本文叙述了在gazebo中添加完kinect V1相机,开启机器人和场景后,运行rqt_image_view命令不显示相机图像信息,并且查询不到相关相机话题的问题的解决方法。
1. 问题描述
在gazebo中添加kinect相机的过程如之前文章所述:
为Turtlebot3-Burger机器人添加Kinect深度相机并获取环境图像
运行rqt_image_view后出现如下问题:不显示深度信息和彩色信息,且没有与相机相关得话题和节点
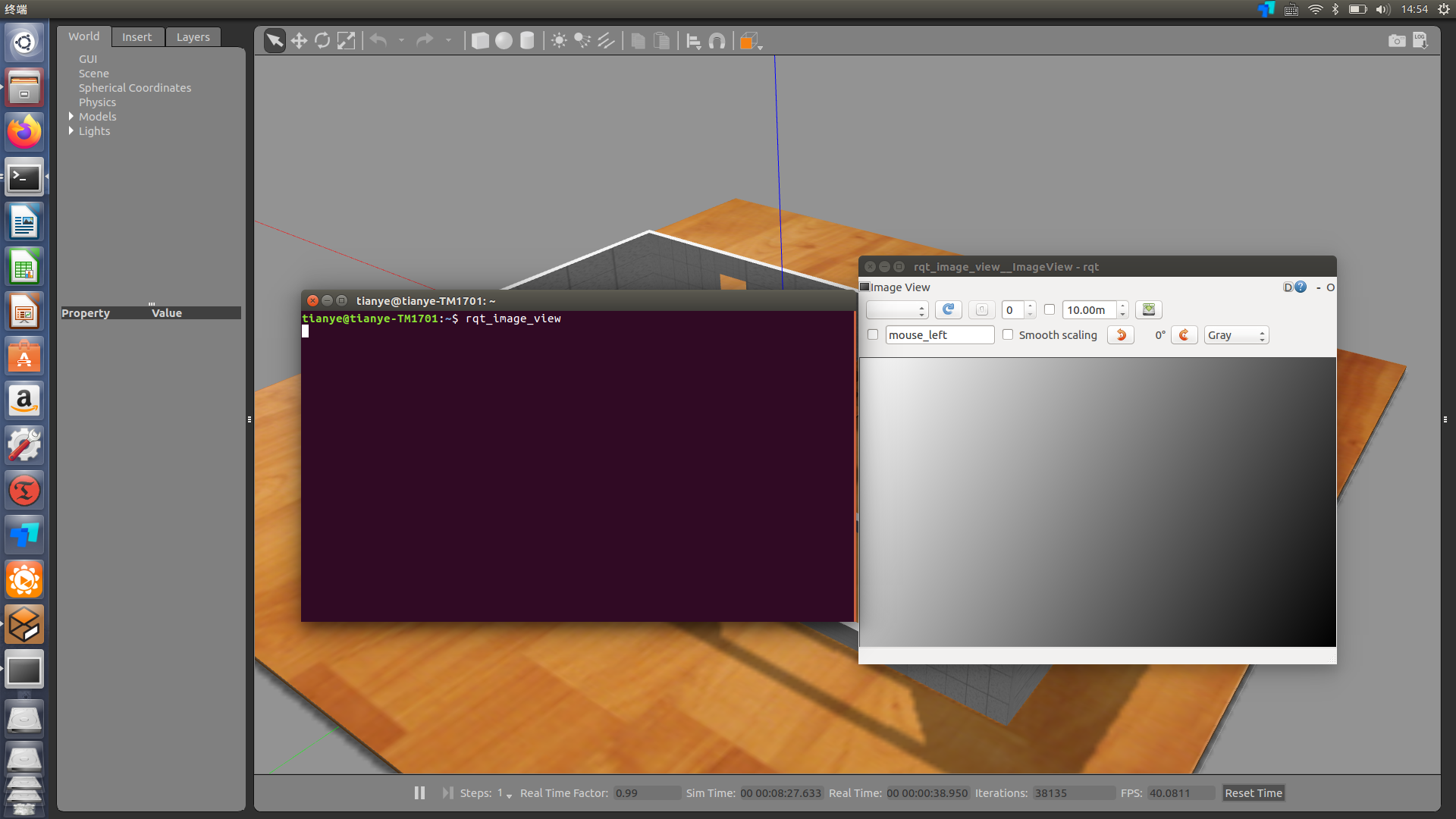
问题在于: gazebo版本过低,应将gazebo7升级为gazebo9
2. 解决方法
(1)卸载旧版本gazebo
#卸载原有gazebo
sudo apt-get remove ros-kinetic-gazebo*
sudo apt-get remove libgazebo*
sudo apt-get remove gazebo*
#查找当前安装的gazebo包
dpkg -l | grep gazebo
#卸载残留gazebo包
sudo apt-get remove XXX XXX XXX
(2)安装新版本gazebo
#添加源
sudo sh -c 'echo "deb http://packages.osrfoundation.org/gazebo/ubuntu-stable `lsb_release -cs` main" > /etc/apt/sources.list.d/gazebo-stable.list'
wget http://packages.osrfoundation.org/gazebo.key -O - | sudo apt-key add -
sudo apt-get update
sudo apt-get install gazebo9
sudo apt-get install ros-kinetic-gazebo9-ros-control
sudo apt-get install ros-kinetic-gazebo9-ros-pkgs
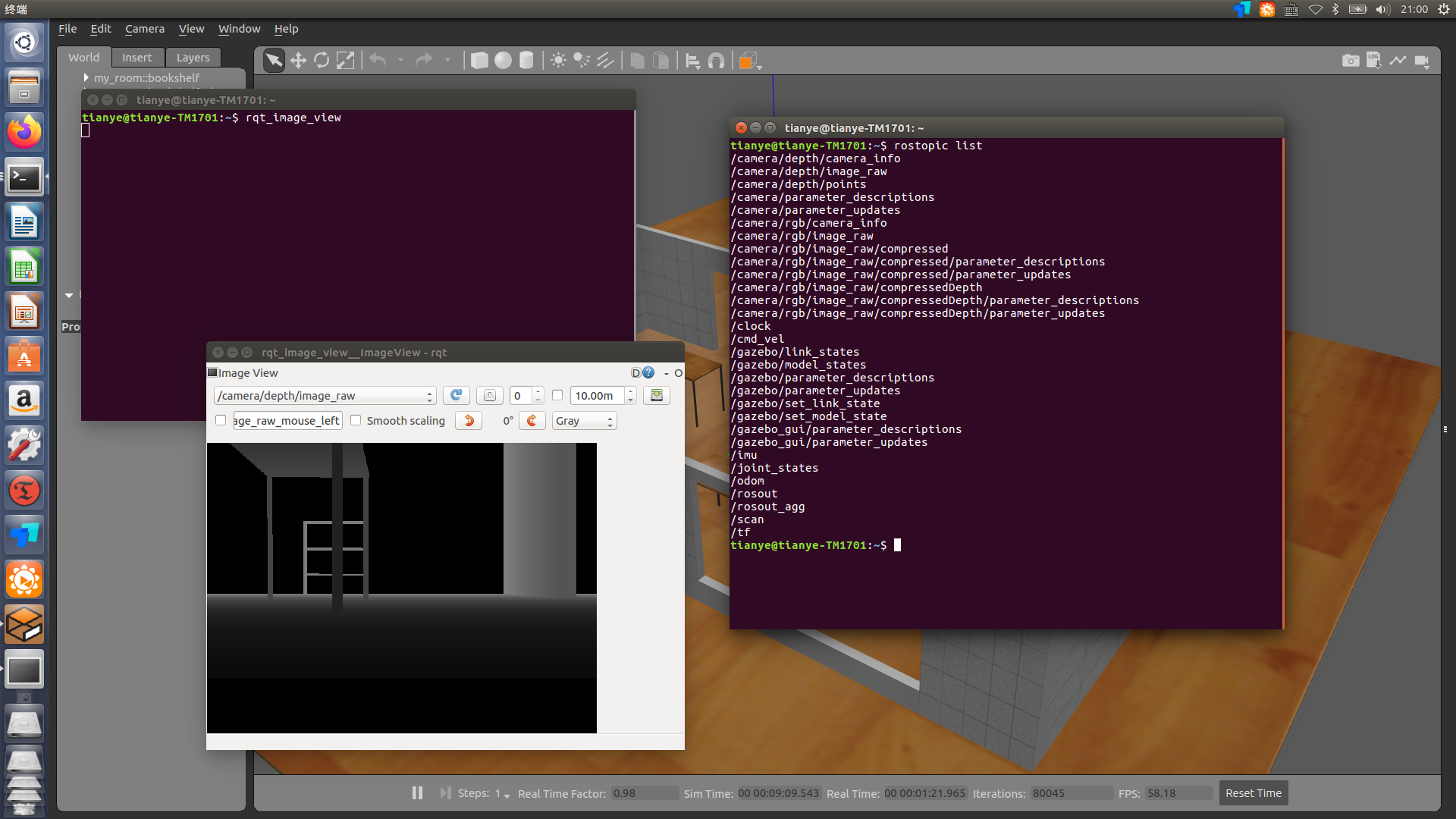
重新运行命令,结果如下:
参考资料:
ubunut16.04 kinetic版本gazebo7升级为gazebo9(完美解决!!!)
【ROS学习】12.ROS启动GAZEBO时摄像头的发布进程被杀死,导致RQT_IMAGE_VIEW无法显示画面
最后
以上就是落寞蚂蚁最近收集整理的关于关于运行rqt_image_view命令后不显示相机图像信息的问题的解决方法的全部内容,更多相关关于运行rqt_image_view命令后不显示相机图像信息内容请搜索靠谱客的其他文章。
本图文内容来源于网友提供,作为学习参考使用,或来自网络收集整理,版权属于原作者所有。








发表评论 取消回复