文章目录
- Arduino 麦克纳姆轮
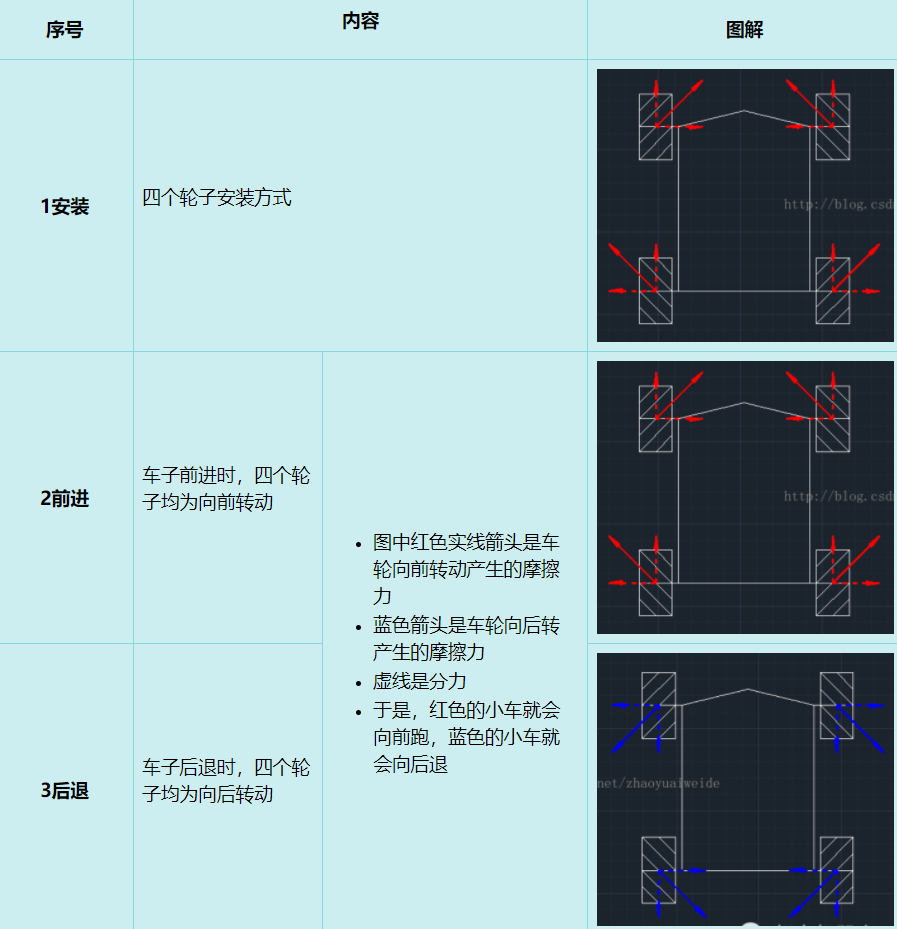
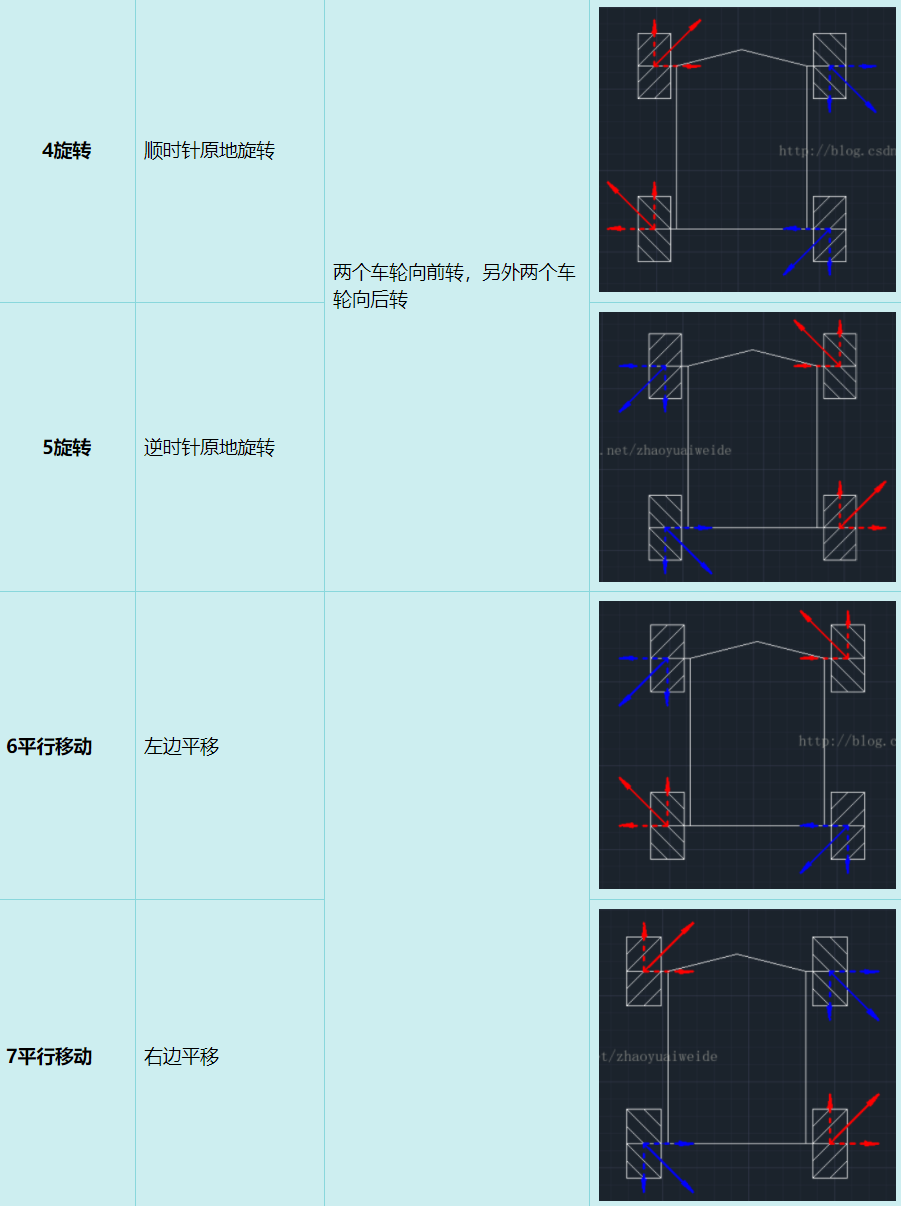
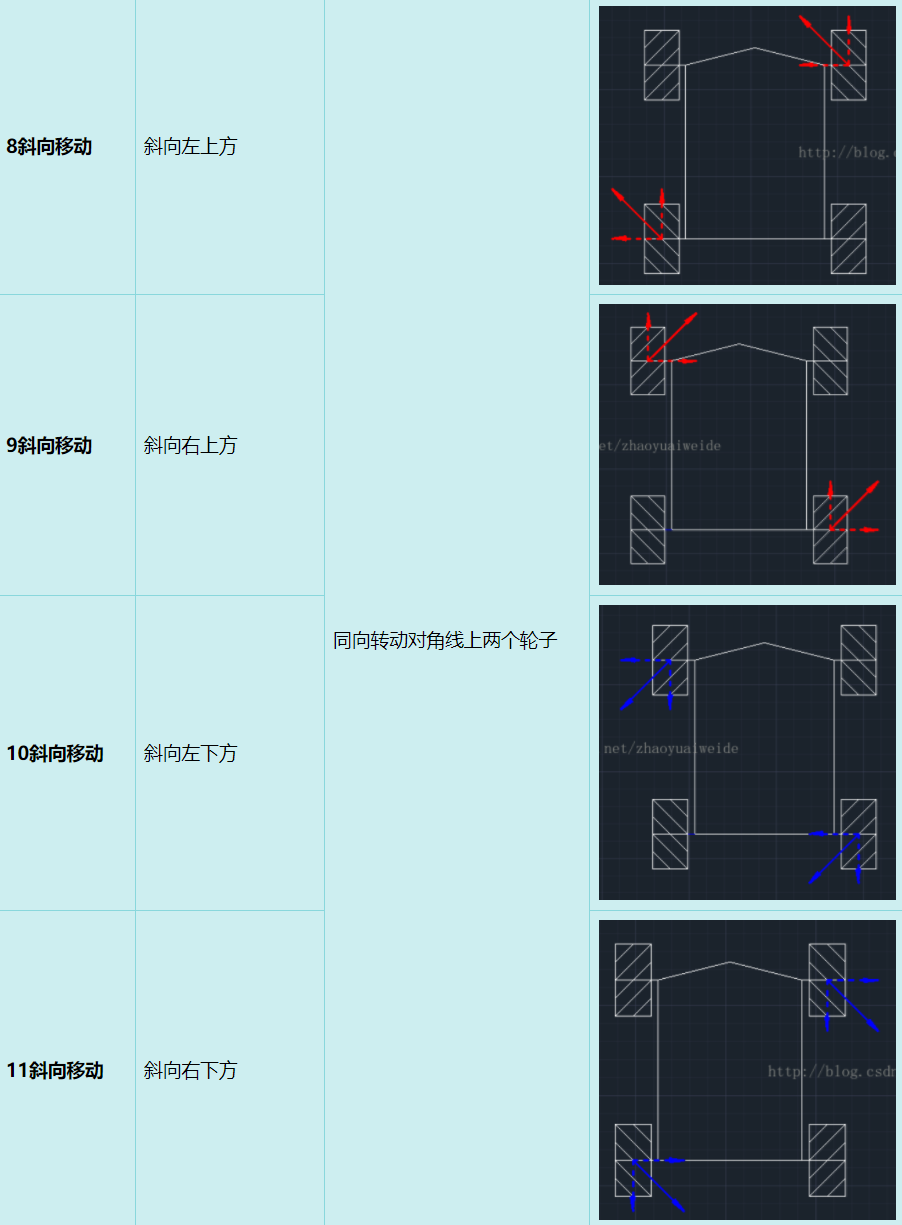
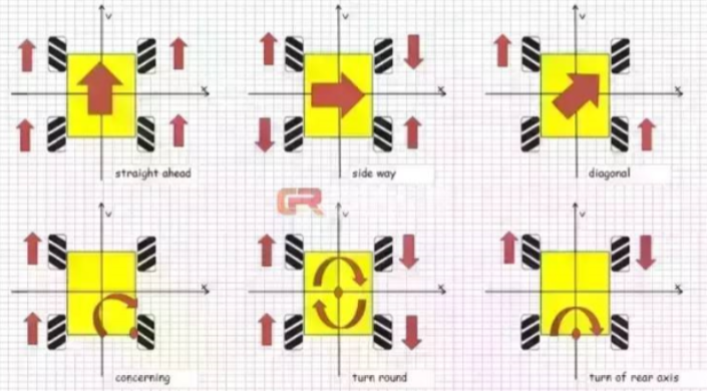
- 麦克纳姆轮全向移动原理【已整理】
- 麦轮测试程序 Arduino UNO+L298N
- 带红外控制程序 Arduino UNO+L298N+红外
其他链接:
【UGV】Mec 麦轮版小车驱动程序示例
【UGV】Mec 麦轮版小车结合角度传感器实现直线行走示例
【UGV】小车一些图片 麦轮版小车
【控制】麦轮小车动力学模型分析
Arduino 麦克纳姆轮
麦克纳姆轮全向移动原理【已整理】

麦轮测试程序 Arduino UNO+L298N
/************************************************************/
/********硬件:Arduino UNO + L298N电机驱动两个********/
/************************************************************/
int L1_IN1 = 7;int L1_IN2 = 5;int L1_ENA = 6;//左前轮
int R1_IN1 = 4;int R1_IN2 = 2;int R1_ENA = 3;//右前轮
int L2_IN1 = 12;int L2_IN2 = 13;int L2_ENA = 11;//左后轮
int R2_IN1 = 8;int R2_IN2 = 9;int R2_ENA = 10;//右后轮
void setup() {
// put your setup code here, to run once:
pinMode(L1_IN1, OUTPUT);pinMode(L1_IN2, OUTPUT);pinMode(L1_ENA, OUTPUT);
pinMode(R1_IN1, OUTPUT);pinMode(R1_IN2, OUTPUT);pinMode(R1_ENA, OUTPUT);
pinMode(L2_IN1, OUTPUT);pinMode(L2_IN2, OUTPUT);pinMode(L2_ENA, OUTPUT);
pinMode(R2_IN1, OUTPUT);pinMode(R2_IN2, OUTPUT);pinMode(R2_ENA, OUTPUT);
}
void L1_forward(int sp)//左前轮前进
{
digitalWrite(L1_IN1,LOW);
digitalWrite(L1_IN2,HIGH);
analogWrite(L1_ENA,sp);
}
void R1_forward(int sp)//右前轮前进
{
digitalWrite(R1_IN1,HIGH);
digitalWrite(R1_IN2,LOW);
analogWrite(R1_ENA,sp);
}
void L2_forward(int sp)//左后轮前进
{
digitalWrite(L2_IN1,HIGH);
digitalWrite(L2_IN2,LOW);
analogWrite(L2_ENA,sp);
}
void R2_forward(int sp)//右后轮前进
{
digitalWrite(R2_IN1,HIGH);
digitalWrite(R2_IN2,LOW);
analogWrite(R2_ENA,sp);
}
void allstop()
{
digitalWrite(L1_IN1,LOW);
digitalWrite(L1_IN2,LOW);
digitalWrite(R1_IN1,LOW);
digitalWrite(R1_IN2,LOW);
digitalWrite(L2_IN1,LOW);
digitalWrite(L2_IN2,LOW);
digitalWrite(R2_IN1,LOW);
digitalWrite(R2_IN2,LOW);
}
void L1_backward(int sp)//左前轮后退
{
digitalWrite(L1_IN1,HIGH);
digitalWrite(L1_IN2,LOW);
analogWrite(L1_ENA,sp);
}
void R1_backward(int sp)//右前轮后退
{
digitalWrite(R1_IN1,LOW);
digitalWrite(R1_IN2,HIGH);
analogWrite(R1_ENA,sp);
}
void L2_backward(int sp)//左后轮后退
{
digitalWrite(L2_IN1,LOW);
digitalWrite(L2_IN2,HIGH);
analogWrite(L2_ENA,sp);
}
void R2_backward(int sp)//右后轮后退
{
digitalWrite(R2_IN1,LOW);
digitalWrite(R2_IN2,HIGH);
analogWrite(R2_ENA,sp);
}
void loop() {
// put your main code here, to run repeatedly:
/*前进*/
L1_forward(100);
R1_forward(100);
L2_forward(100);
R2_forward(100);
delay(1500);
allstop();
delay(1500);
/*后退*/
L1_backward(100);
R1_backward(100);
L2_backward(100);
R2_backward(100);
delay(1500);
allstop();
delay(1500);
/*顺时针原地旋转*/
L1_forward(200);
R1_backward(200);
L2_forward(200);
R2_backward(200);
delay(1500);
allstop();
delay(1500);
/*逆时针原地旋转*/
L1_backward(200);
R1_forward(200);
L2_backward(200);
R2_forward(200);
delay(1500);
allstop();
delay(1500);
/*左边平移*/
L1_backward(150);
R1_forward(150);
L2_forward(150);
R2_backward(150);
delay(1500);
allstop();
delay(1500);
/*右边平移*/
L1_forward(150);
R1_backward(150);
L2_backward(150);
R2_forward(150);
delay(1500);
allstop();
delay(1500);
/*斜向左上方*/
R1_forward(150);
L2_forward(150);
delay(1500);
allstop();
delay(1500);
/*斜向右上方*/
L1_forward(150);
R2_forward(150);
delay(1500);
allstop();
delay(1500);
/*斜向左下方*/
L1_backward(150);
R2_backward(150);
delay(1500);
allstop();
delay(1500);
/*斜向右下方*/
R1_backward(150);
L2_backward(150);
delay(1500);
allstop();
delay(1500);
}
带红外控制程序 Arduino UNO+L298N+红外
#include <IRremote.h>
/*定义红外接收管接线引脚*/
int RECV_PIN = 11;//定义红外接收引脚号
IRrecv irrecv(RECV_PIN);
decode_results results;//解码结果放在decode results结构的result中
/*定义电机驱动接线引脚*/
int L1_IN1 = 44; int L1_IN2 = 42; int L1_ENA = 7;//左前轮
int R1_IN1 = 40; int R1_IN2 = 38; int R1_ENA = 6;//右前轮
int L2_IN1 = 52; int L2_IN2 = 50; int L2_ENA = 5;//左后轮
int R2_IN1 = 48; int R2_IN2 = 46; int R2_ENA = 4;//右后轮
void setup()
{
// put your setup code here, to run once:
pinMode(L1_IN1, OUTPUT);pinMode(L1_IN2, OUTPUT);pinMode(L1_ENA, OUTPUT);
pinMode(R1_IN1, OUTPUT);pinMode(R1_IN2, OUTPUT);pinMode(R1_ENA, OUTPUT);
pinMode(L2_IN1, OUTPUT);pinMode(L2_IN2, OUTPUT);pinMode(L2_ENA, OUTPUT);
pinMode(R2_IN1, OUTPUT);pinMode(R2_IN2, OUTPUT);pinMode(R2_ENA, OUTPUT);
Serial.begin(9600);
// In case the interrupt driver crashes on setup, give a clue
// to the user what's going on.
Serial.println("Enabling IRin");
irrecv.enableIRIn(); // 启动接收器
Serial.println("Enabled IRin");
}
void loop()
{
if (irrecv.decode(&results))
{
Serial.print("HEX格式 》》 ");
Serial.println(results.value,HEX);//以16进制换行输出接收代码
Serial.print("默认格式 》》 ");
Serial.println(results.value);
if (results.value == 0xFF30CF) //1键为前进键
{
L1_forward(100);
R1_forward(100);
L2_forward(100);
R2_forward(100);
}
else if (results.value == 0xFF18E7) //2键为后退键
{
L1_backward(100);
R1_backward(100);
L2_backward(100);
R2_backward(100);
}
else if (results.value == 0xFF7A85) //3键为左边平移键
{
L1_forward(150);R1_backward(150);
L2_forward(150);R2_backward(150);
}
else if (results.value == 0xFF10EF) //4键为右边平移键
{
L1_backward(150);R1_forward(150);
L2_backward(150);R2_forward(150);
}
else if (results.value == 0xFF38C7) //5键为顺时针原地旋转键
{
L1_backward(150);R1_forward(150);
L2_forward(150); R2_backward(150);
}
else if (results.value == 0xFF5AA5) //6键为逆时针原地旋转键
{
L1_forward(150); R1_backward(150);
L2_backward(150);R2_forward(150);
}
else if (results.value == 0xFF4AB5) //8键为原地画数字8键
{
//前
L1_forward(100); R1_forward(100);
L2_forward(100); R2_forward(100);
delay(500);
allstop();
delay(500);
//右
L1_backward(150);R1_forward(150);
L2_backward(150);R2_forward(150);
delay(800);
allstop();
delay(500);
//前
L1_forward(100); R1_forward(100);
L2_forward(100); R2_forward(100);
delay(500);
allstop();
delay(500);
//左
L1_forward(150); R1_backward(150);
L2_forward(150); R2_backward(150);
delay(800);
allstop();
delay(500);
//后
L1_backward(100);R1_backward(100);
L2_backward(100);R2_backward(100);
delay(500);
allstop();
delay(500);
//右
L1_backward(150);R1_forward(150);
L2_backward(150);R2_forward(150);
delay(800);
allstop();
delay(500);
//后
L1_backward(100);R1_backward(100);
L2_backward(100);R2_backward(100);
delay(500);
allstop();
delay(500);
//左
L1_forward(150); R1_backward(150);
L2_forward(150); R2_backward(150);
delay(800);
allstop();
delay(500);
}
else if (results.value == 0xFF6897) //0键为停止键
{
allstop();Serial.println("allstop");
}
irrecv.resume(); // Receive the next value
Serial.println("-------");
}
delay(100);
}
void L1_forward(int sp)//左前轮前进
{
digitalWrite(L1_IN1,LOW);
digitalWrite(L1_IN2,HIGH);
analogWrite(L1_ENA,sp);
}
void R1_forward(int sp)//右前轮前进
{
digitalWrite(R1_IN1,HIGH);
digitalWrite(R1_IN2,LOW);
analogWrite(R1_ENA,sp);
}
void L2_forward(int sp)//左后轮前进
{
digitalWrite(L2_IN1,HIGH);
digitalWrite(L2_IN2,LOW);
analogWrite(L2_ENA,sp);
}
void R2_forward(int sp)//右后轮前进
{
digitalWrite(R2_IN1,HIGH);
digitalWrite(R2_IN2,LOW);
analogWrite(R2_ENA,sp);
}
void allstop()
{
digitalWrite(L1_IN1,LOW);
digitalWrite(L1_IN2,LOW);
digitalWrite(R1_IN1,LOW);
digitalWrite(R1_IN2,LOW);
digitalWrite(L2_IN1,LOW);
digitalWrite(L2_IN2,LOW);
digitalWrite(R2_IN1,LOW);
digitalWrite(R2_IN2,LOW);
}
void L1_backward(int sp)//左前轮后退
{
digitalWrite(L1_IN1,HIGH);
digitalWrite(L1_IN2,LOW);
analogWrite(L1_ENA,sp);
}
void R1_backward(int sp)//右前轮后退
{
digitalWrite(R1_IN1,LOW);
digitalWrite(R1_IN2,HIGH);
analogWrite(R1_ENA,sp);
}
void L2_backward(int sp)//左后轮后退
{
digitalWrite(L2_IN1,LOW);
digitalWrite(L2_IN2,HIGH);
analogWrite(L2_ENA,sp);
}
void R2_backward(int sp)//右后轮后退
{
digitalWrite(R2_IN1,LOW);
digitalWrite(R2_IN2,HIGH);
analogWrite(R2_ENA,sp);
}
最后
以上就是仁爱香菇最近收集整理的关于【Arduino】麦克纳姆轮原理及驱动程序Arduino 麦克纳姆轮的全部内容,更多相关【Arduino】麦克纳姆轮原理及驱动程序Arduino内容请搜索靠谱客的其他文章。
本图文内容来源于网友提供,作为学习参考使用,或来自网络收集整理,版权属于原作者所有。








发表评论 取消回复