一、思路
深度相机会发布一个将深度图像与彩色图像对齐的topic:/camera/aligned_depth_to_color/image_raw(深度流向彩色流对齐),利用该topic可以获取对应的三维坐标,该坐标还需要经过深度相机的内参矩阵变换。
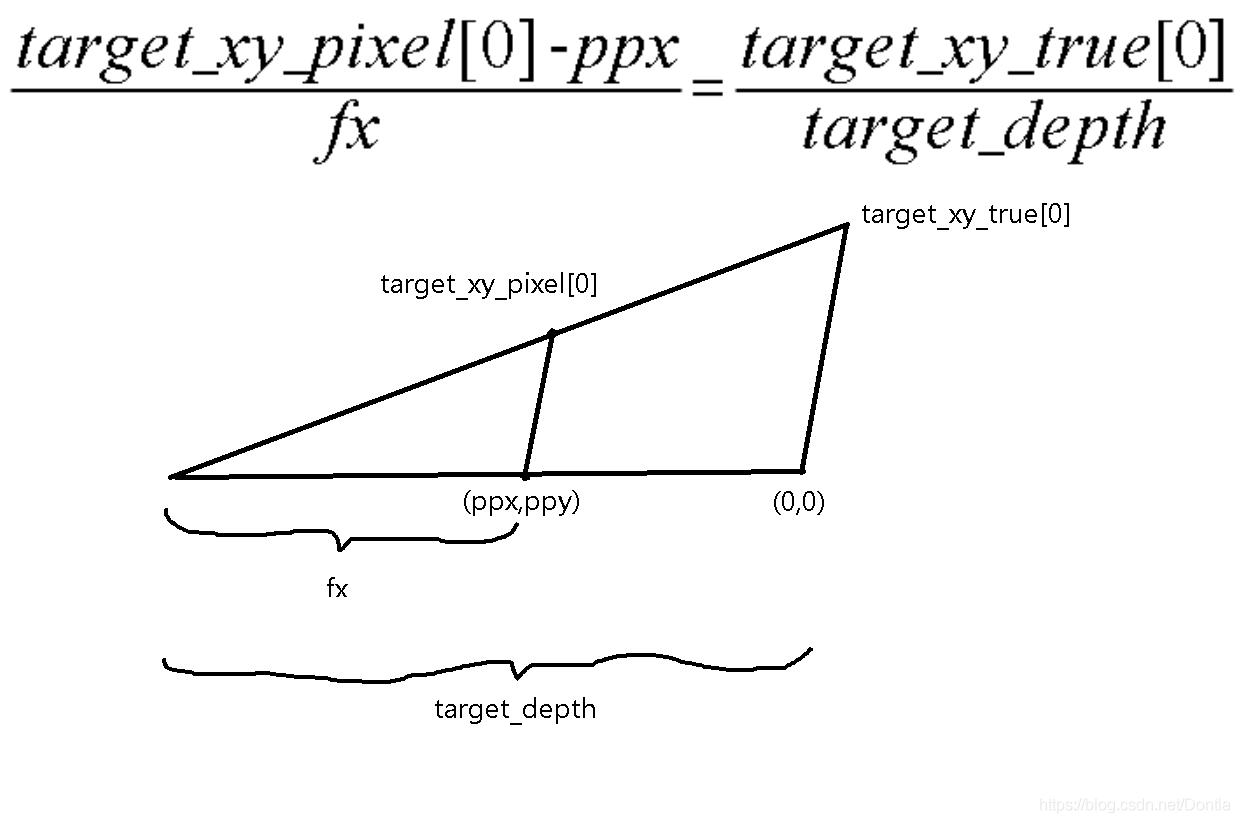
二、变换原理
三、程度实现
3.1 准备工作
1、设置 realsense-ros 的rs_camera.launch文件
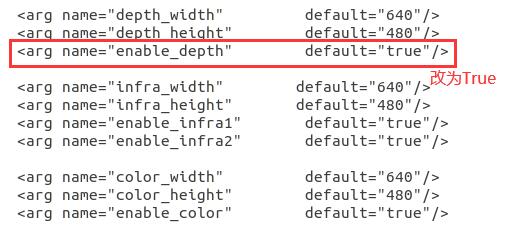
说一个这里我自己遇到的坑,realsense默认的分辨率应该是1280×720,我将彩色图像的分辨率改为了640×480,在使用深度图像时没有更改深度图像的分辨率,导致订阅不到这个topic/camera/aligned_depth_to_color/image_raw,所以一定要将彩色图像和深度图像设置相同的分辨率
3.2获取相机的内参矩阵
import pyrealsense2 as rs
import numpy as np
import cv2
import json
pipeline = rs.pipeline() # 定义流程pipeline
config = rs.config() # 定义配置config
config.enable_stream(rs.stream.depth, 640, 480, rs.format.z16, 30) # 配置depth流
config.enable_stream(rs.stream.color, 640, 480, rs.format.bgr8, 30) # 配置color流
profile = pipeline.start(config) # 流程开始
align_to = rs.stream.color # 与color流对齐
align = rs.align(align_to)
frames = pipeline.wait_for_frames() # 等待获取图像帧
aligned_frames = align.process(frames) # 获取对齐帧
aligned_depth_frame = aligned_frames.get_depth_frame() # 获取对齐帧中的depth帧
color_frame = aligned_frames.get_color_frame() # 获取对齐帧中的color帧
############### 相机参数的获取 #######################
intr = color_frame.profile.as_video_stream_profile().intrinsics # 获取相机内参
depth_intrin = aligned_depth_frame.profile.as_video_stream_profile().intrinsics # 获取深度参数(像素坐标系转相机坐标系会用到)
camera_parameters = {'fx': intr.fx, 'fy': intr.fy,
'ppx': intr.ppx, 'ppy': intr.ppy,
'height': intr.height, 'width': intr.width,
'depth_scale': profile.get_device().first_depth_sensor().get_depth_scale()
}
# 保存内参到本地
with open('./intrinsics.json', 'w') as fp:
json.dump(camera_parameters, fp)
内参矩阵
K = [fx 0 ppx;0 fy ppy;0 0 1]
3.3 获取三维坐标
#!/usr/bin/python
# encoding: utf-8
import rospy
from std_msgs.msg import String
from action_recognition.msg import Torso
from action_recognition.msg import Distance
from sensor_msgs.msg import Image, CameraInfo
import message_filters
import cv2
from cv_bridge import CvBridge, CvBridgeError
def callback(data):
global bridge
bridge = CvBridge()
pub = rospy.Publisher('/Distance', Distance, queue_size=1)
rate = rospy.Rate(10)
depth_image = bridge.imgmsg_to_cv2(data, '16UC1')
# 定义需要得到真实三维信息的像素点(x, y)
x = 320
y = 240
real_z = depth_image[x, y] * 0.001 # mm转换m
real_x = (x - ppx) / fx * real_z
real_y = (y - ppy) / fy * real_z
pub.publish(Distance(real_z))
cv2.imshow("Image window", depth_image)
cv2.waitKey(3)
def get_distance():
rospy.init_node('get_distance', anonymous=True)
rospy.Subscriber('/camera/aligned_depth_to_color/image_raw', Image, callback)
rospy.spin()
if __name__ == '__main__':
global fx, fy, ppx, ppy
fx = 614.9630737304688
fy = 615.1746215820312
ppx = 318.2005920410156
ppy = 241.51356506347656
get_distance()
注意:在将ROS的图像格式转换为opencv格式时,该选用哪种编码?
depth_image = bridge.imgmsg_to_cv2(data, '16UC1')
这里我是查看了原深度图像的编码格式,为16位所以也选用了16位
rostopic echo /camera/aligned_depth_to_color/image_raw/encoding
16位深度图即一个像素值占两个byte,是16位整数,单位是毫米,这也是上面程序中求真实距离时乘0.001的原因(毫米转米)
最后
以上就是无私糖豆最近收集整理的关于ROS/RealSenseD435i:已知二维图像中一点获取其深度图像中的三维坐标(python实现)的全部内容,更多相关ROS/RealSenseD435i:已知二维图像中一点获取其深度图像中内容请搜索靠谱客的其他文章。
本图文内容来源于网友提供,作为学习参考使用,或来自网络收集整理,版权属于原作者所有。
![[neotic-moveit] 子坐标系框架 Subframes](https://www.shuijiaxian.com/files_image/reation/bcimg23.png)







发表评论 取消回复