在PD控制器里为了消除常值扰动带来的影响需要较大增益。但可以在保持增益不大的情况下增加积分项来获得0稳态误差。因此,让我们增加一个积分项

去到PD控制器里面。新的系统框图如下
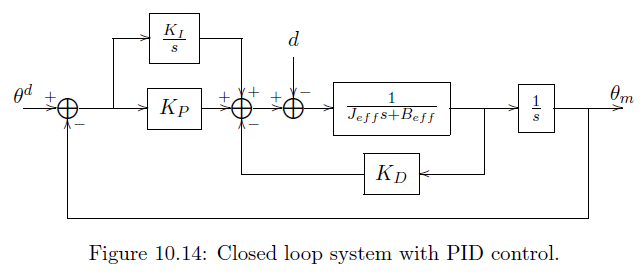
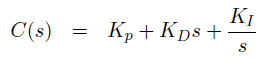
新的系统是Type 2型系统,该PID控制器能实现受阶跃扰动情况下对阶跃响应的稳态跟踪,当然前提是该闭环系统稳定。PID控制器控制结构为
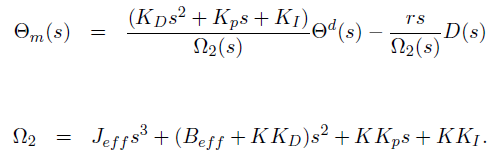
此时该闭环系统为三阶系统
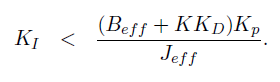
对该多项式使用Routh-Hurwitz判据,发现只要增益为正那么该系统就稳定,另外
10.3.4 Saturation
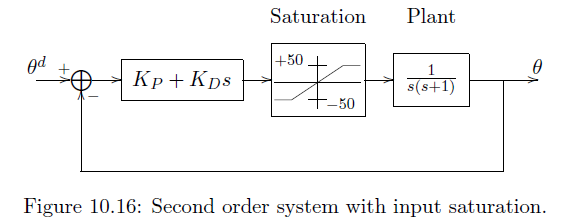
理论上来说,只要PID或者PD控制器的增益足够大,受定值扰动情况下我们可以获得任意快的响应速度以及任意小的稳态误差。但实际情况下系统总是有个最快响应极限,这主要有两个原因,第一个原因是饱和度,这是指电机的最大输出扭矩是有限的;第二个原因是电机轴的柔性。
例10.3 一个考虑了电机的饱和度的框图如下所示
至于关节柔性因素,如果用kr代表关节处的有效刚性,那么关节的共振频率为
一般工程上会限制ω不超过ωr的一半以避免激发关节的共振。我们会在10.5节详细讨论
这些例子都充分展示了在一些额外因素的影响下PID控制器的不足之处,这些额外因素指的是例如输入饱和度、扰动以及未建模的动力学结构。
最后
以上就是清秀柜子最近收集整理的关于《机器人动力学与控制》第十章——独立关节控制 10.3.3 PID 控制器 10.3.4 饱和度的全部内容,更多相关《机器人动力学与控制》第十章——独立关节控制内容请搜索靠谱客的其他文章。
本图文内容来源于网友提供,作为学习参考使用,或来自网络收集整理,版权属于原作者所有。








发表评论 取消回复