想知道多更多资料请关注东莞机器人之家公众号。

对于ABB工业机器人,如果需要使用套接字通讯功能,需订购其616—1 pc interface 系统选项。
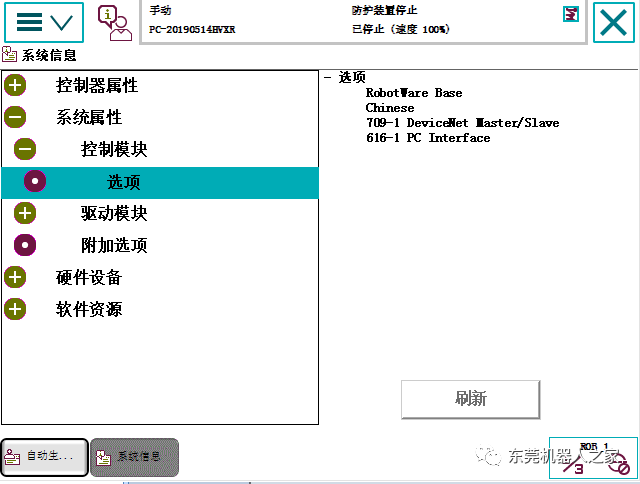
对于未配置该选项的机器人,无法使用套接字通讯功能。
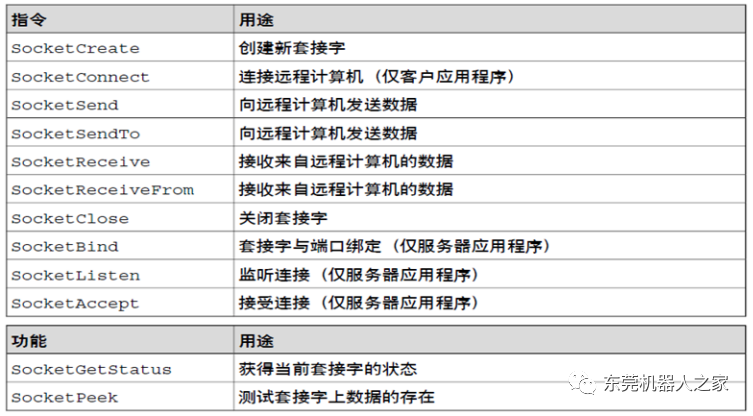
套接字通信所需的指令如下图:
机器人与相机视觉通讯一般机器人作为客户端client,相机作为服务端server。(也就是相机作主站,机器人作从站)
ABB机器人程序如下:
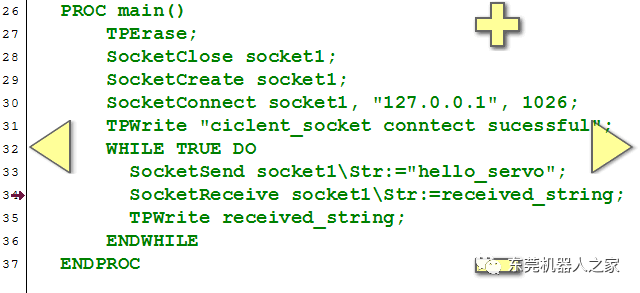
PROC main()
TPErase;
清屏指令
SocketClose socket1;
为了避免之前的连接没有关闭,先插入socketclose指令,后面的socket1为自己新建的socketdev类型的变量,
SocketCreate socket1;
创建新的套接字socket1
SocketConnect socket1, "127.0.0.1", 1026;
建立连接SocketConnect,后面需要指定Server的ip和端口,如果是在电脑和另一台虚拟控制器连接,ip设为“127.0.0.1”,端口自定义,建议不要用默认的1025.如果是真实的相机设置为真实的相机同一网段IP地址 。
TPWrite "ciclent_socket conntect sucessful";
此处做测试,在建立成功后,插入TPWrite指令,可以在示教器看到clinent_socket connect successful
WHILE TRUE DO
SocketSend socket1Str:="hello_servo";
接下去可以收发数据,此处示例为client先发送数据给server,再接受server发送回来的数据
SocketSend后面可以发送string或者byte数组,具体可以选择不同可选变量
发送完毕后,client接受到server发回的数据并写屏
SocketReceive socket1Str:=received_string;
TPWrite received_string;
ENDWHILE
ENDPROC
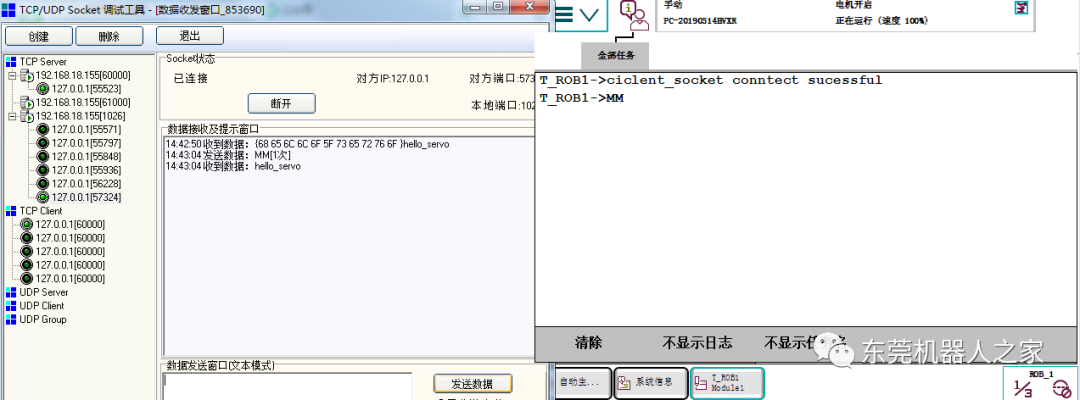
打开Socket调试工具,创建服务端Service,端口号1026与程序中设置的一致,测试成功如下图所示:
ABB机器人弧焊常用程序数据
ABB机器人总线篇之EtherNet/IP
ABB仿真软件Robotstudio手动单轴操作的三种方法
ABB机器人IO板卡和IO信号创建的步骤
号外!号外!中华人民共和国第一届职业技能大赛将在广东举行
ABB仿真软件Robotstudio基本操作
最后
以上就是优雅夕阳最近收集整理的关于abb机器人使用手册_ABB机器人与康耐视相机视觉通讯程序的全部内容,更多相关abb机器人使用手册_ABB机器人与康耐视相机视觉通讯程序内容请搜索靠谱客的其他文章。








发表评论 取消回复