1、建模方法:
实验法:人为给系统施加某种测试信号,记录相应的输出,然后用适当的数学模型去逼近,也称为系统辨识方法;
解析法:利用已有的物理规律和化学规律来分析系统各部分的运动机理,获取其运动方程。
2、常用的数学模型:
①时域中常使用的数学模型:微分方程、差分方程;
②复域中常用的数学模型:传递函数、结构图;
③频域中常用的数学模型:频率特性。
2.1、微分方程:通常,解析法对系统或元部件建模如下:
①分析系统运动的因果关系,确定其输入、输出、中间变量及其之间关系;
②从输入端开始,按照信号的传递顺序,依据各变量所遵循的物理(或化学)规律,列写出各个元部件的动态方程;
③消去中间变量,写出输入与输出变量的微分方程。
注:系统的数学模型越精确,微分方程的阶次越高,直接对高阶微分方程求解困难。
如果系统参数或者结构发生变化,需要重新建模并求解微分方程,不利于系统的分析与设计。2.2、传递函数:在零初始条件下,输出信号c(t)的拉氏变换C(s)与输入信号r(t)的拉氏变换R(s)之比,记为G(s):G(s)=
注:“零初始条件”有两个含义:
①指输入在t=0之后才作用于系统,因此t≤0时系统输入量及其各阶导数为0;
②输入作用于系统之前,系统是相对静止的,就是系统的输出量及其各阶导数在t≤0时也为0。- G(s)的常用形式:
①有理分式形式,式中
;
②零极点形式,式中
为零点,
为极点,
为增益;
③时间常数形式,
为时间常数,
为放大系数。
- 由G(s)时间常数形式可知,任一复杂系统的G(s)可由如下6个典型环节组成:
①比例环节:G(s)==K;
②惯性环节:G(s)==
;(因储能元件,输出量不能立即跟上输入信号)
③积分环节(也称无差环节):G(s)==
(一阶),
(二阶);
④微分环节: G(s)==s(理想微分环节),
(一阶),
(二阶);
⑤振荡环节:G(s)==
,式中
称为无阻尼振荡频率,
为阻尼比;
⑥滞后环节(也称延迟环节): G(s)=。
注:i.因为实际物理系统总是存在惯性,并且能源功率有限,使得传递函数的分母阶次n总是
大于或等于分子阶次m;
ii.传递函数只取决于系统的结构和参数,与外界作用无关;
iii.传递函数的拉氏反变换是系统的脉冲响应,即G(s)=C(s)/R(s)=C(s)(因为r(t)=δ(t)的拉氏变
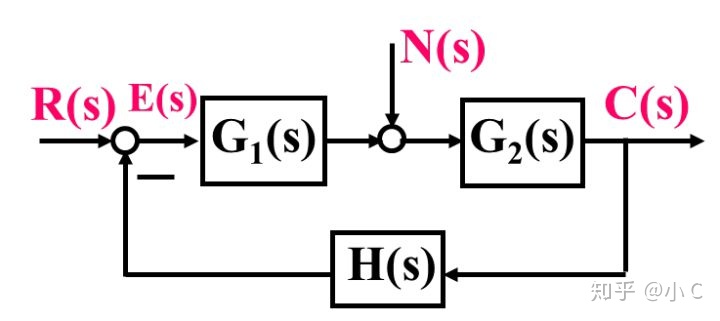
换为R(s)=1)。2.3、结构图 如下图,R(s)为指定输入信号,N(s)为干扰信号,C(s)为输出信号,E(s)为误差信号,其中R(s)与N(s)为系统的两个输入,E(s)和C(s)为系统的两个输出。
- 系统的开环传递函数:系统的主反馈信号B(s)与偏差信号E(s)之比,即
注:这里的开环传递函数是指闭环控制系统里的某一处开环的传递函数,而不是指开环控制
系统的传递函数。- 系统的闭环传递函数
①当N(s)=0时,输出C(s)对给定输入R(s)的传递函数为
②当R(s)=0时,输出C(s)对扰动N(s)的传递函数为
当给定输入和扰动同时作用被控系统时,根据线性叠加原理,有
- 系统的误差传递函数
①当N(s)=0时,则误差E(s)对R(s)的传递函数为
②当R(s)=0时,则误差E(s)对N(s)的传递函数为(简称扰动误差传递函数)
当给定输入和扰动同时作用被控系统时,根据线性叠加原理,系统误差为
注:当系统参数、结构发生变化时,微分方程形式模型需要重新建模,而传递函数形式模型
不必重新建模,这是因为经过拉普拉斯变换后串联、并联、反馈连接形式的环节,其运算变
为乘、加等低级运算,不再是微分运算。2.4、频率特性:稳定的线性定常系统在正弦信号的作用下,系统输出的稳态分量与输入的复数之比;其中,输出的稳态分量振幅与输入的振幅比A(w)称为幅频特性,输出的稳态分量相位与输入的相角之差φ(w)称为相频特性,即
注:i.频率特性表征了系统或元件对不同频率正弦输入的响应特性;
ii.φ(ω)大于零时称相角超前,小于零时称相角滞后;
iii.频率特性反映了系统的内在性质,与外界因素无关。3、数学模型是等价变换的:微分方程、传递函数、结构图、频率特性之间一一对应的。
欢迎大家前来交流相关自动控制问题。如有不对的地方,望不吝赐教!
***以上内容未经本人同意,禁止转载***
最后
以上就是专注宝马最近收集整理的关于简单典型二阶系统_自动控制原理要点---第二章 系统建模的全部内容,更多相关简单典型二阶系统_自动控制原理要点---第二章内容请搜索靠谱客的其他文章。
本图文内容来源于网友提供,作为学习参考使用,或来自网络收集整理,版权属于原作者所有。








发表评论 取消回复