⛄一、简介
路径规划是实现移动机器人自主导航的关键技术,是指在有障碍物的环境中,按照一定的评价标准(如距离、时间、能耗等),寻找到一条从起始点到目标点的无碰撞路径,这里选取最短距离路径规划的评价标准,即最短路径规划问题。
1.路径规划数学模型的建立
将移动机器人周围环境用一组数据进行抽象表达,建立二维或三维的环境模型,得到移动机器人能够理解分析的环境数据,是机器人路径规划的基本前提。我这里用的是栅格法,其原理是将周围环境看成一个二维平面,将平面分成一个个等面积大小的具有二值信息的栅格,每个栅格中存储着周围环境信息量,下图我给出了一个栅格法地图,方便大家更好的理解栅格地图。这里设计的栅格地图为一个20×20的地形矩阵,黑色的地方表示有障碍,白色的地方表示没有障碍。
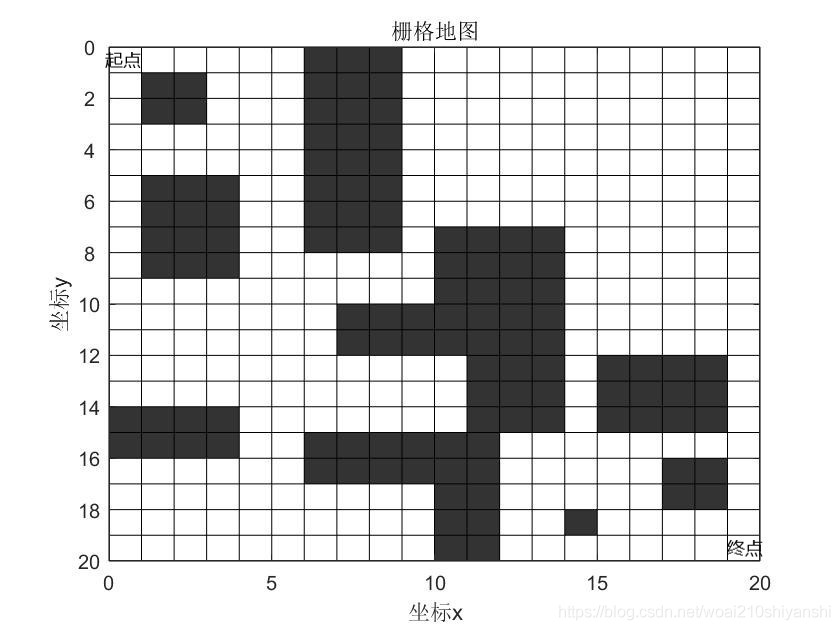
图1 栅格法地图
在用栅格法建立环境模型时,为了将环境信息转换成移动机器人可以识别的数据,一般采用序号法标记环境地图信息,即将栅格地图中一个个栅格从序号1依次累加直到标记到最后一个栅格。如图2所示。
最后
以上就是悲凉宝贝最近收集整理的关于【路径规划】蚁群算法机器人栅格地图最短路径规划【含Matlab源码 1580期】的全部内容,更多相关【路径规划】蚁群算法机器人栅格地图最短路径规划【含Matlab源码内容请搜索靠谱客的其他文章。
本图文内容来源于网友提供,作为学习参考使用,或来自网络收集整理,版权属于原作者所有。








发表评论 取消回复