数字电路基础与Quartus-II入门
- 一、D触发器
- 1.简介
- 2.结构
- 3.工作原理
- 4.特征
- 5.脉冲特性
- 二、在 Quartus-II 中自己用门电路设计一个D触发器,并进行仿真,时序波形验证
- 1.在Quartus中新建工程
- 2.创建原理图文件
- 3.编译原理图文件
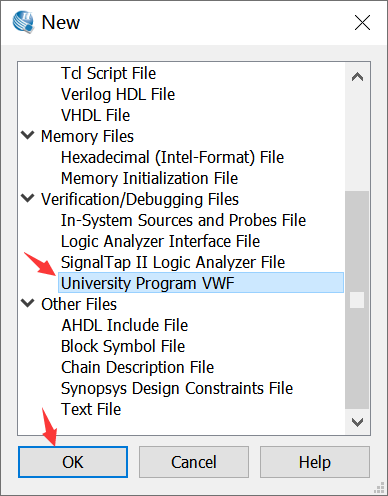
- 4.创建VWF文
- 5.波形仿真
- 三、在 Quartus-II 中直接调用一个D触发器电路,进行仿真,时序波形验证
- 1.新建工程
- 2.创建原理图
- 3.编译原理图
- 4.创建VWF文件
- 5.波形仿真
- 四、总结
一、D触发器
1.简介
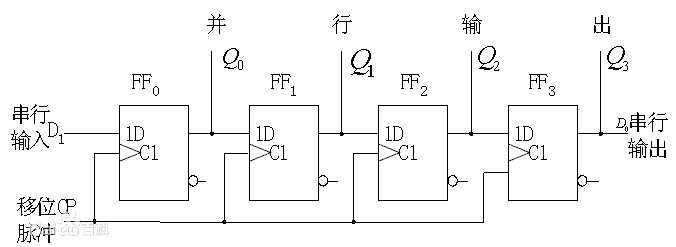
D触发器是一个具有记忆功能的,具有两个稳定状态的信息存储器件,是构成多种时序电路的最基本逻辑单元,也是数字逻辑电路中一种重要的单元电路。因此,D触发器在数字系统和计算机中有着广泛的应用。触发器具有两个稳定状态,即"0"和"1",在一定的外界信号作用下,可以从一个稳定状态翻转到另一个稳定状态。D触发器有集成触发器和门电路组成的触发器。触发方式有电平触发和边沿触发两种,前者在CP(时钟脉冲)=1时即可触发,后者多在CP的前沿(正跳变0→1)触发。D触发器的次态取决于触发前D端的状态,即次态=D。因此,它具有置0、置1两种功能。对于边沿D触发器,由于在CP=1期间电路具有维持阻塞作用,所以在CP=1期间,D端的数据状态变化,不会影响触发器的输出状态。D触发器应用很广,可用做数字信号的寄存,移位寄存,分频和波形发生器等等。
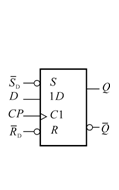
2.结构
D触发器(data flip-flop或delay flip-flop)由4个与非门组成,其中G1和G2构成基本RS触发器。电平触发的主从触发器工作时,必须在正跳沿前加入输入信号。如果在CP高电平期间输入端出现干扰信号,那么就有可能使触发器的状态出错。而边沿触发器允许在CP触发沿来到前一瞬间加入输入信号。这样,输入端受干扰的时间大大缩短,受干扰的可能性就降低了。边沿D触发器也称为维持-阻塞边沿D触发器。边沿D触发器可由两个D触发器串联而成,但第一个D触发器的CP需要用非门反向。
3.工作原理
SD和RD接至基本RS触发器的输入端,它们分别是预置和清零端,低电平有效。当SD=1且RD=0时(SD的非为0,RD的非为1,即在两个控制端口分别从外部输入的电平值,原因是低电平有效),不论输入端D为何种状态,都会使Q=0,Q非=1,即触发器置0;当SD=0且RD=1(SD的非为1,RD的非为0)时,Q=1,Q非=0,触发器置1,SD和RD通常又称为直接置1和置0端。我们设它们均已加入了高电平,不影响电路的工作。
工作过程如下:
1)CP=0时,与非门G3和G4封锁,其输出Q3=Q4=1,触发器的状态不变。同时,由于Q3至Q5和Q4至Q6的反馈信号将这两个门打开,因此可接收输入信号D,Q5=D,Q6=Q5非=D非。
2)当CP由0变1时触发器翻转。这时G3和G4打开,它们的输入Q3和Q4的状态由G5和G6的输出状态决定。Q3=Q5非=D非,Q4=Q6非=D。由基本RS触发器的逻辑功能可知,Q=Q3非=D。
3)触发器翻转后,在CP=1时输入信号被封锁。这是因为G3和G4打开后,它们的输出Q3和Q4的状态是互补的,即必定有一个是0,若Q3为0,则经G3输出至G5输入的反馈线将G5封锁,即封锁了D通往基本RS触发器的路径;该反馈线起到了使触发器维持在1状态和阻止触发器变为0状态的作用,故该反馈线称为置1维持线,置0阻塞线。Q4为0时,将G3和G6封锁,D端通往基本RS触发器的路径也被封锁。Q4输出端至G6反馈线起到使触发器维持在0状态的作用,称作置0维持线;Q4输出至G3输入的反馈线起到阻止触发器置1的作用,称为置1阻塞线。因此,该触发器常称为维持-阻塞触发器。
总之,该触发器是在CP正跳沿前接受输入信号,正跳沿时触发翻转,正跳沿后输入即被封锁,三步都是在正跳沿后完成,所以有边沿触发器之称。与主从触发器相比,同工艺的边沿触发器有更强的抗干扰能力和更高的工作速度。 /span>。由基本RS触发器的逻辑功能可知,Q=Q3非=D。
4.特征

5.脉冲特性
1)建立时间
由于CP信号是加到门G3和G4上的,因而在CP上升沿到达之前门G5和G6输出端的状态必须稳定地建立起来。输入信号到达D端以后,要经过一级门电路的传输延迟时间G5的输出状态才能建立起来,而G6的输出状态需要经过两级门电路的传输延迟时间才能建立,因此D端的输入信号必须先于CP的上升沿到达,而且建立时间应满足:tset≥2tpd。
2)保持时间
为实现边沿触发,应保证CP=1期间门G5的输出状态不变,不受D端状态变化的影响。为此,在D=0的情况下,当CP上升沿到达以后还要等门G3输出的低电平返回到门G5的输入端以后,D端的低电平才允许改变。因此输入低电平信号的保持时间为tHL≥tpd。在D=1的情况下,由于CP上升沿到达后G4的输出将G3封锁,所以不要求输入信号继续保持不变,故输入高电平信号的保持时间tHH=0。
3)传输延迟时间
从CP上升沿到达时开始计算,输出由高电平变为低电平的传输延迟时间tPHL和由低电平变为高电平的传输延迟时间tPLH分别是:tPHL=3tpdt PLH=2tpd。
4)最高时钟频率
为保证由门G1~G4组成的同步RS触发器能可靠地翻转,CP高电平的持续时间应大于 tPHL,所以时钟信号高电平的宽度tWH应大于tPHL。而为了在下一个CP上升沿到达之前确保门G5和G6新的输出电平得以稳定地建立,CP低电平的持续时间不应小于门G4的传输延迟时间和tset之和,即时钟信号低电平的宽度tWL≥tset+tpd。
在实际集成触发器中,每个门传输时间是不同的,并且作了不同形式的简化,因此上面讨论的结果只是一些定性的物理概念。其真实参数由实验测定。
在考虑建立保持时间时,应该考虑时钟树向后偏斜的情况,在考虑建立时间时应该考虑时钟树向前偏斜的情况。在进行后仿真时,最大延迟用来检查建立时间,最小延时用来检查保持时间。
建立时间的约束和时钟周期有关,当系统在高频时钟下无法工作时,降低时钟频率就可以使系统完成工作。保持时间是一个和时钟周期无关的参数,如果设计不合理,使得布局布线工具无法布出高质量的时钟树,那么无论如何调整时钟频率也无法达到要求,只有对所设计系统作较大改动才有可能正常工作,导致设计效率大大降低。因此合理的设计系统的时序是提高设计质量的关键。在可编程器件中,时钟树的偏斜几乎可以不考虑,因此保持时间通常都是满足的。
二、在 Quartus-II 中自己用门电路设计一个D触发器,并进行仿真,时序波形验证
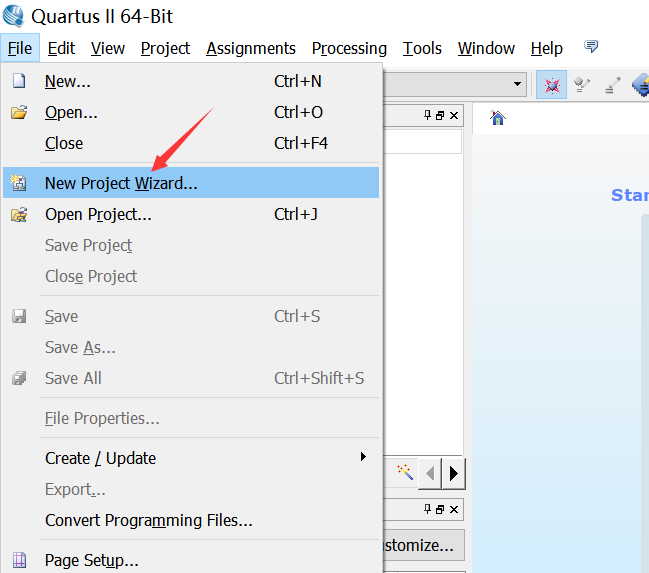
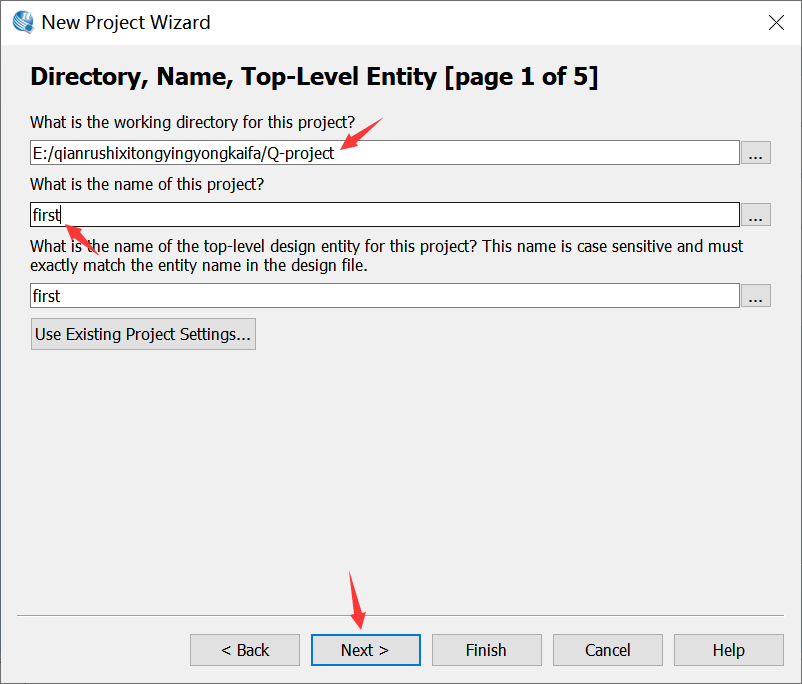
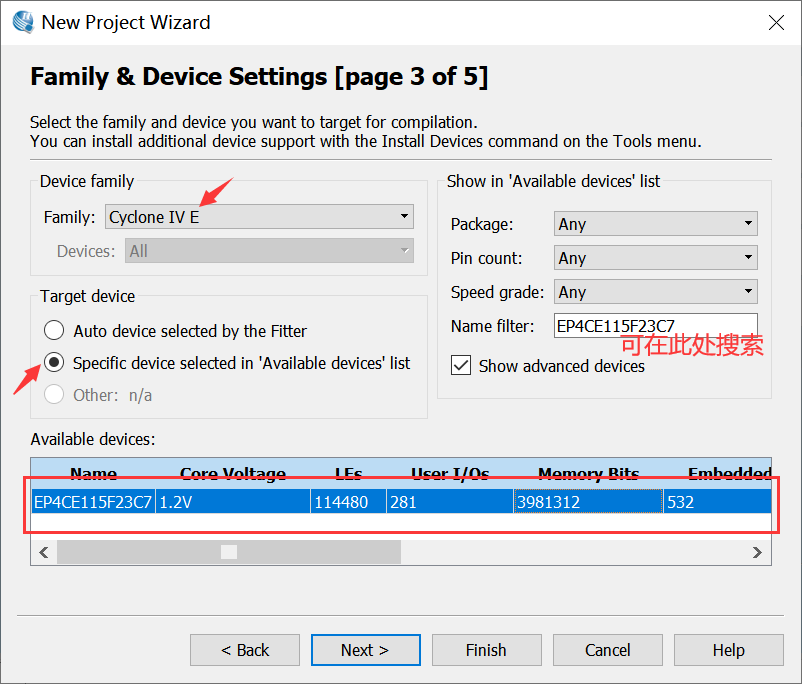
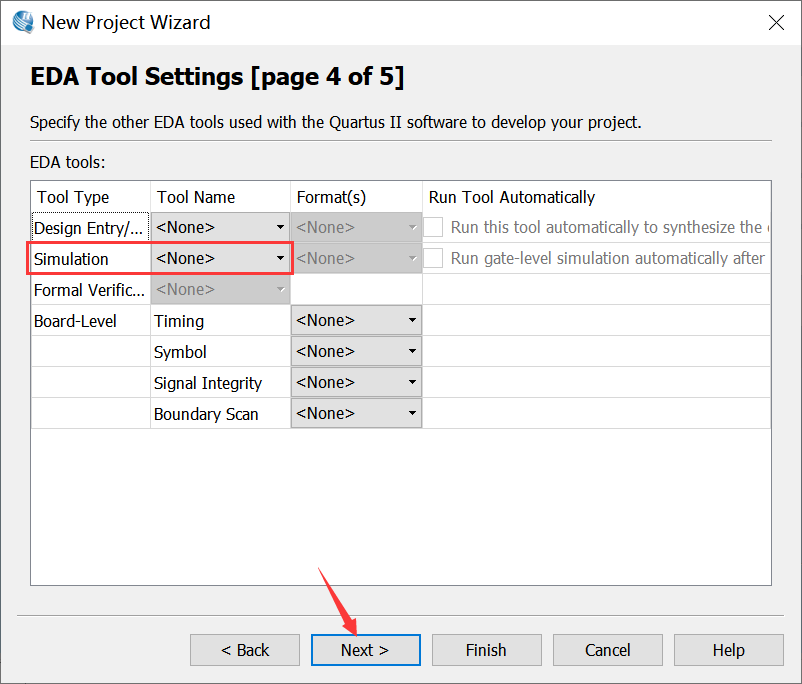
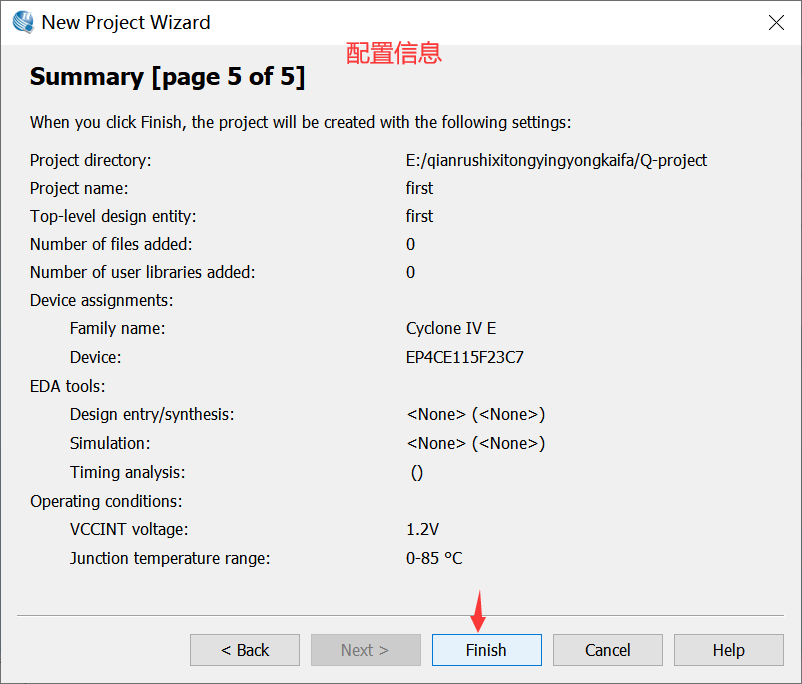
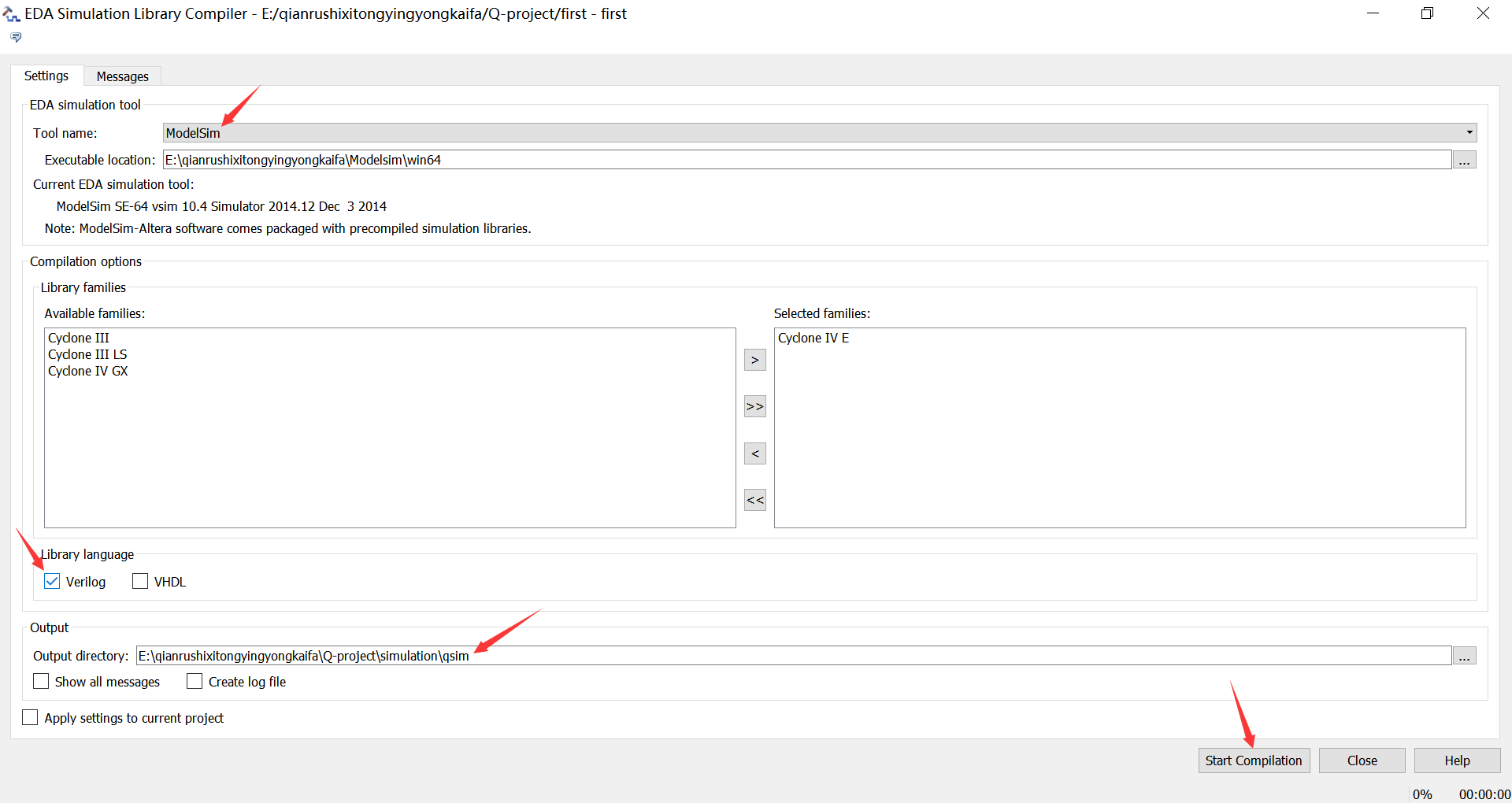
1.在Quartus中新建工程
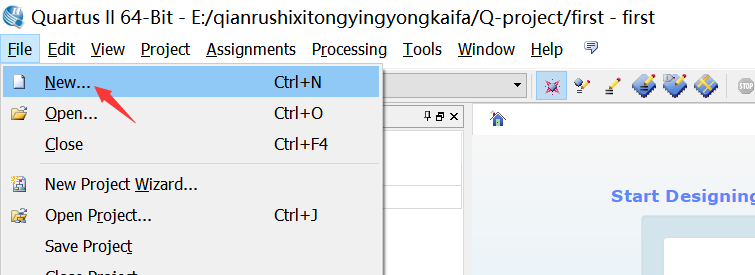
2.创建原理图文件
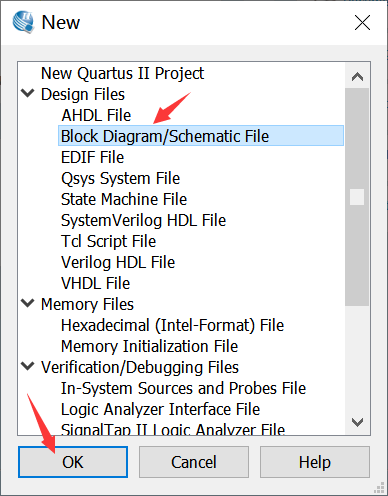
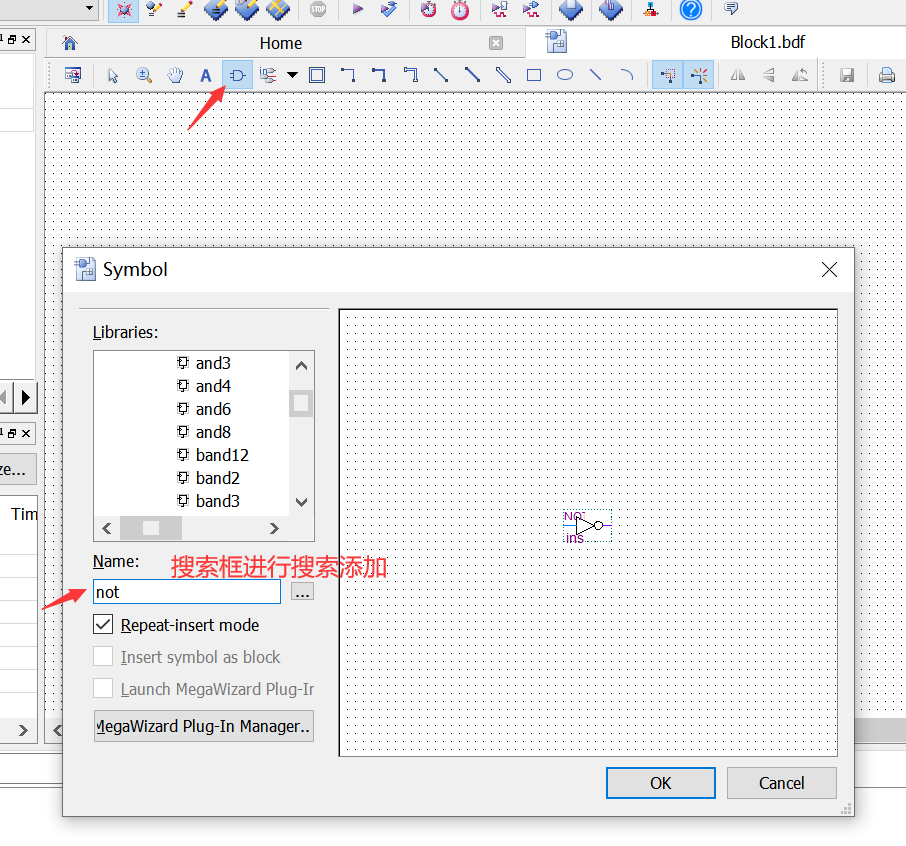
点击【插头图标】弹出工具窗口,搜索元件,然后在图纸上摆放:
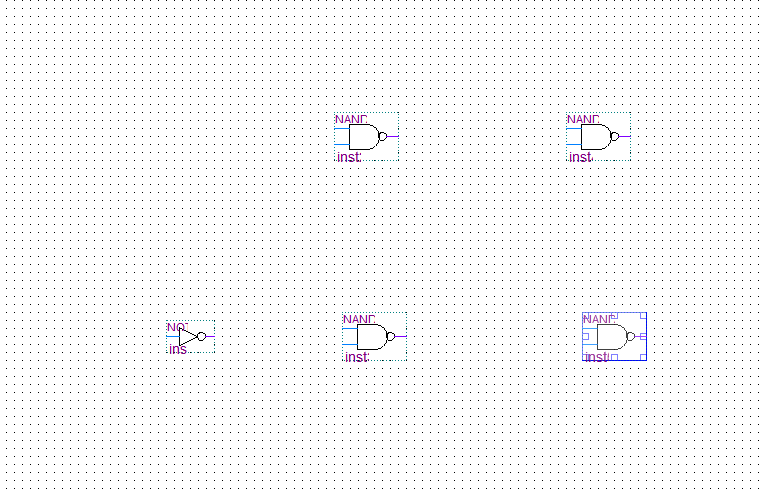
4 个 nand2 与非门;
1 个 not 非门。
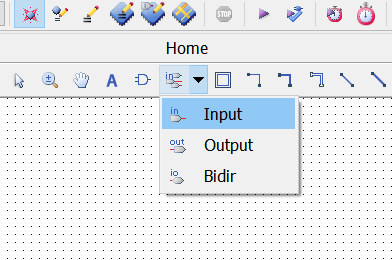
添加两个输入管脚和两个输出管脚,双击 Pin Name 即可修改管脚名。
完整图如下
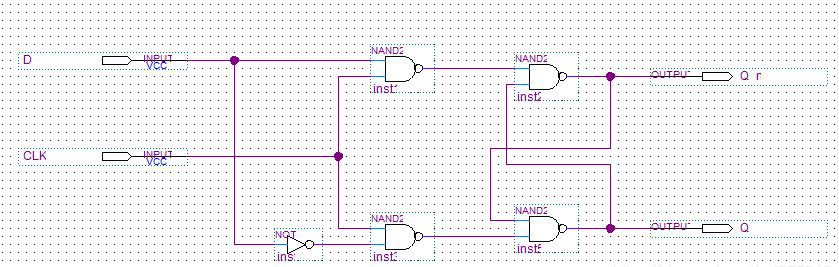
保存电路图
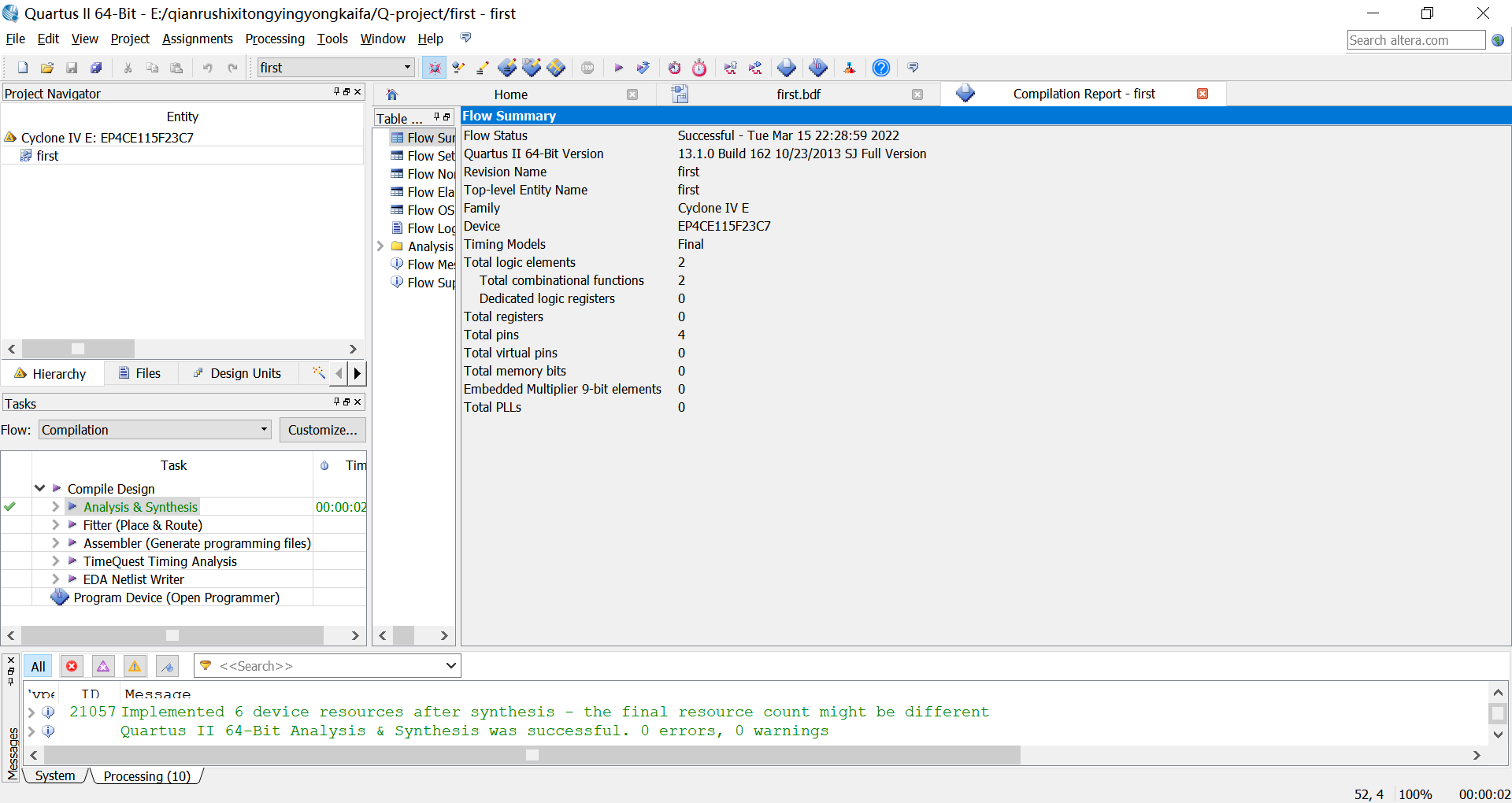
3.编译原理图文件
点击编译

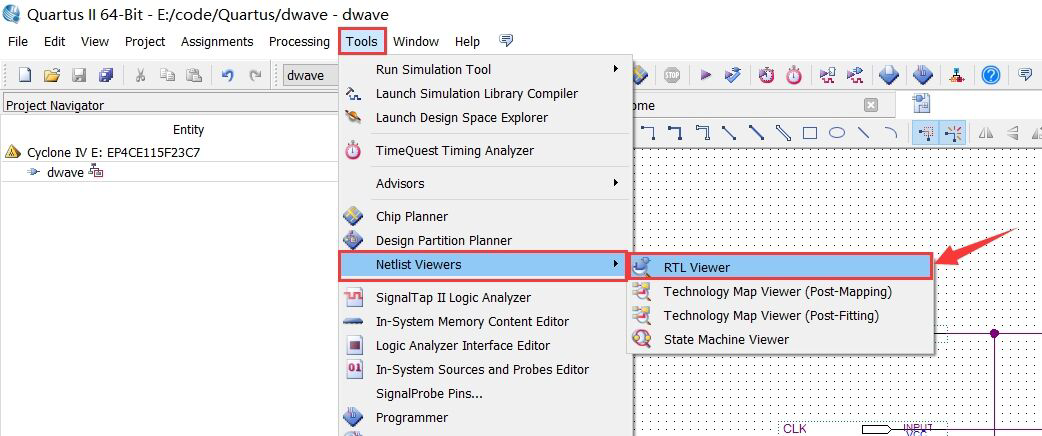
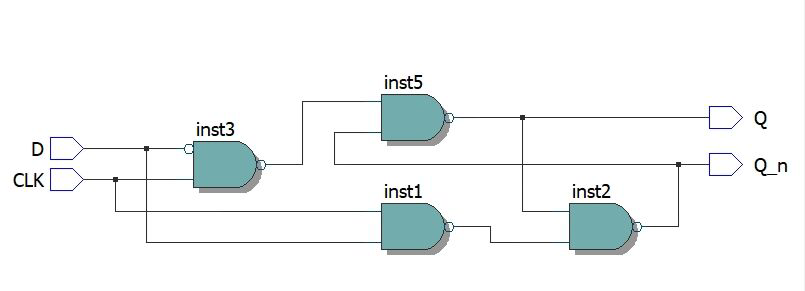
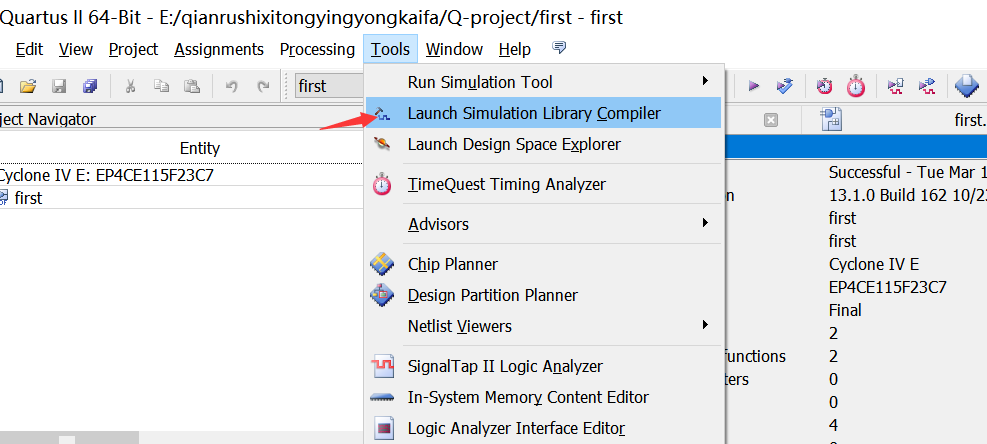
查看硬件电路图:点击【Tools】→【Netlist Viewers】→【RTL Viewer】。
4.创建VWF文
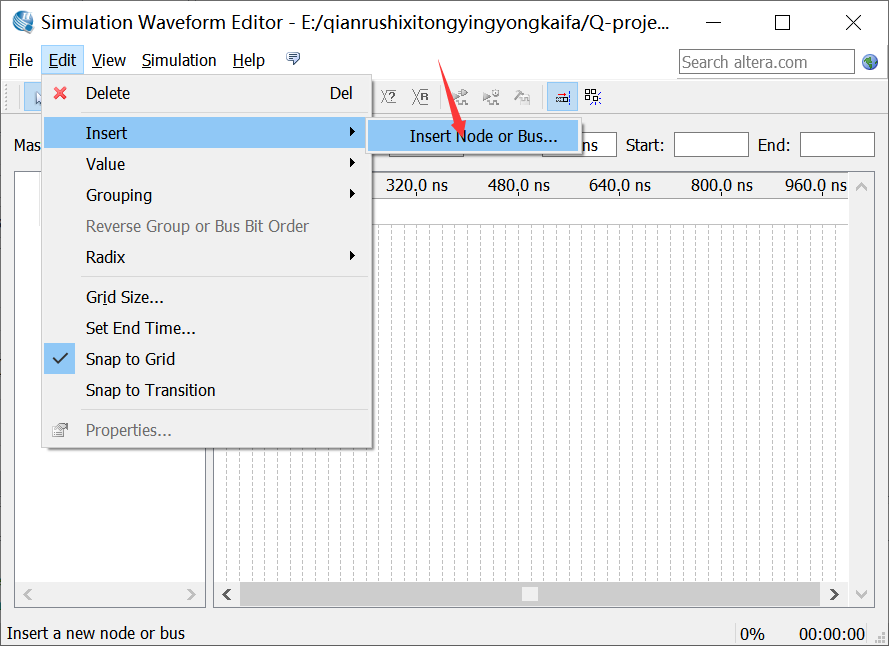
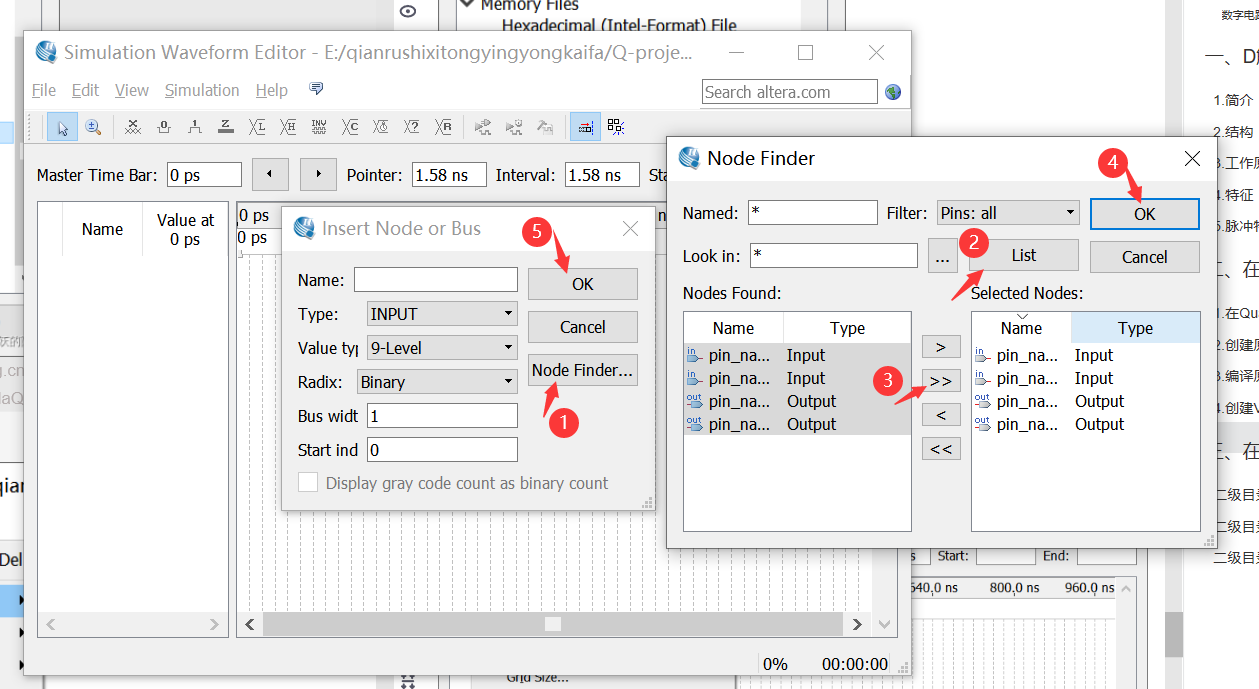
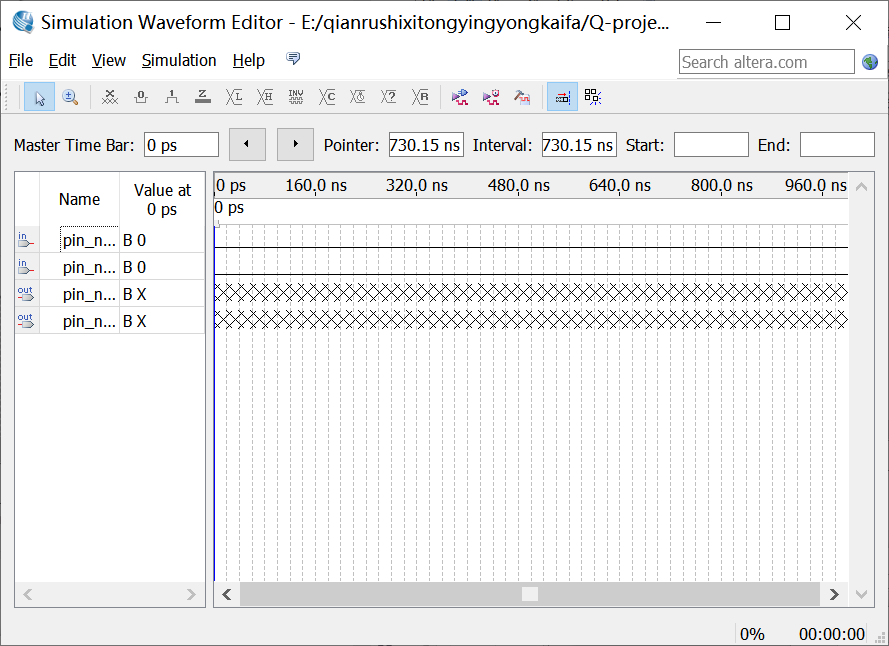
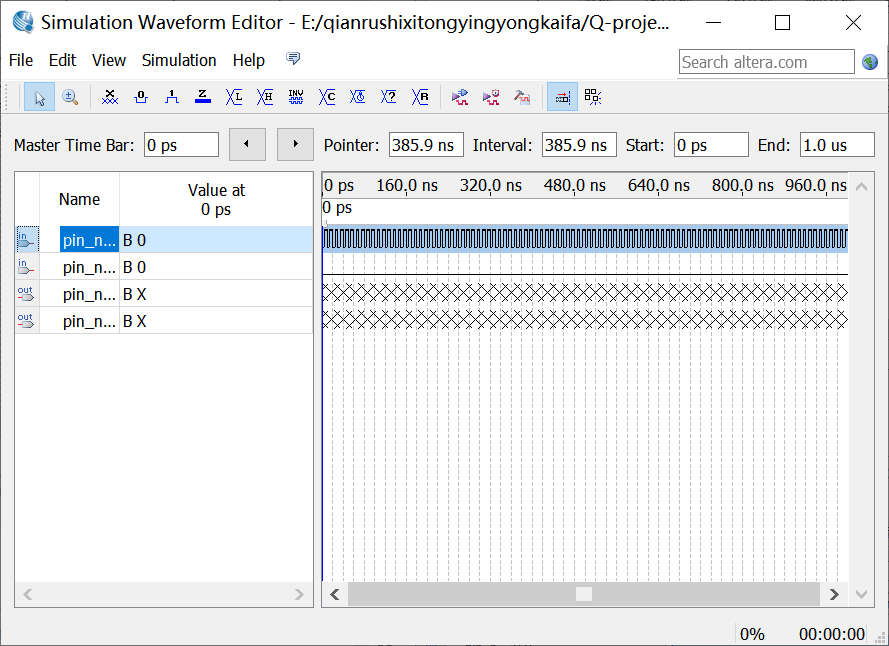
编辑输入CLK,产生时钟信号
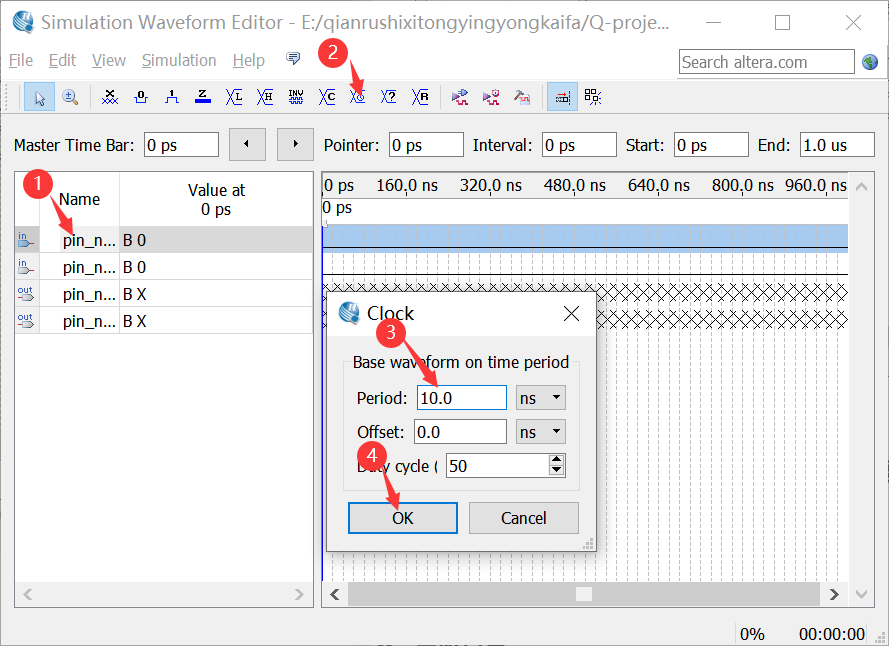
保存文件

点击仿真按钮进行仿真
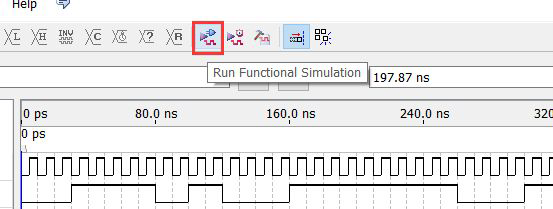
延迟了半个时钟周期
三、在 Quartus-II 中直接调用一个D触发器电路,进行仿真,时序波形验证
1.新建工程
同上
2.创建原理图
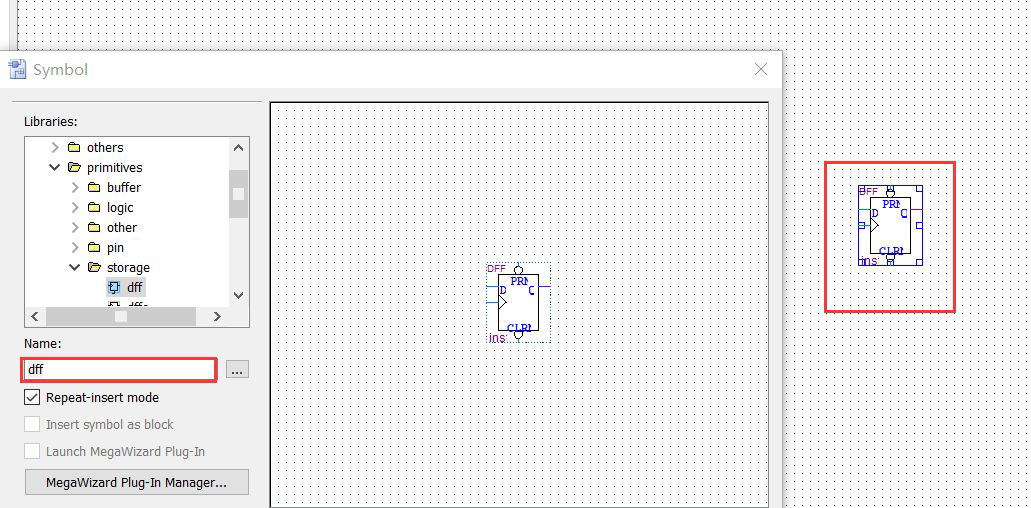
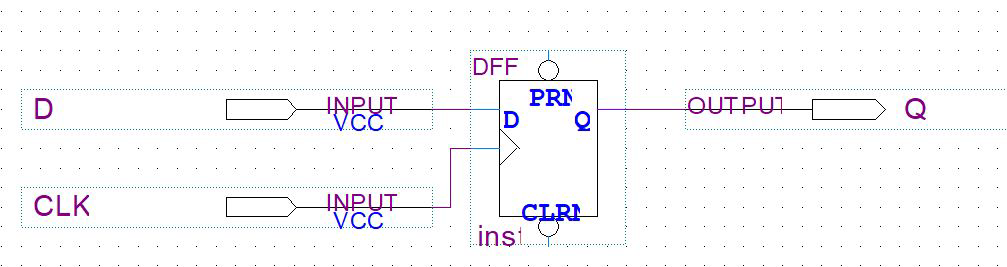
直接调用D处罚器dff
 画出完整电路图
画出完整电路图
3.编译原理图
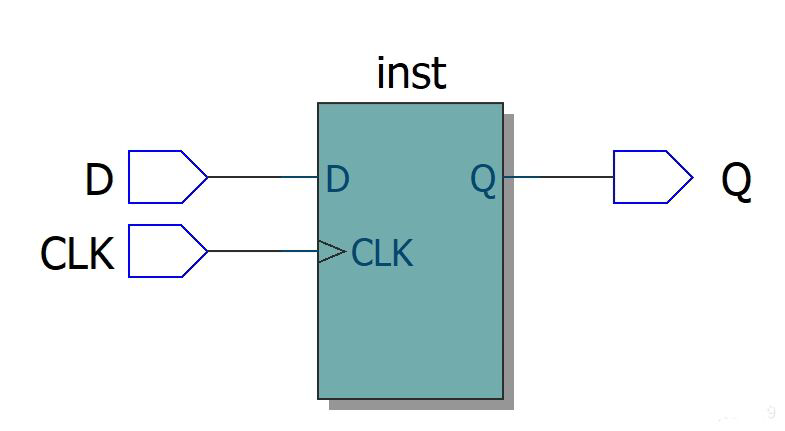
先编译再查看硬件电路图
4.创建VWF文件
同上
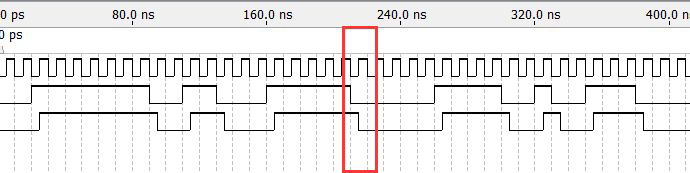
5.波形仿真
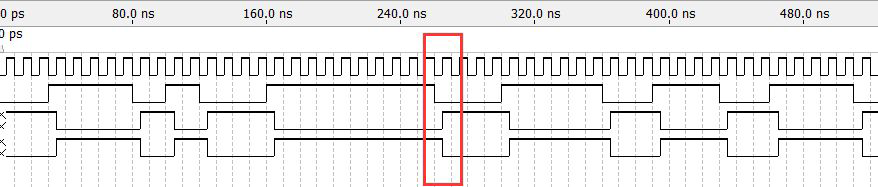
功能仿真(半个时钟的延迟)
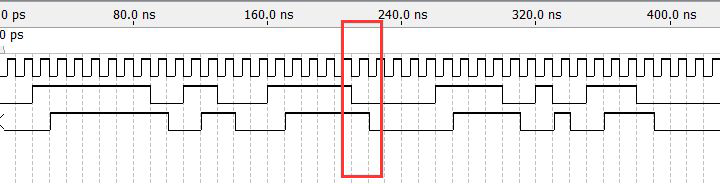
时序仿真(一个时钟的延迟)
四、总结
相较于第二部分,来说,使用现有的D触发器会更加方便,绘图少,但是对于D触发器的内部结构来说不太清楚,最后仿真出来的结果也是一样的。
参考链接
https://blog.csdn.net/ssj925319/article/details/115355019?spm=1001.2014.3001.5502
https://blog.csdn.net/qq_43279579/article/details/115286467
最后
以上就是天真枫叶最近收集整理的关于数字电路基础与Quartus-II入门一、D触发器二、在 Quartus-II 中自己用门电路设计一个D触发器,并进行仿真,时序波形验证三、在 Quartus-II 中直接调用一个D触发器电路,进行仿真,时序波形验证四、总结的全部内容,更多相关数字电路基础与Quartus-II入门一、D触发器二、在内容请搜索靠谱客的其他文章。







![[转] 串、并行加法器](https://www.shuijiaxian.com/files_image/reation/bcimg11.png)
发表评论 取消回复