本文部分素材来自Rick Hill的网络教程System Dynamics and Control第10和第11节,请支持原作者。
https://www.youtube.com/watch?v=h73CudC0FQo&list=PL4VMBEQr3gMG7x97VfO8skq2k-52GCTMZ&index=2www.youtube.com一阶系统的基本性质
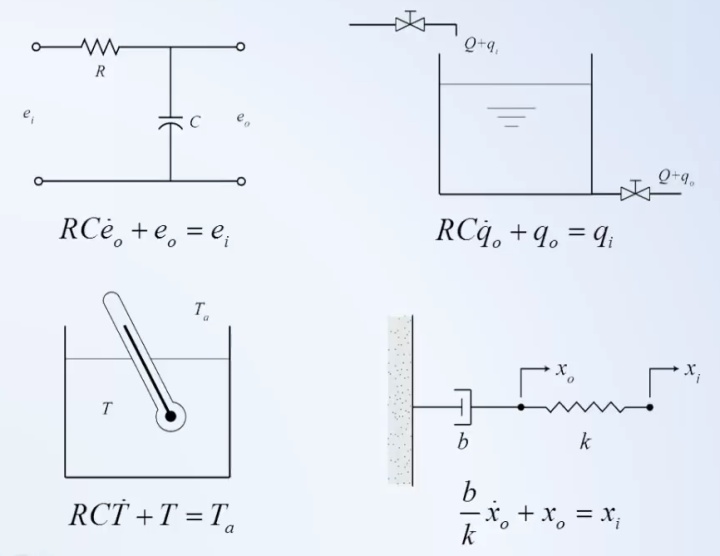
一阶系统的标准形式(canonical form):
一阶系统的传递函数 TF:
关键参数:
一阶系统的阶跃响应(时域分析)
对于传递函数为
的一阶系统,当输入型号为阶跃函数
时,
其时域表达式为
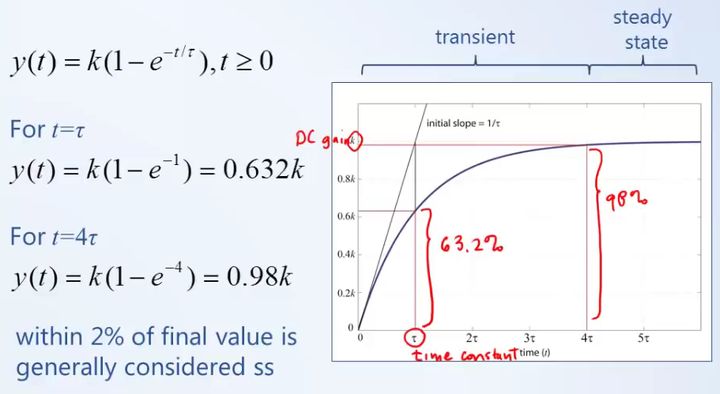
通过观察一阶系统输出信号的
二阶系统的基本性质
二阶系统的标准形式(canonical form):
二阶系统的传递函数 TF:
关键参数:
极点是使传递函数趋于无穷的s,根据
可得
极点=
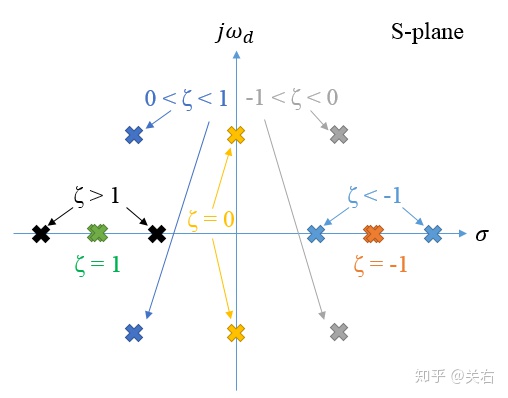
二阶系统极点包含实部与虚部两部分,
二阶系统稳定(无论是渐近稳定或是BIBO稳定)的前提是极点都位于负(左)半平面。
对于极点分布在左半平面的情况(
另外,自然频率
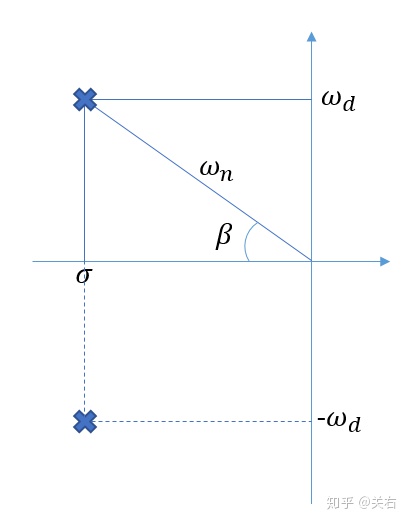
另外有
二阶系统的欠阻尼阶跃响应(时域分析)
对于传递函数为
的二阶系统,当输入型号为阶跃函数
时。
其时域表达式为
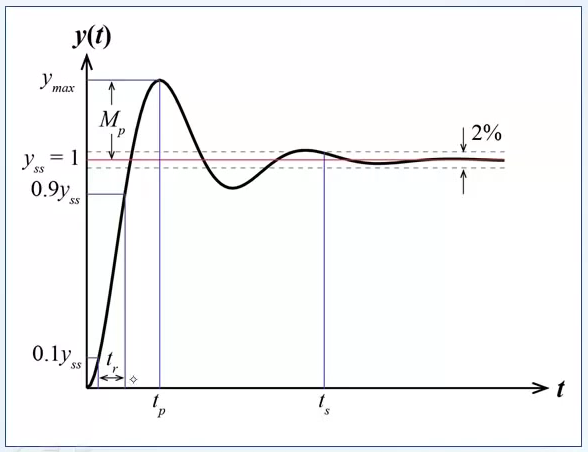
定义:
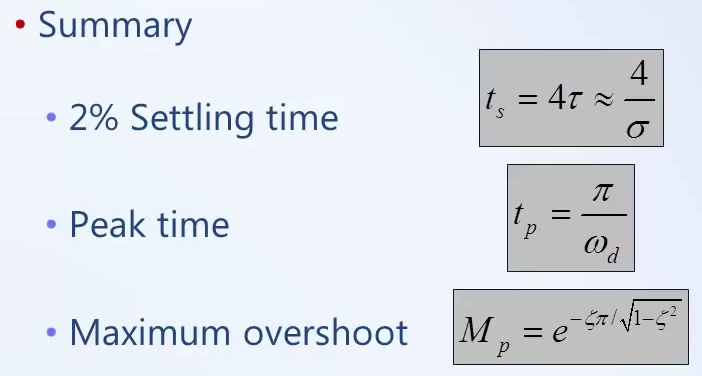
2%稳定时间
峰值时间
超调量
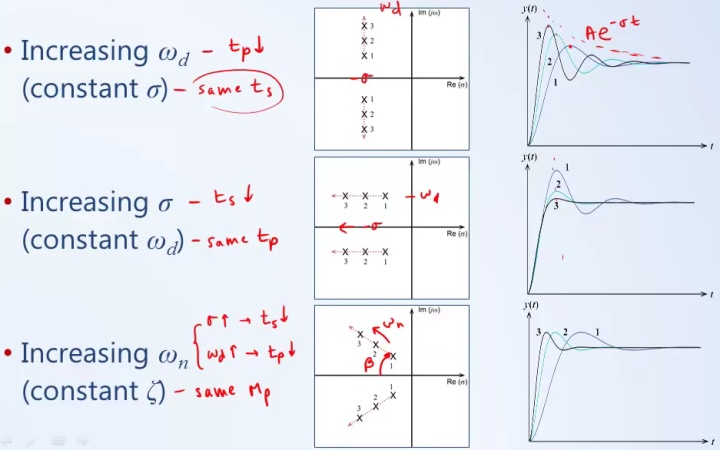
由此可见极点位置对于波形的影响,同样的,根据
编辑于 2019-03-12
最后
以上就是落后大雁最近收集整理的关于一阶系统单位阶跃响应的特点_控制理论学习笔记(4)——一阶系统和二阶系统...的全部内容,更多相关一阶系统单位阶跃响应内容请搜索靠谱客的其他文章。
本图文内容来源于网友提供,作为学习参考使用,或来自网络收集整理,版权属于原作者所有。








发表评论 取消回复