使用您刚刚导入的相机参数文件。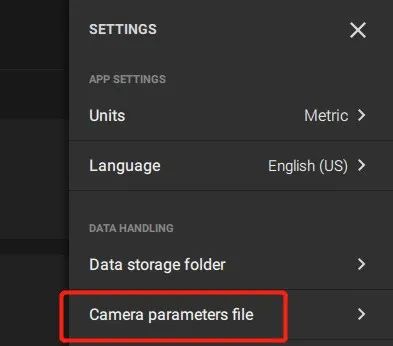
△ 在Pix4Dreact中导入相机参数文件
如果不想要使用某一个相机参数文件,您可以单击Remove以取消关联。 如果您为某个相机导入了相机参数文件,则其值将覆盖影像的Exif数据或内部相机库中的任何相应值。 至此,您就可以使用Pix4Dreact处理本来不支持的影像了!
文章授权转载于Pix4D
Pix4D自动生成DTM和等高线(可下载)
45分钟!超详细的PIX4D航测内业处理流程
Pix4D航测成图完整教程(空三,点云编辑DSM,正射,质量报告分析...)
CC(Smart3D) Pix4D PhotoScan 基础入门教程全面汇总(附文档教程下载)

最后
以上就是潇洒发夹最近收集整理的关于地面控制点的定义与作用_学会这篇,突破相机限制!Pix4D中随意自定义相机参数...的全部内容,更多相关地面控制点内容请搜索靠谱客的其他文章。






![【鱼眼镜头4】[鱼眼畸变模型]:四阶多项式模型1 概述2 基于畸变直线斜率计算的校正算法具体过程实验结果与分析鱼眼镜头参考文献](https://www.shuijiaxian.com/files_image/reation/bcimg16.png)

发表评论 取消回复