开始文章之前,我们需要注意一点
稳定的系统才有稳态误差可言,所以我们去求稳态误差的第一件事就是确保系统是稳定的
有差无差系统以及稳态误差的概述
无差系统:在单位阶跃的输入条件下,如果没有原理性误差,则为无差系统
有差系统:在单位阶跃的输入条件下,如果有原理性误差,则为有差系统
有差无差强调是在单位阶跃的条件下,因为输入变了可能误差也就变了
我们这里说的稳态误差只考虑原理性误差,不考虑非线性因素引起的误差
误差的两种定义方式
1.输入定义 :在输入和反馈的汇入点后得到的是误差
2.输出定义:比较点后移到反馈传递函数后面得到
详细见下图,我们一般都是输入定义的稳态误差
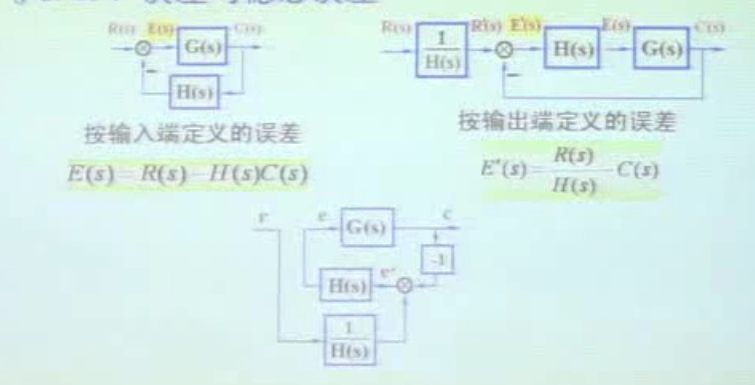
输入定义的稳态误差,就是R(S)-H(S)*C(S),很容易理解,输入减去反馈
稳态误差的两种定义以及解体步骤
稳态误差
1.ess = lim(t->∞) e(t) 这是常用的定义方式 静态误差
2.ess = e(t) 中的稳态分量, 动态误差
下面会先说静态误差,再说动态。
一般解法
步骤:
1.判断系统稳定性,确定稳定后再计算(一般问你稳态误差都是稳定的了,不需要疑神疑鬼)
2.求误差传递函数 φr 和 φn (即输入-误差的传递函数和 扰动-误差的传递函数)
3.利用终值定理解出答案 ess = lim(s->0){ φr( s ) R ( s ) + φn ( s ) N ( s )}
注意点:
1.求误差传递函数一定要注意:
从输入(扰动) 到误差(输入定义,即输入和反馈的比较点后的输出为误差)
才是这个结构图的前向通道,我们需要重构结构图
比如下面这道题,E(s)/R(s) 的结构图实际上应该是 :
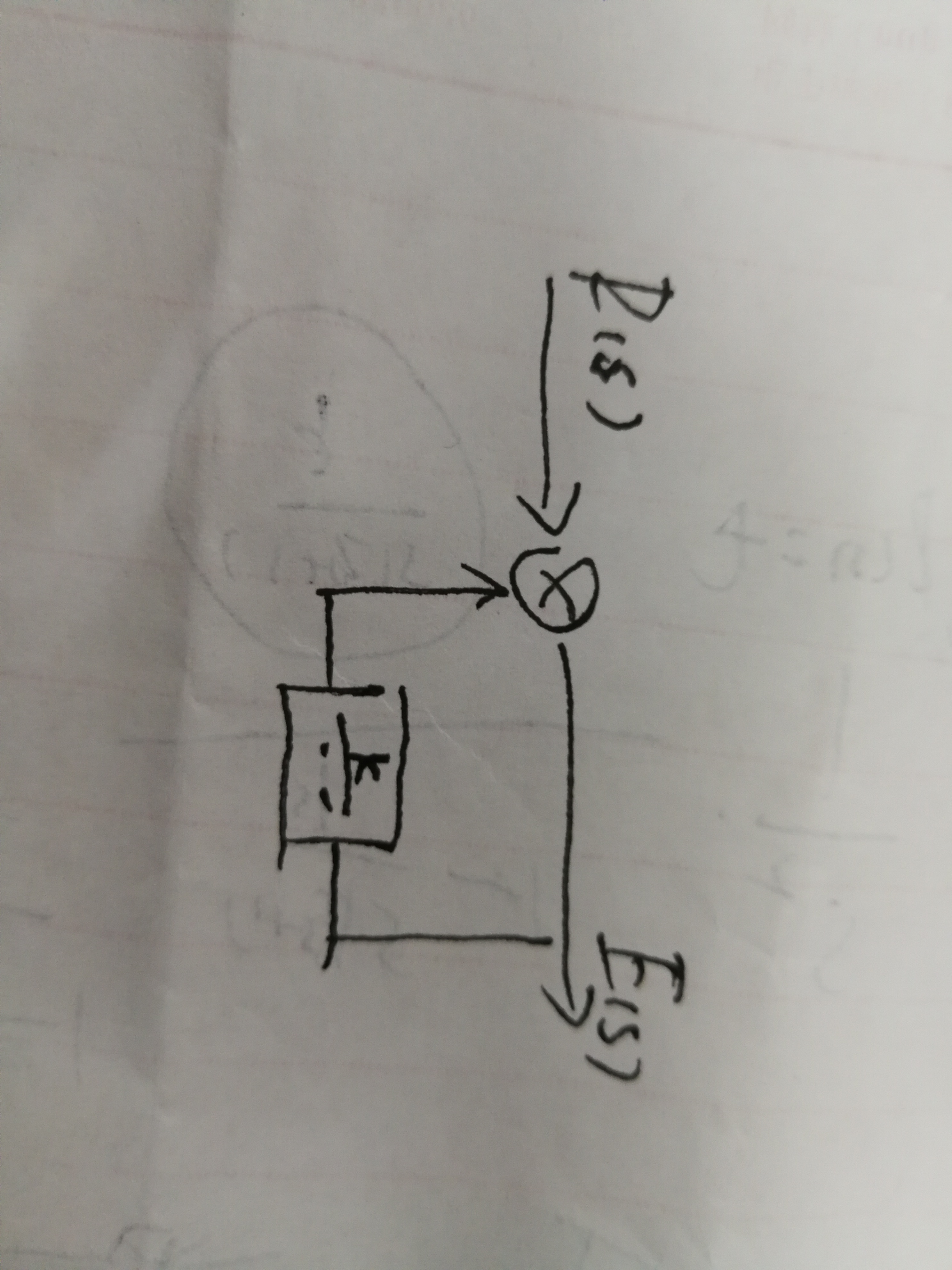
这样应该就可以理解了吧,再比如从扰动到误差:
把结构图变形成为这样,相信大家就可以利用Mason公式很轻松解出误差传递函数了
看看题目真容

按照我们上面说的步骤,求出误差传递函数,终值定理解出相应部分的稳态误差,最后相加
从答案可以看出,稳态误差值与自身结构参数和反馈结构类型有关
上面说的必须是单位脉冲是对于有差无差而言,这里的则输入信号可随意,就像
这个题是斜坡相应一样
静态误差系数法
这个方法讨论不同输入的稳态误差情况
使用条件:
1.稳定系统
2.采用输入定义的误差
3.不能有前馈通道
先说几个概念
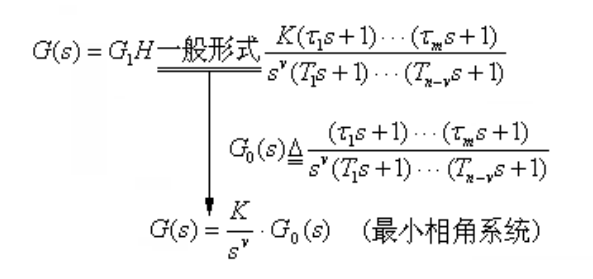
1.开环传递函数(没啥好说的)
2.系统型别v:观察开环传递函数的分母,说的文艺一点就是纯积分环节的个数,也就是在乘积模式下
单独的s^n为一项时候的n,事实上,目的就是希望吧这个s^n提出去之后的式子在s->0的时候等于1
注意!必须是在开环情况下去计算
针对一般情况,给出在不同形式的输入(阶跃/斜坡/二分之一平方)时候的稳态误差
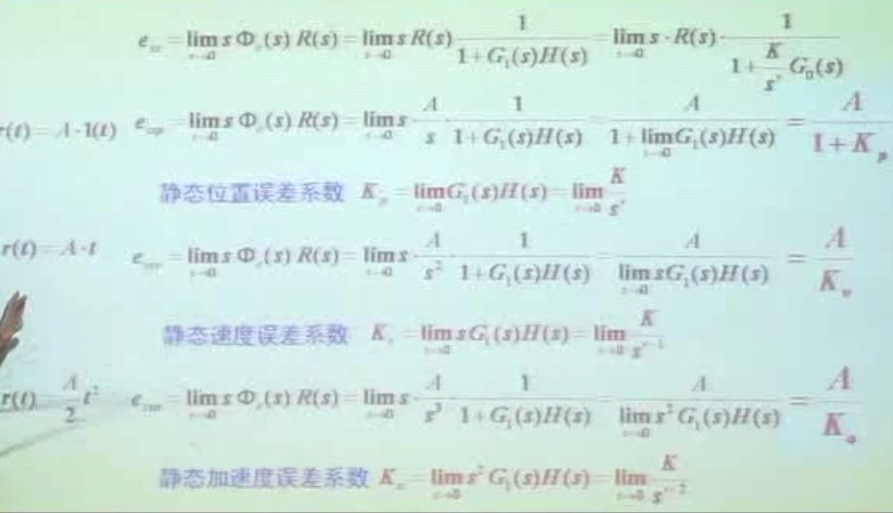
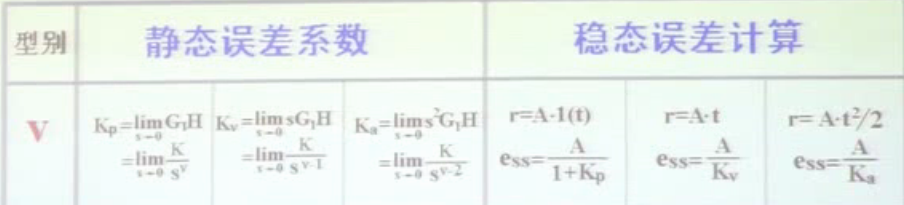
上面是推导过程,下面罗列成表格
我们计算只需要按照公式去计算就可以了,先算静态误差函数,再算稳态误差
图有点模糊,给个高清
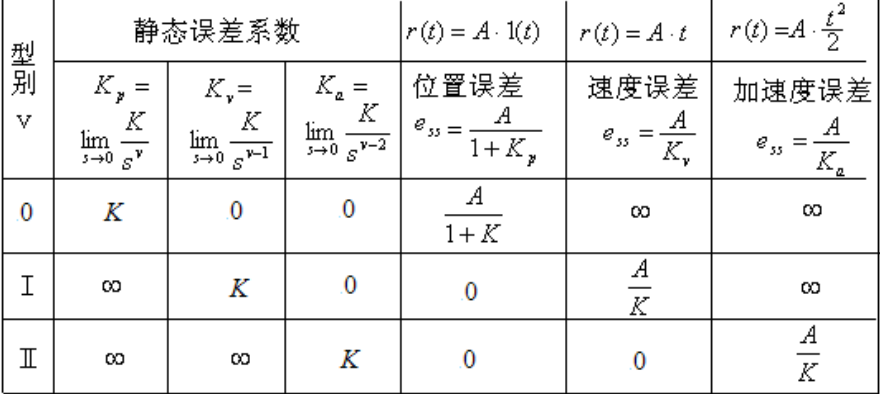
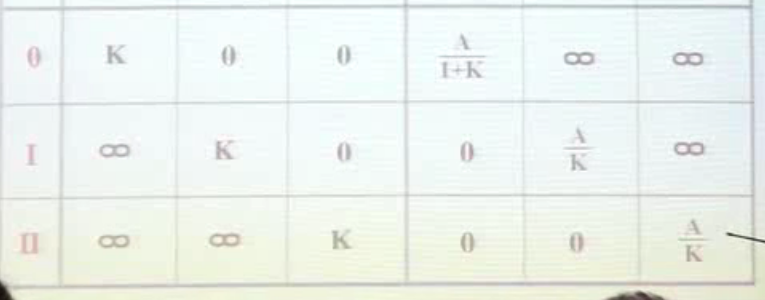
四个规律
1.型别相同时,系统的稳态误差是随着输入信号的档次的增加而增加(档次高就是t和分母上s的次方都变高,)
eg. 档次从低到高==》u(t)----tu(t)-----1/2 u(t)/(t^2)
档次相同时,稳态误差随着型别变大而变小
2.档次和型别对等的时候稳态误差是常数
3.档次高于型别,稳态误差 = ∞
4.档次低于型别,稳态误差 = 0
使用的时候注意点
1.计算出开环增益 k 和 型别 v(表格中的公式要用,有其实k,一定要算好了,尾一
v的得出需要验证,是否提出去之后剩下的在s=0时,式子=1)
2.复合输入,则使用叠加原理
静态误差法只能用在标准型的结构图上,如果是畸形图,那可以借助表格进行分析,但是不能直接使用去和往常一样去算误差
给个例题
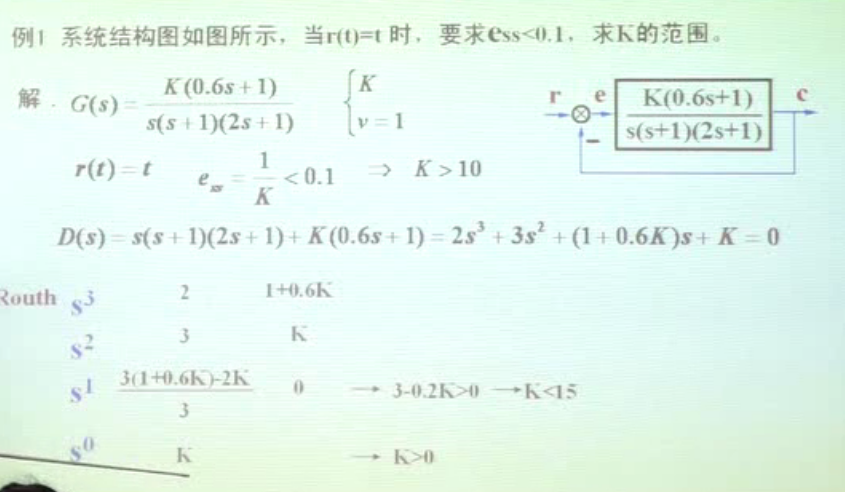 这个题目对新手来说肯定是拿到就静态误差法
这个题目对新手来说肯定是拿到就静态误差法
但是必须要注意判断稳定性得到的范围啊啊啊啊啊!!!记得判稳!!!!
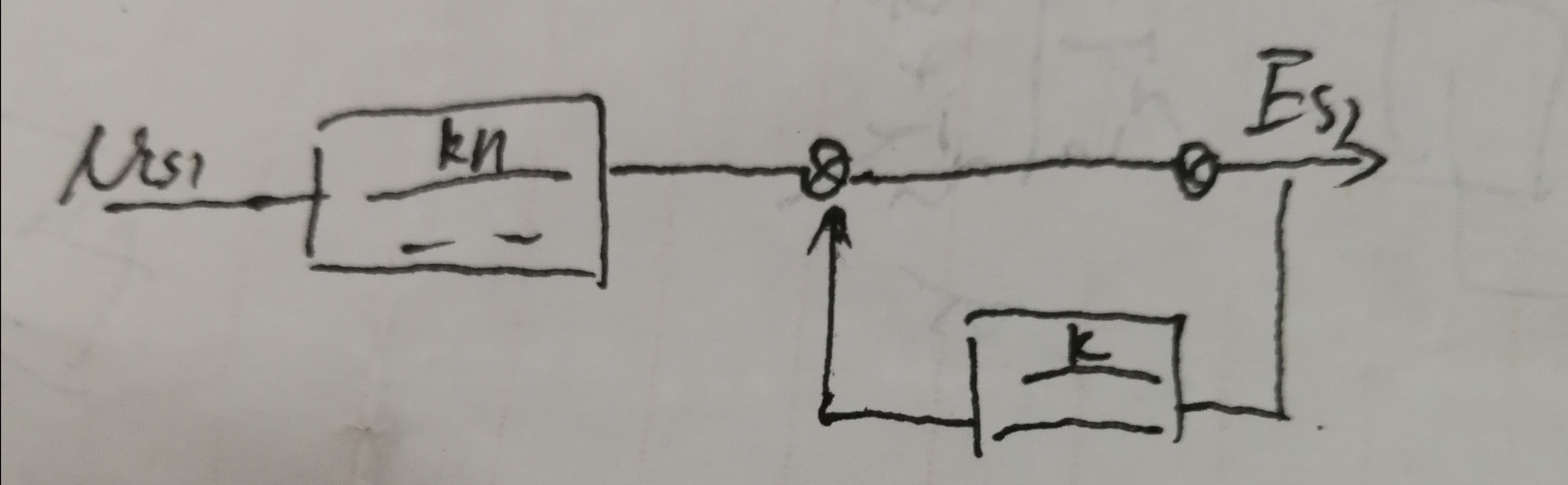
另外一个例题,做法不难,主要是结论了解一下
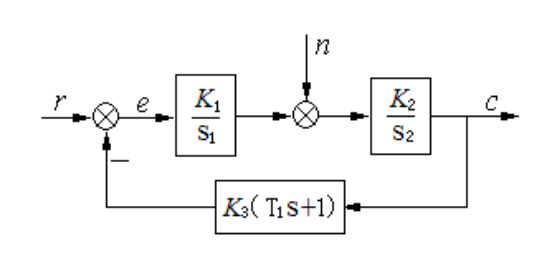
对这样一个结构图,想要改变干扰信号引起的误差,需要在干扰之前那个地方增大增益,或者加入积分环节,只有这里才会对干扰引起额误差产生影响
en = -A/k1 ess = A/k1k2k3
动态误差系数法
前面讲的静态误差,只能求出误差的稳态值,而我们现在说说动态误差,他可以帮助我们了解一个误差的稳态部分的变化之类的
思路
1.误差函数展开成泰勒级数
2.泰勒级数×输入得到误差
3.误差反变换
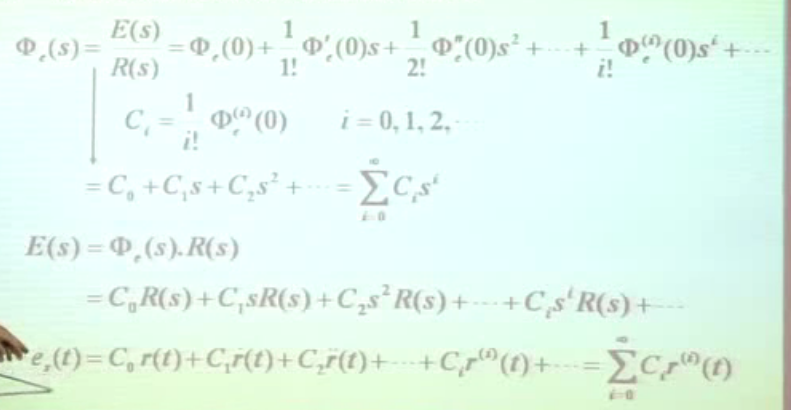
泰勒级数:难点和关键
 方法:1.系数比较法,
方法:1.系数比较法,
2.长除法
我的考纲上没有,等以后有空了再写动态的吧
最后
以上就是尊敬钢笔最近收集整理的关于(三)5.自动控制原理 Time domain analysis and correct 稳态误差的全部内容,更多相关(三)5.自动控制原理内容请搜索靠谱客的其他文章。








发表评论 取消回复