ABB机器人的系统I/O功能可以指定具体的系统输入输出项,将I/O信号与机器人系统的一些特殊功能相关联,从而使信号实现某些特殊功能。使得我们不需要通过示教器或者其它硬件就可以对机器人进行某种控制和监控机器人系统的状态。比如系统输入中的Start可用于机器人的启动控制,系统输出中的CycleOn可用机器人是否正在运行的监控。那么这一次我们就来一起看一下ABB机器人中常用的System I/O的功能。
配置步骤:
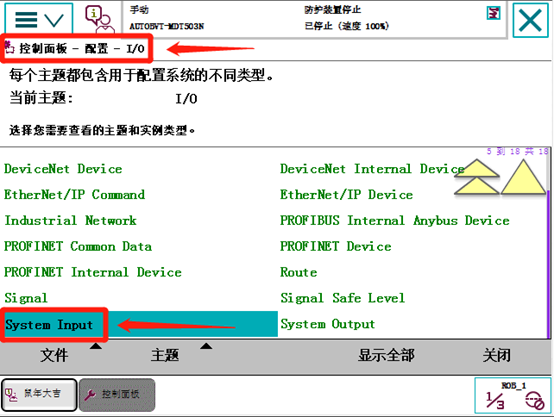
控制面板→配置→I/O主题→System Input
选择添加

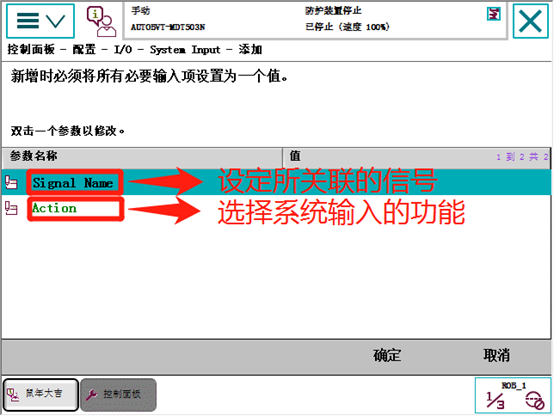
进行SignalName与Action值的设定。
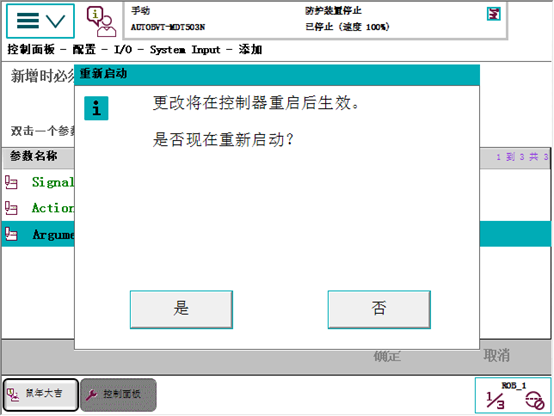
点击确定后会提示是否重启机器人,可根据需要灵活选择现在立即重启或者在一起完成其它配置后手动进行重启。
到这里系统输入信号的配置流程演示就完成了,系统输入的其它功能的配置流程与系统输出的配置流程也与之相似,这里不再演示。
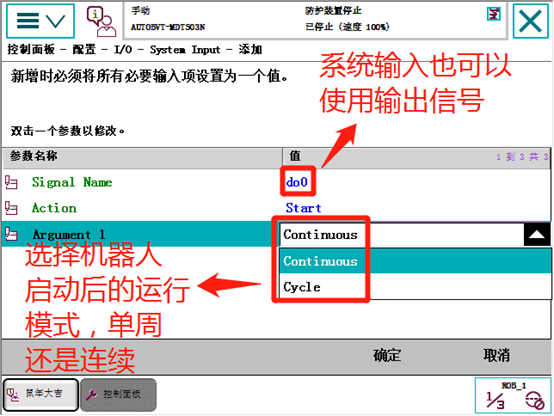
在实际应用中,Start信号应该使用Input类型信号进行关联,上边我为了演示系统输出也可以使用Output类型信号进行关联故使用了do0信号。具体使用什么信号可以根据现场的实际情况来灵活配置。下面我们就来看ABB机器人为我们提供的其它的系统I/O信号的值的含义。
系统输入信号
| 信号值 | 信号值含义 |
| Backup | 机器人执行备份操作 |
| Disable Backup | 禁止机器人备份 |
| Enable Energy Saving | 使控制器进入节能状态 |
| Interrupt | 机器人执行一次中断程序 |
| Limit Speed | 限制机器人运行速度 |
| Load | 载入程序文件 |
| Load and Start | 载入程序文件并且启动 |
| Motors Off | 电机下电 |
| Motors On | 电机上电 |
| Motors On and Start | 电机上电并且启动 |
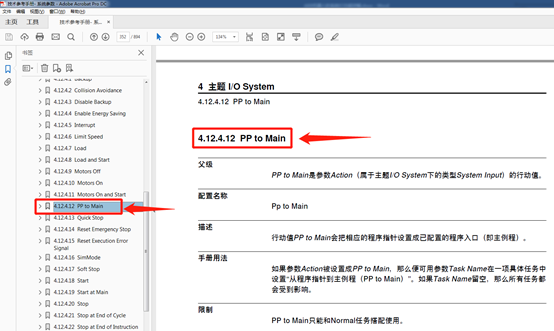
| PP to Main | 程序指针移至主程序 |
| Quick Stop | 快速停止 |
| Reset Emergency Stop | 急停复位 |
| Reset Execution Error Signal | 执行错误信号复位 |
| SimMode | 机器人进入模拟状态 |
| Soft Stop | 缓停止 |
| Start | 机器人启动 |
| Start at Main | 从主程序启动 |
| Stop | 机器人停止 |
| Stop at End of Cycle | 在执行完当前循环后停止 |
| Stop at End of Instruction | 在执行完当前指令后停止 |
| System Restart | 复位系统运行状态 |
| Write Access | 请求写权限 |
系统输出信号:
| Absolute Accuracy Active | 绝对精度已启用 |
| Auto On | 机器人在自动模式 |
| Backup Error | 备份错误 |
| Backup in progress | 正在备份 |
| CPU Fan not Running | 风扇转动不正常 |
| Emergency Stop | 机器人处于急停状态 |
| Energy Saving Blocked | 机器人正处于节能状态 |
| Execution Error | 机器人执行发生错误 |
| Limit Speed | 机器人处于限速状态 |
| Mechanical Unit Active | 机械单元已激活 |
| Mechanical Unit Not Moving | 机械单元处于停止状态,未移动 |
| Motion Supervision Triggered | 动作监控触发 |
| Motion Supervision On | 动作监控启用 |
| Motors Off | 安全链未关闭机器人电机关闭脉 |
| Motors On | 机器人电机开启但处于保护停止状态 |
| Motors Off State | 机器人电机关闭 |
| Motors On State | 机器人电机开启 |
| Path Return Region Error | 机器人离编程路径太远 |
| Power Fail Error | 上电失败程序无法启动 |
| Production Execution Error | 程序执行、碰撞、系统错误 |
| Robot Not On path | 机器人停止后离编程路径太远 |
| Run Chain OK | 运行链正常 |
| SimMode | 机器人已进入模拟状态 |
| Simulated I/O | I/O信号处于模拟状态 |
| SMB Battery Charge Low | SMB电池即将耗尽 |
| System Input Busy | 系统输入繁忙 |
| TaskExecuting | 任务正在执行 |
| TCP Speed | TCP当前的实际速度 |
| TCP Speed Reference | TCP当前的编程速度 |
| Temperature Warning | 温度报警 |
| Write Access | 相关I/O客户端拥有写权限 |
上述功能汇总整理基于RobotWare6.07,其它版本的RobotWare功能可能会略有增删。由于篇幅限制,信号的详细功能请查阅ABB机器人随机光盘中所的“技术参考手册- 系统参数.pdf”,手册中对信号的作用与区别有更加详细的解释。没有随机光盘的小伙伴可以点击下方的下载链接进行下载。
点我下载ABB机器人随机光盘
文章首发自动化生产之家
最后
以上就是风中宝贝最近收集整理的关于ABB机器人的系统IO功能详解的全部内容,更多相关ABB机器人内容请搜索靠谱客的其他文章。








发表评论 取消回复