DSST算法也是基于KCF算法改的较好的一种。DSST(Accurate Scale Estimation for RobustVisual Tracking)是2015年BMVC(InProceedings of the British Machine Vision Conference)上的文章,并在2014VOT比赛中夺得了第一名,算法简洁,性能优良,可移植性高。之篇文章是基于MOSSE,KCF基础上的改进,主要有两个方面:(1)引入多特征融合机制,这个和SAMF算法一样,使用的特征为HOG+CN+灰度特征;(2)文中最大的创新点是对于尺度的改进。
(1)本文首先介绍了MOSSE算法的主要原理推导:

首先从目标中提取一系列的图像,记为f1f2,…,fn作为训练样本,其对应的滤波器响应值为一系列的高斯函数g1g2,…,gn,而目的就是找到满足最小均方差的最优滤波器。
根据Parseval定理可以得出,等式左侧是时间域的方程式,右侧是傅立叶域的方程式,将时域转化为频域进行求解可得。
转化在频域进行计算的优点是:在频域计算可以大大的加快运算效率,满足实时性的要求。在算出滤波器后,在新的一帧中逐步输入候选样本z,计算得分,选择最高分的位置即是目标的新位置。
(2)然后介绍了关于特征改进的思想:
文中提到的特征融合方法同SAMF一样,就是简单的将一维特征扩充到多维,l表示改变后特征的维度。文中提到可以进行融合的特征由HOG,CN,灰度特征。但是在实验环节中,考虑到实时性的原因,作者仅仅采用了HOG特征。
(3)尺度自适应的改进:
本文算法的核心部分是实现尺度自适应。作者提出三维滤波器,我第一次看的时候感觉很吓人,三维是什么……但是在实际上三维是由两部分组成的:一维维尺度滤波器;二维位置滤波器。这样就很好理解了,两个滤波器相互独立,这样可以更加的高效,方便于将尺度估计与其他算法相结合。也是本文的一大亮点。
原理图如下:
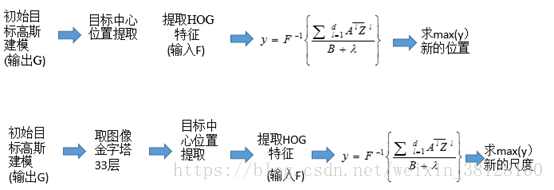
分两步进行计算,首先和KCF一样,用一个滤波器进行跟踪,得到目标的位置。然后在目标位置的基础上通过调整跟踪框的比例来找到响应值最大的尺度,从而在小范围内实现尺度自适应。这种算法的特点是可移植性强,分别进行目标位置估计与尺度估计,两个步骤不受任何影响,可以移植到其它算法中。

其中,P,R分别为目标在前一帧的宽高,a=1.02为尺度因子,S=33为尺度的数量。上述尺度不是线性关系,而是由精到粗(从内到外的方向)的检测过程。
最后进行了实验分析:简要介绍了系统的参数设置以及评估标准,由于考虑了算法的实时性,使用HOG特征进行试验分析对 论文地址:
http://219.216.82.193/cache/6/03/www.cvl.isy.liu.se/58feb2d936e8dad216dd39f7752908a7/ScaleTracking_BMVC14.pdf
代码地址:http://www.cvl.isy.liu.se/en/research/objrec/visualtracking/scalvistrack/index.html
最后
以上就是优雅小丸子最近收集整理的关于DSST目标跟踪算法的全部内容,更多相关DSST目标跟踪算法内容请搜索靠谱客的其他文章。








发表评论 取消回复