????????????????????????欢迎来到本博客❤️❤️❤️????????????
????博主优势:????????????博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
目录
????1 概述
????2 运行结果
????3 参考文献
????????4 Matlab代码实现
????1 概述
机器人是当今重要研究领域之一,可以执行许多人类无法完成的任务,包括采矿、军事、救援、太空等方面。在这些应用中,移动机器人的导航主要取决于其智能程度,而路径规划是最有效、最重要的智能功能。路径规划的目的是基于路径长度、行走时间、能耗等特定的优化标准,在给定工作环境中寻找一条从起点到目标点的安全无碰撞路径。
????2 运行结果
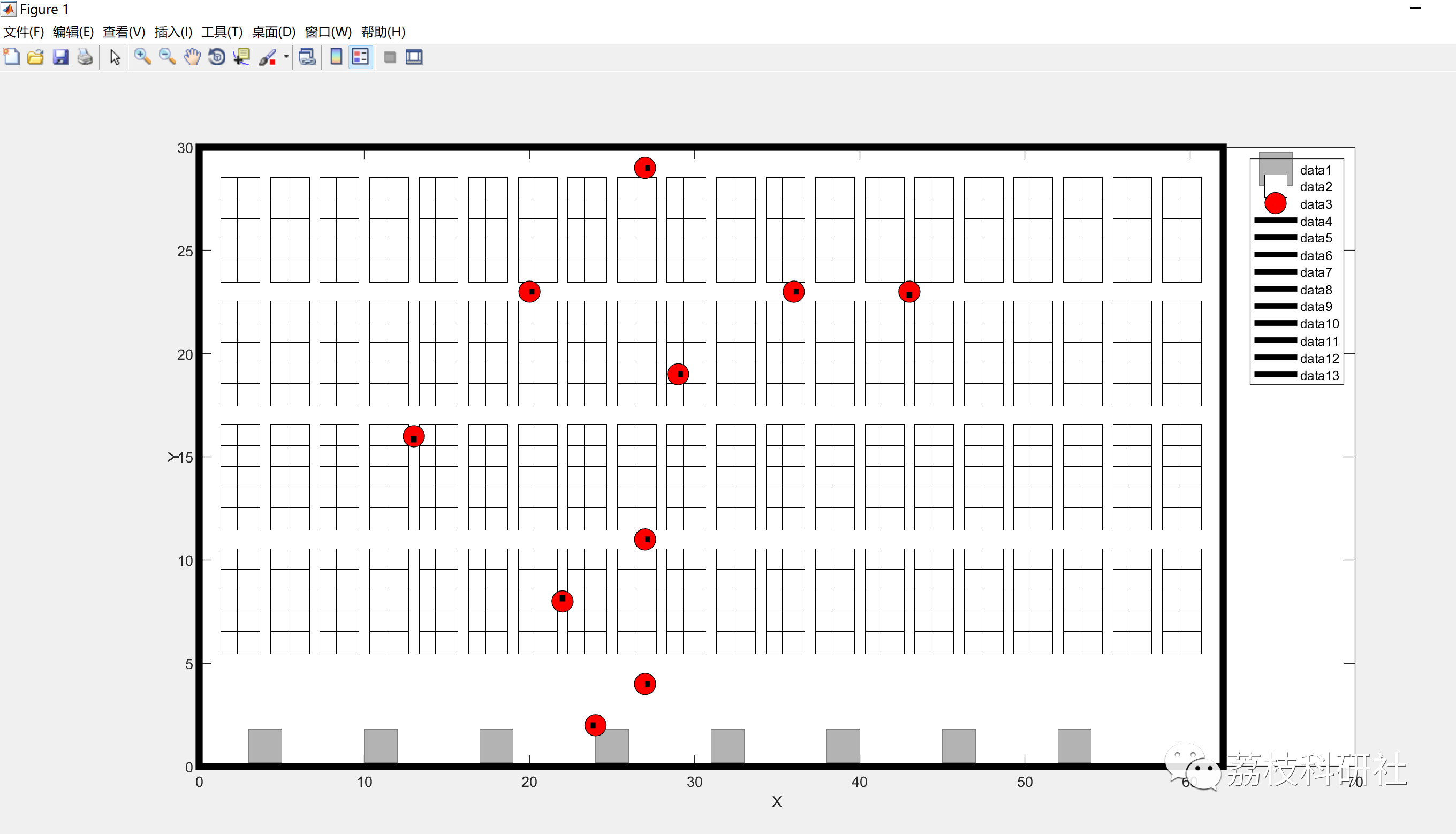
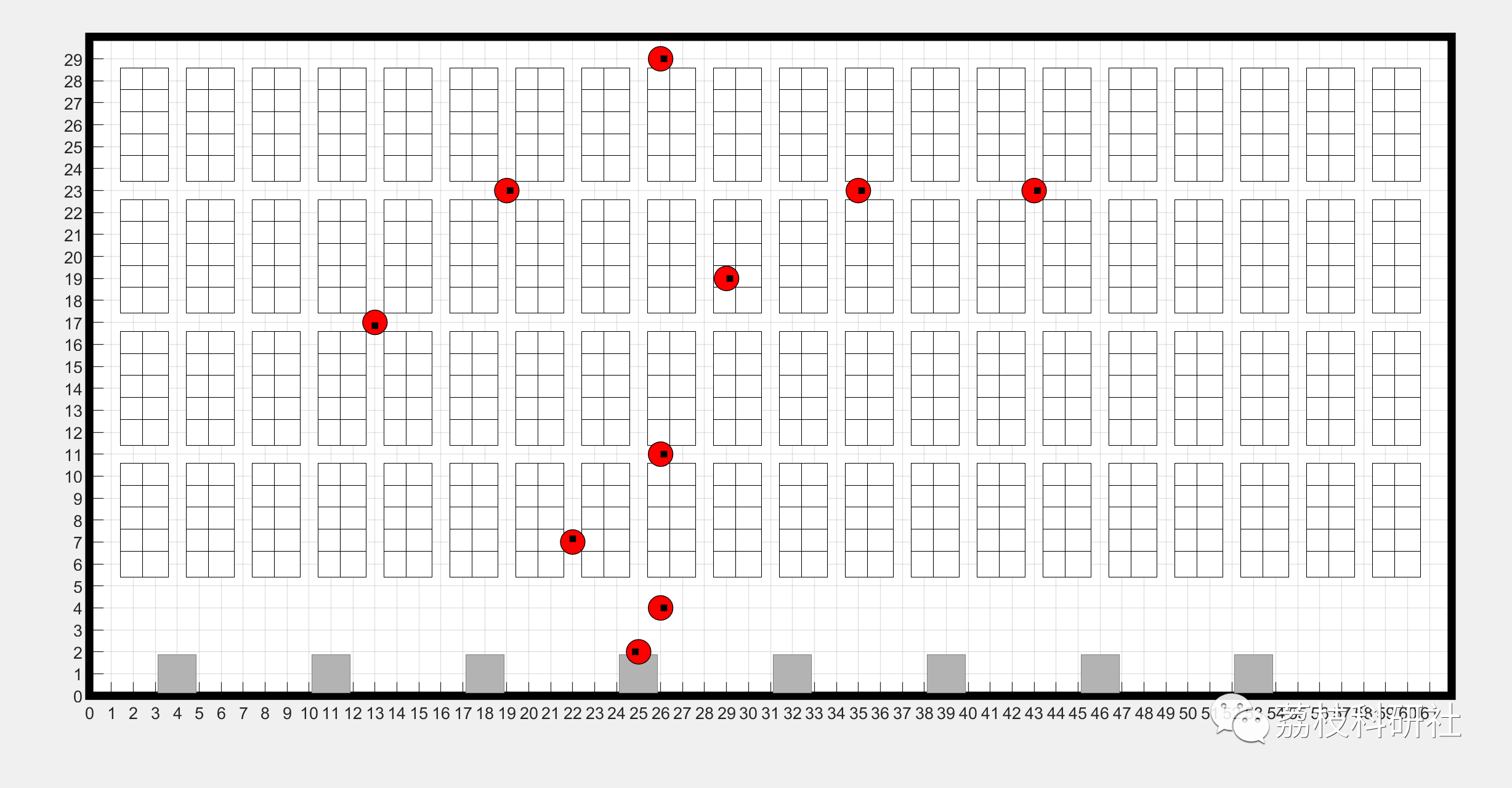
部分代码:
function plotAll(RobotStates,PodStates,DepotStates)
xlength=61;
ylength=29;
rectangle('Position', [0,0,xlength+1,ylength+1],'lineWidth',5);
plot(DepotStates(:,1),DepotStates(:,2),'square','MarkerEdgeColor',[0.5 0.5 0.5],'MarkerFaceColor',[0.7 0.7 0.7],'MarkerSize',30);
plot(PodStates(:,1),PodStates(:,2),'square','MarkerEdgeColor','k','MarkerFaceColor',[1 1 1],'MarkerSize',20);
plot(RobotStates(:,1),RobotStates(:,2),'o','MarkerEdgeColor','k','MarkerFaceColor',[1 0 0],'MarkerSize',15);
%draw robot direction
for i=1:size(RobotStates,1)
temp = 0.3;
x=RobotStates(i,1);
y=RobotStates(i,2);
a=RobotStates(i,3);
switch a
case 1
xx = x+temp;
yy = y;
case 2
xx = x;
yy = y+temp;
case 3
xx = x-temp;
yy = y;
case 4
xx = x;
yy = y-temp;
end
line([x,xx],[y,yy],'color','k','linestyle','-','lineWidth',4);
end
end
????3 参考文献
[1]杨恒,李越,孙寒挺,李卓.路径最优的移动机器人路径规划研究[J].机械设计,2022,39(08):58-67.DOI:10.13841/j.cnki.jxsj.2022.08.027
????????4 Matlab代码实现
最后
以上就是灵巧柠檬最近收集整理的关于基于类似Kiva的移动机器人的路径规划(Matlab代码实现)的全部内容,更多相关基于类似Kiva内容请搜索靠谱客的其他文章。








发表评论 取消回复