个人理解 DSST 总体与kcf类似。 在位置计算的基础上添加了缩放尺度回归。其中位置的回归参考kcf
缩放尺度回归原理如下:
1.在原尺度框的大小为基础 1,向上乘以scale_factor 得到几个尺度,向下除以scale_factor得到几个尺度
2.每个尺度的图像都缩放到原尺度
3.对每个尺度做hog特征提取,假设hog特征为16*16*32 其中32位hog特征的维度,并拉升为一维 1x (16 *16 * 32)
最后得到的矩阵为 (16 * 16 * 32) x num_scale num_scale 为列数
4.将以上矩阵想象为 位置回归中的hog特征。则其余计算类似 ,注明:在与模板相关性的计算过程中,
最后输出的响应是 1 x num_scale
5.在响应中寻找最大值,则为对应的尺寸。
该算法与kcf相比,在计算量上多了多尺度的计算,故运算时间相差5-10倍左右。
相关滤波优化思路主要是 特征压缩,pca降维 ,性能会提升很多,效果会下降,主要根据实际场景来权衡了。
其次,浮点改定点性能会有提升,效果不变
以下内容转载至:http://blog.csdn.net/roamer_nuptgczx/article/details/50134633
基于相关滤波的跟踪算法近年来受到了较大的关注,其最初的代表作可以追溯到2010年CVPR的《Visual object tracking using adaptive correlation filters》,这篇paper提出了一种MOSSE correlation filter,并将其应用于视觉跟踪当中,取得了较好的效果。DSST算法基于MOSSE做了改进和拓展,实现了快速且准确的目标尺度评估,算法的总体效果表现不错。如果想要彻底理解DSST算法,最好认真读一读源码,作者提供的matlab代码写得清晰易懂,注释也很详细,通过读代码能够更加深入具体地了解其思想和实现细节,下面贴出我的总结PPT。
更新:
据测试,DSST在VOT2014 Benchmark中排名第一,在这里可以获取更多关于DSST的相关资料,包括完整版本和VOT版本的MATLAB源码等。
1/10 
2/10 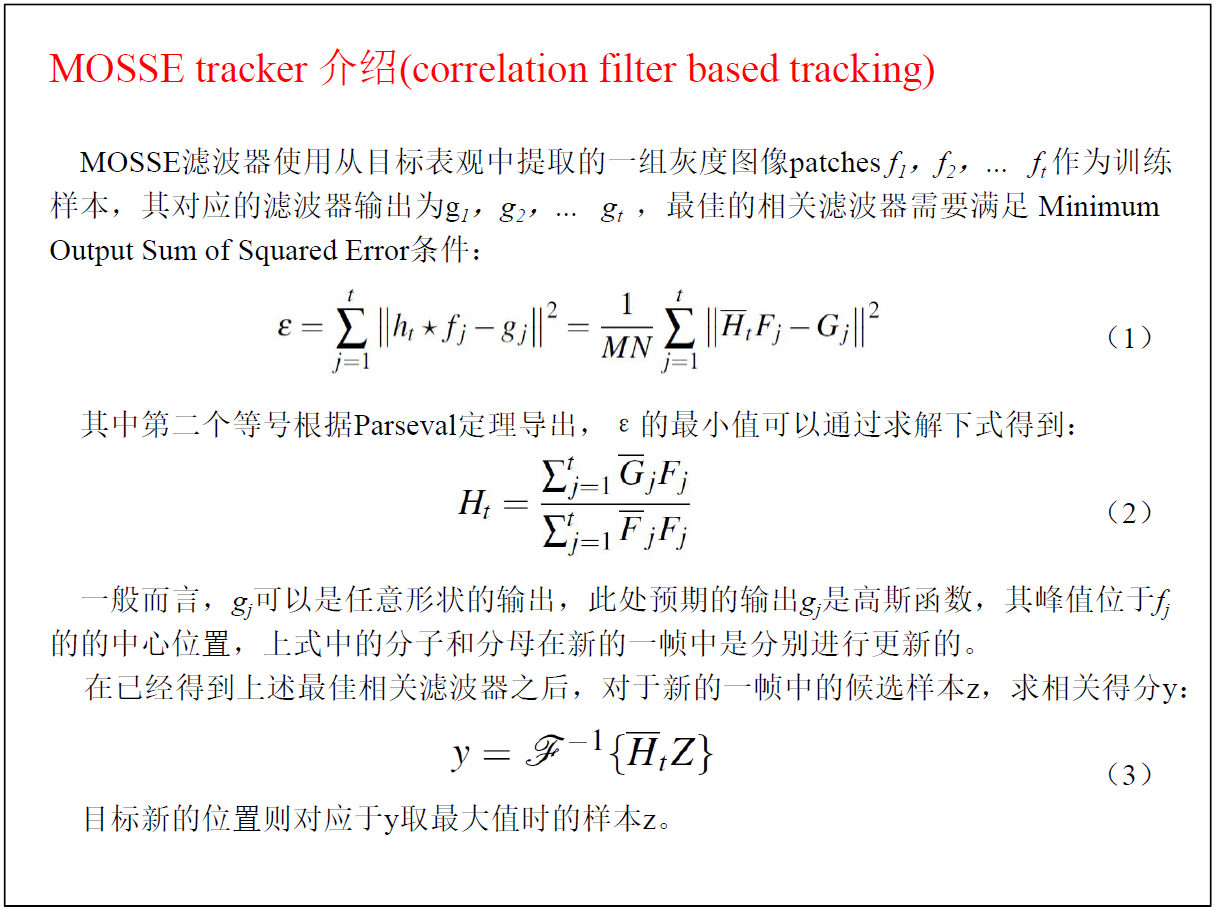
3/10 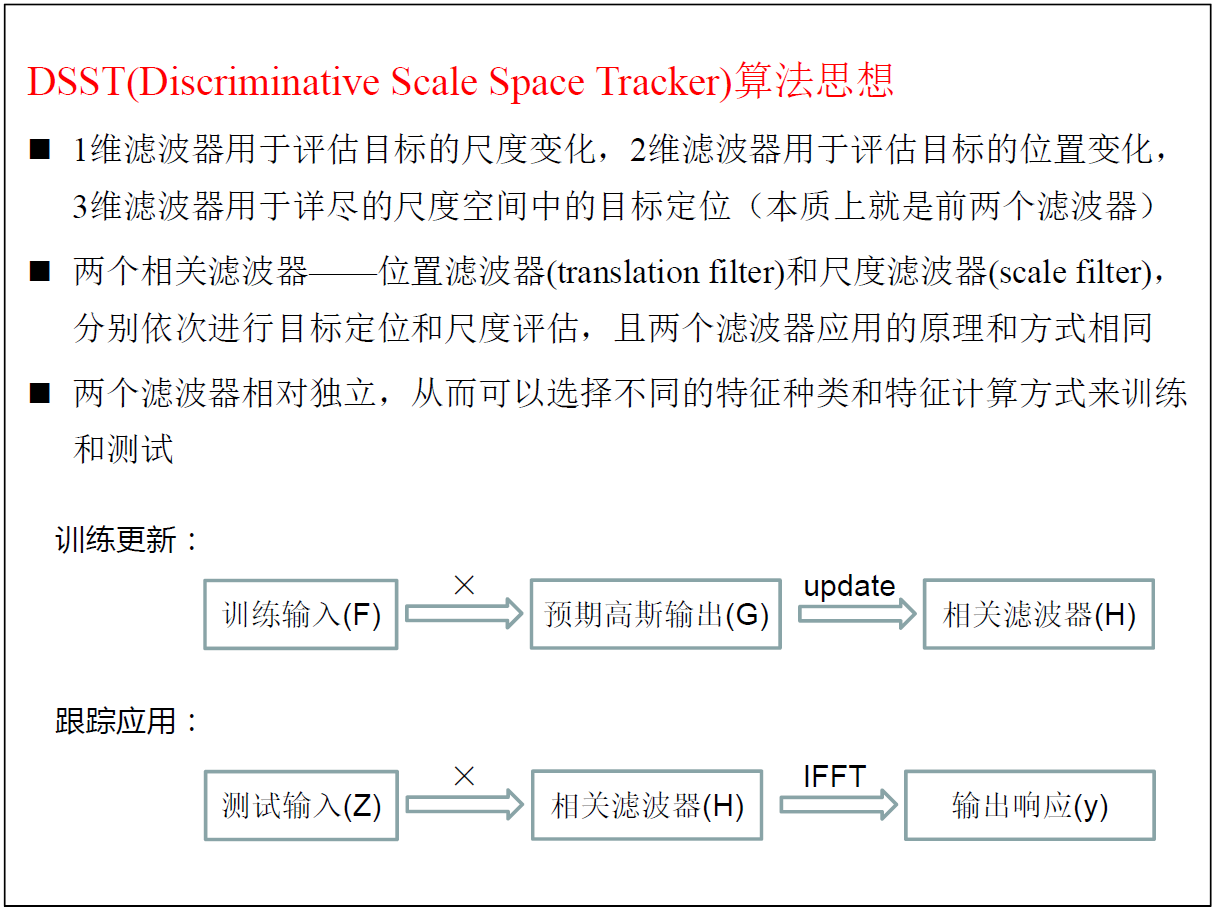
4/10 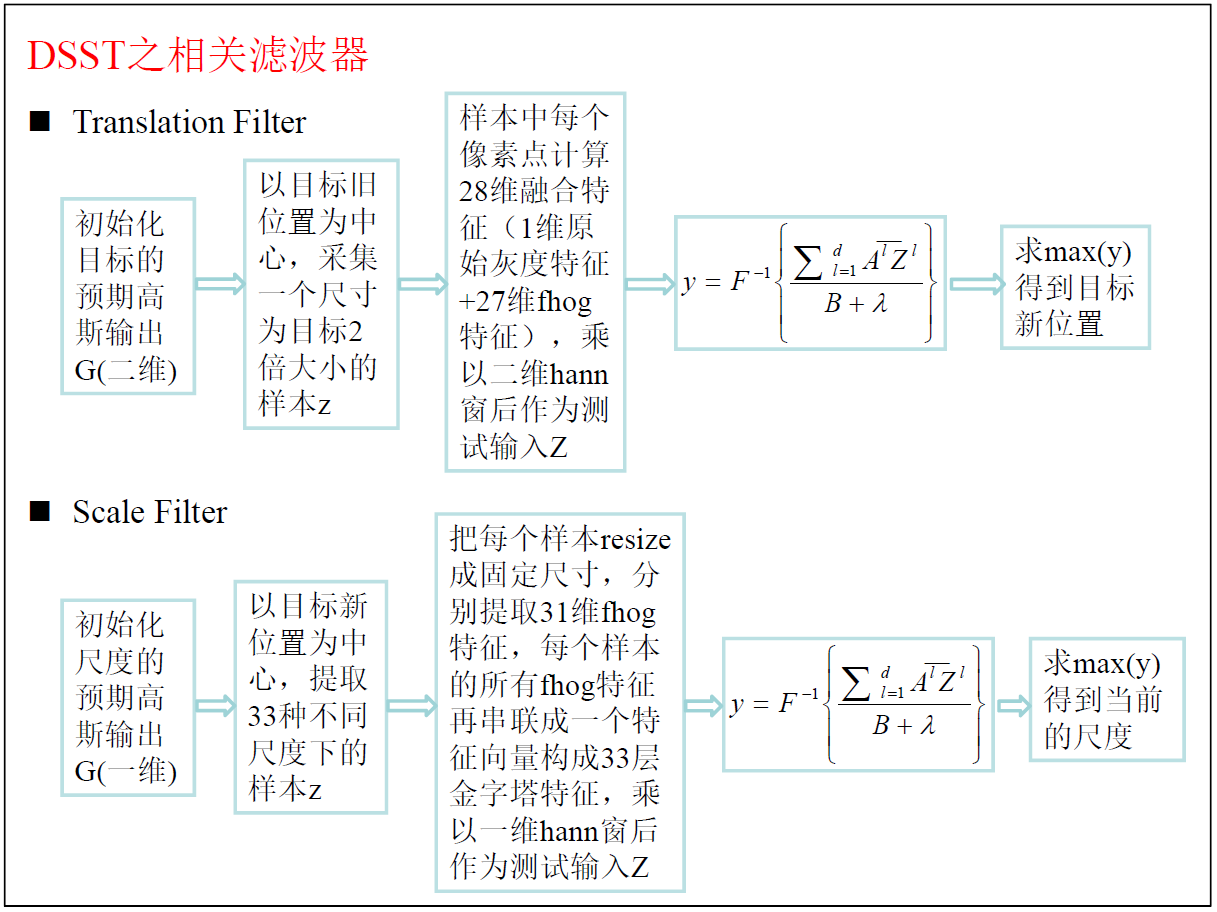
5/10 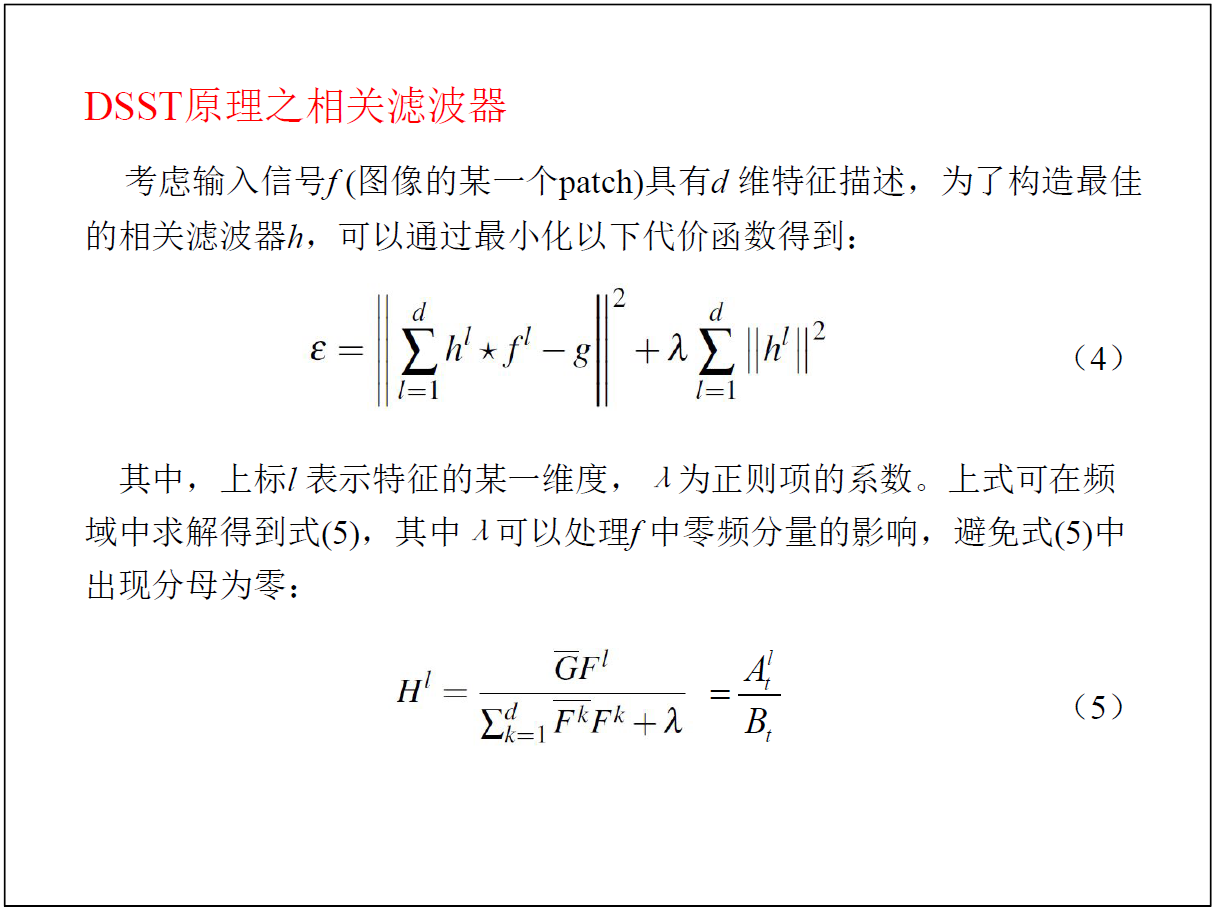
6/10 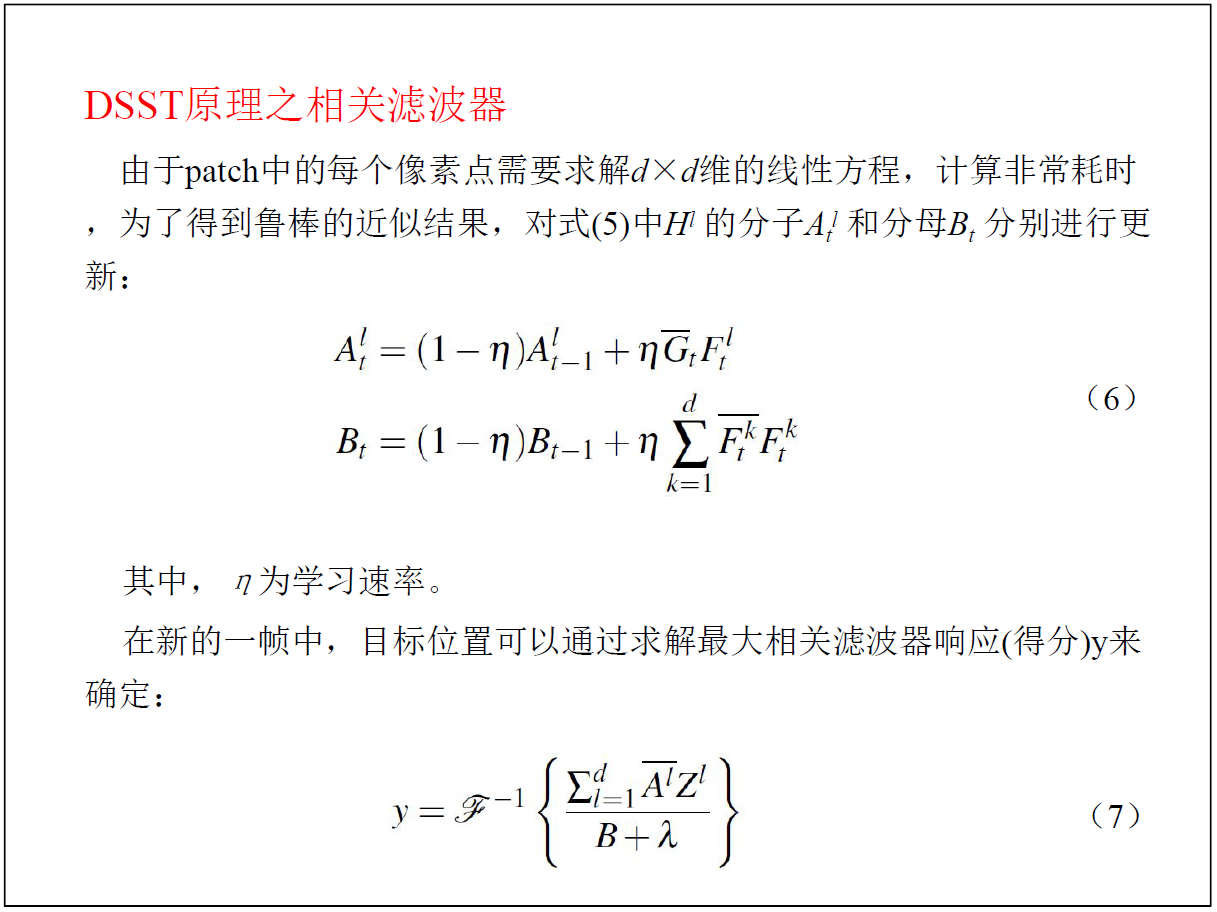
7/10 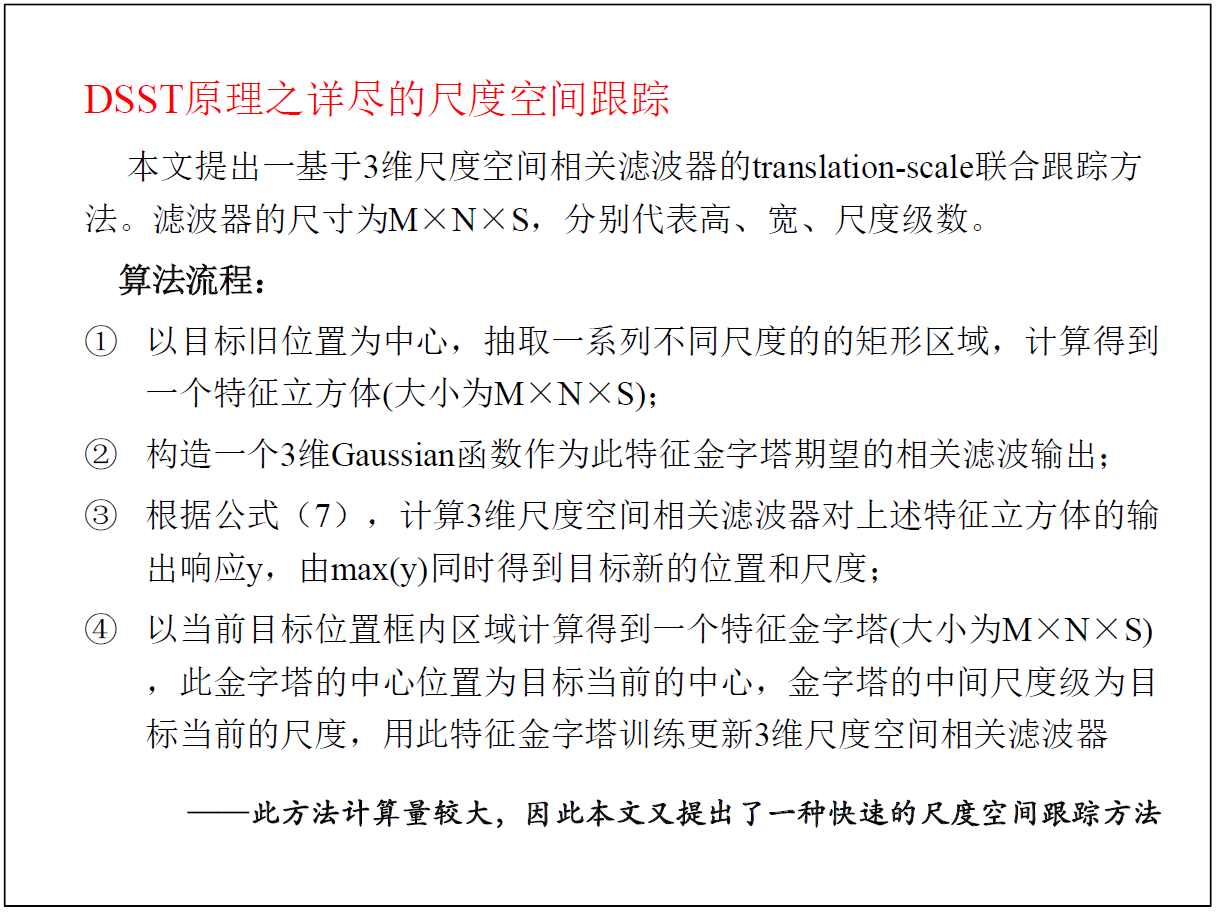
8/10 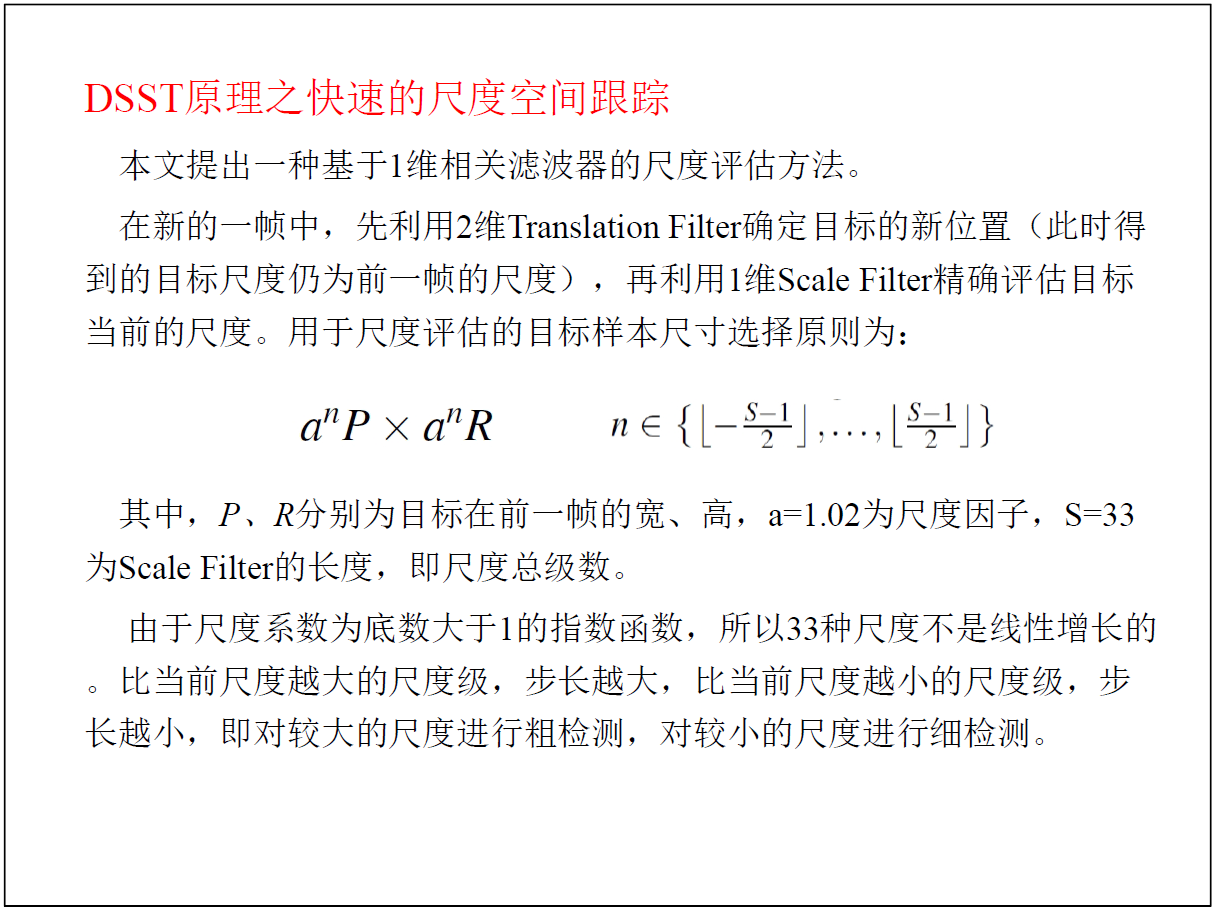
9/10 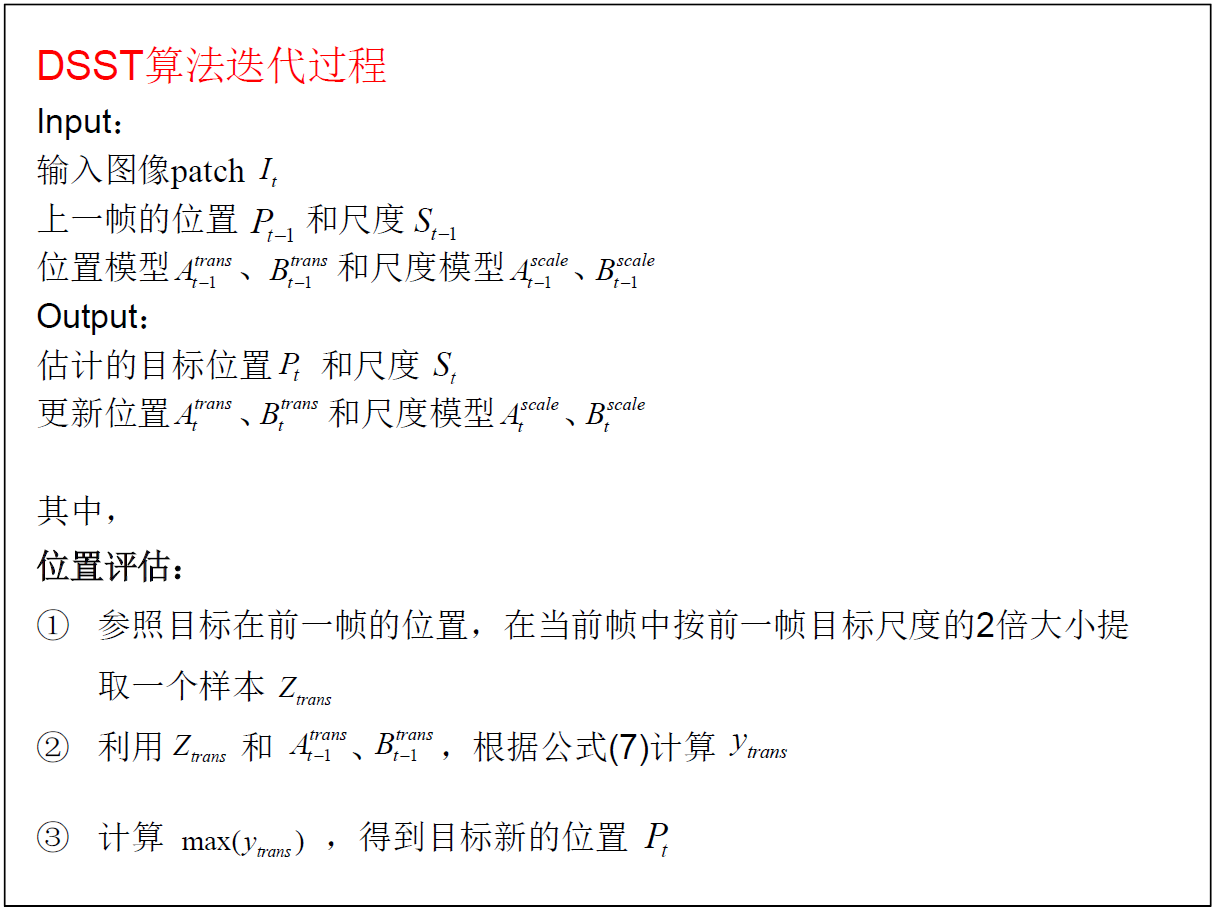
10/10 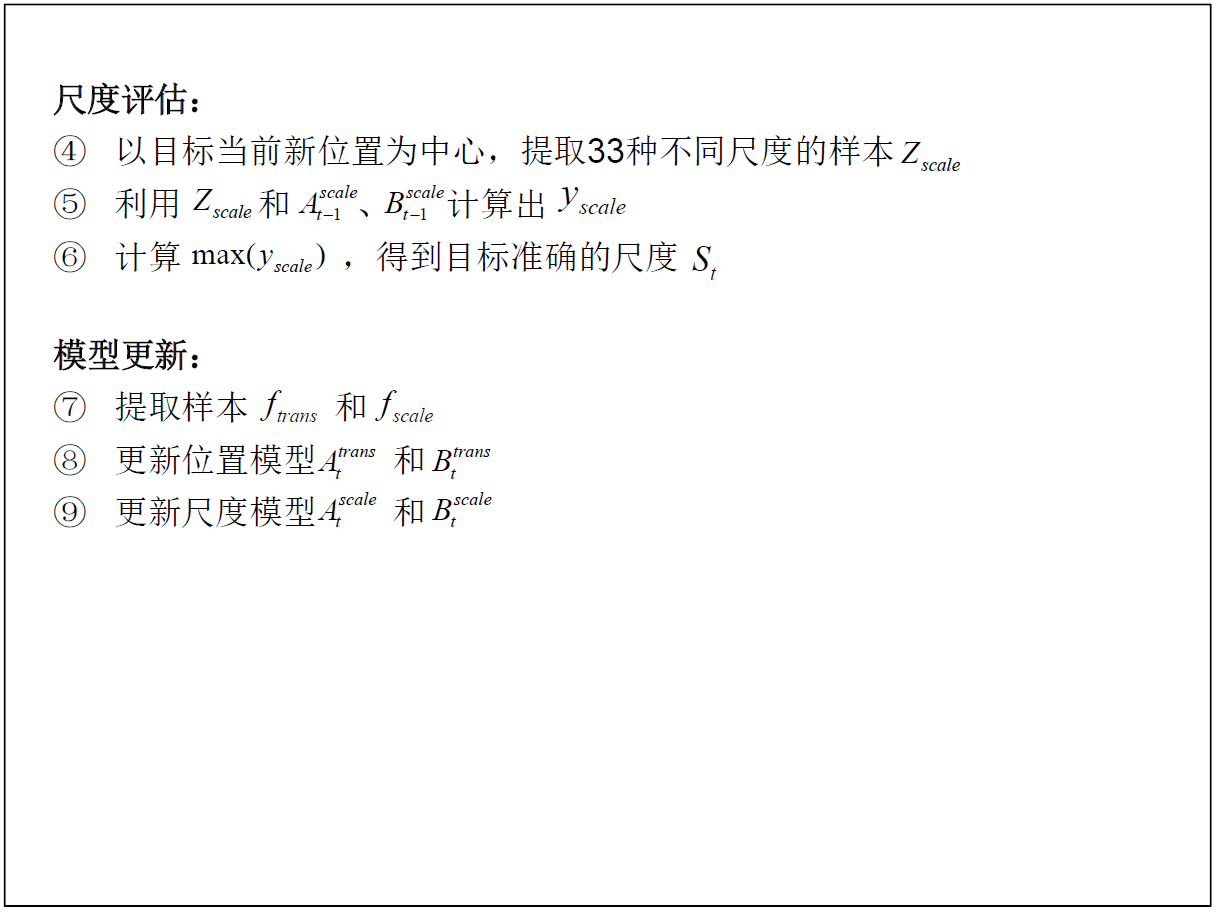
最后
以上就是爱听歌柜子最近收集整理的关于Accurate Scale Estimation for Robust Visual Tracking(DSST) 一些理解的全部内容,更多相关Accurate内容请搜索靠谱客的其他文章。








发表评论 取消回复