今天给大家分享下如何配置ABB机器人IO板,谢谢大家的支持!
I/O是 Input/Output的缩写,即输入输出端口,机器人可通过I/O与外部设备进行交互,例如:
数字量输入:各种开关信号反馈,如按钮开关,转换开关,接近开关等;传感器信号反馈,如光电传感器,光纤传感器;还有接触器,继电器触点信号反馈。
数字量输出:控制各种继电器线圈,如接触器,继电器,电磁阀;控制各种指示类信号,如指示灯,蜂鸣器。
ABB机器人的标准I/O板的输入输出都是PNP类型。
ABB常用的标准I/O板很多,例如DSQC651、DSQC652、DSQC653、DSQC377A等,都是根据机器人需要做什么工作,配置所需的通信模块,下面以最常见的DSQC652板进行配置说明,了解到信号是如何配置的。
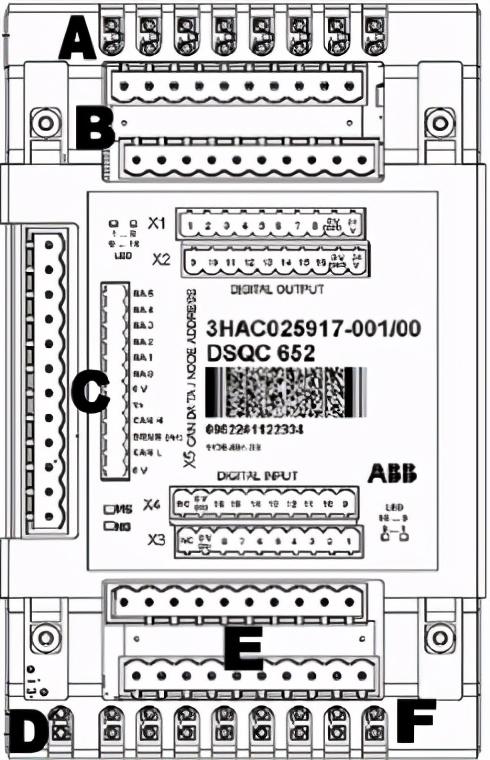
DSQC652版提供16个数字输入信号和16个数字输出信号。由于ABB标准I/O板是挂在DeviceNet网络上的,所以要设定模块在网络上的地址。端子X5的6~12的跳线用于决定模块的地址,地址可用范围为10~63。DSQC652的板由于机器人出厂时,已经把8脚和第10脚剪去,从而得到10的地址(二进制)
下面就如何配置652板为例,做一个详细的说明,供初学者参考:
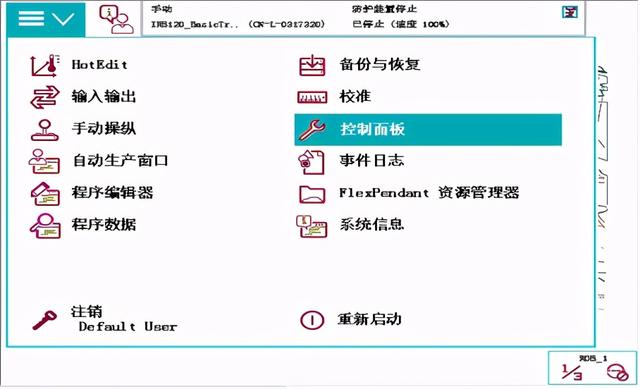
通过“菜单键”,选择“控制面板”
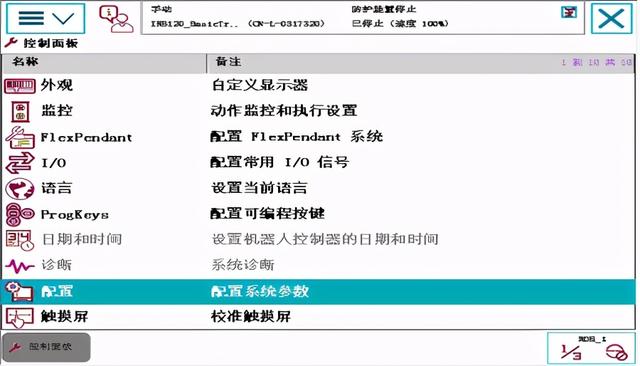
选择“配置”
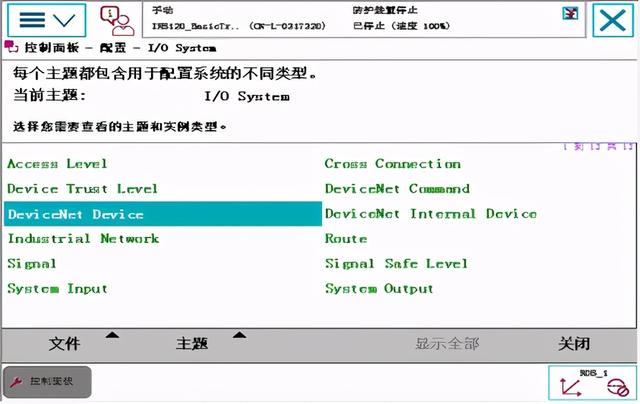
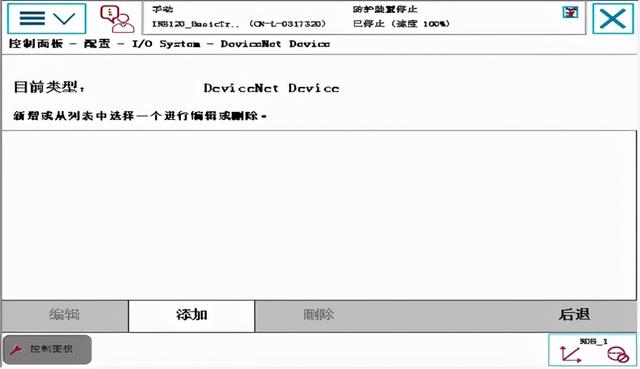
双击“DeviceNet Device”
点击“添加”
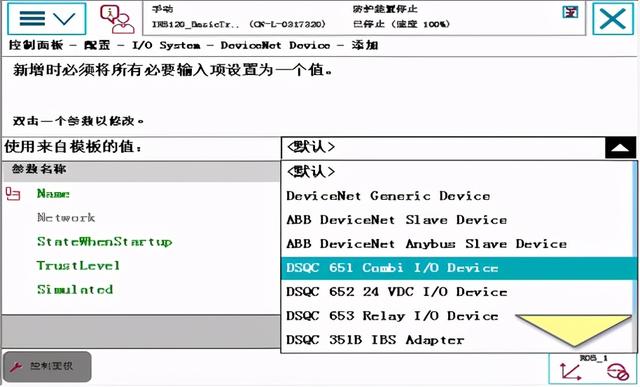
选择“DSQC652 24VDC I/O Device”
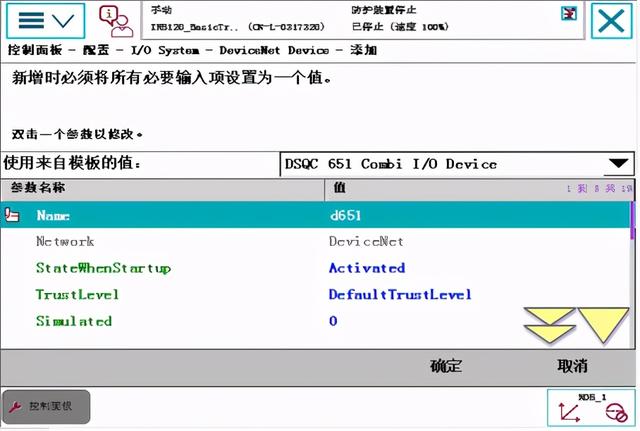
将“Name”改为“d652”或者以地址“board10”命名
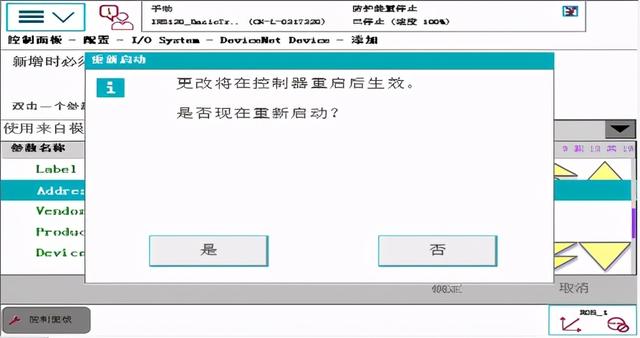
向下翻页,找到“Address”设定值为“10”
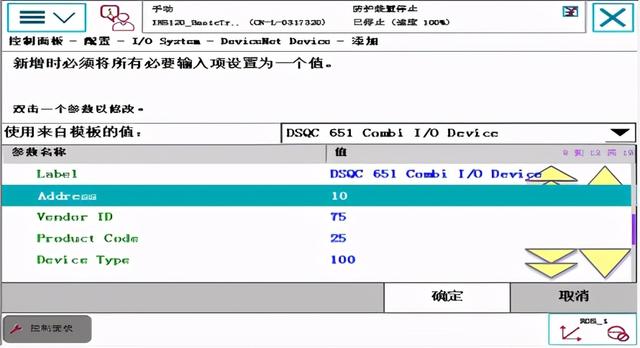
点击“是” DSQC652板定义完成。
最后感谢大家的支持,欢迎转发关注,我会持续更新ABB相关知识,敬请期待
最后
以上就是英勇月光最近收集整理的关于abb机器人负载配置设定_一步一步教你配置ABB机器人IO板,给初学者参考的全部内容,更多相关abb机器人负载配置设定_一步一步教你配置ABB机器人IO板内容请搜索靠谱客的其他文章。








发表评论 取消回复