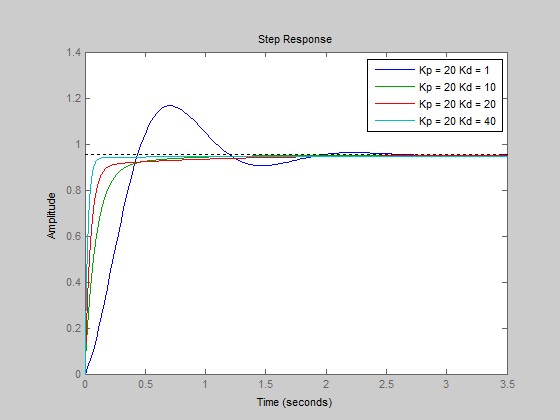
上图可以很容易观察得知,随着Kp与Kd比值的增大,曲线的过调现象越来越明显
换句话说,就是随着Kp与Kd比值的减小,很好的消除了过调现象,但是存在静差!
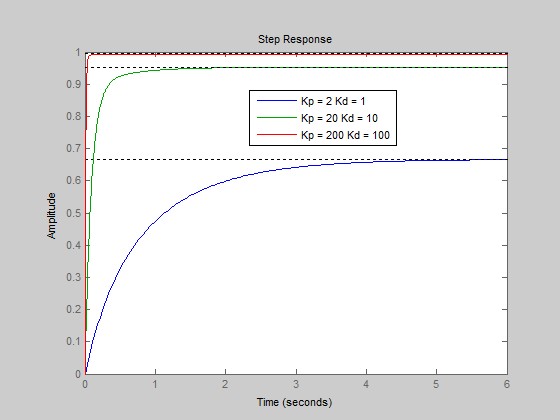
上图可以很好的说明,在Kp,Kd比例一定的时候,增大Kp(或者Kd)的值,将极大的缩短输出稳定时间
看看stephen怎么说
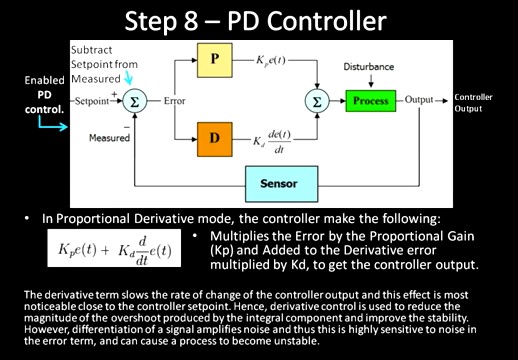
在比例微分模型中,控制器的效果是将误差与比例项系数相乘,并且,将结果与误差对时间的微分与微分项系数的乘积,相加。
微分项减慢了控制器的输出速率,并且,这种影响造成输出值最后稳定点很接近预设期望值。
因此,微分控制器被用来减少过分的由于积分控制器来带的过调问题,进而增加输出的稳定性。
然而,对信号的微分处理将放大噪声信号,因此微分对噪声有着高度的敏感性,可能导致进程的不稳定性
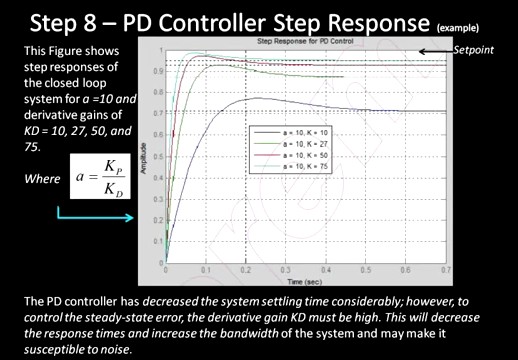
PD控制器减少了系统的达到稳定状态的时长,然而,为了消除静差,微分项系数Kd必须要很大,这势必将减少响应时间,增加带宽,易受到噪声的影响。
最后
以上就是稳重早晨最近收集整理的关于PD control model----PID controlor的全部内容,更多相关PD内容请搜索靠谱客的其他文章。
本图文内容来源于网友提供,作为学习参考使用,或来自网络收集整理,版权属于原作者所有。








发表评论 取消回复