1.比例-微分(PD)控制
(1) 将比例(P)控制改为比例-微分(PD)控制:不改变常值稳态误差,只改善系统动态性能。特点是:自然频率
w
n
w_n
wn不变,阻尼比增大,因为它们与K有关,所以适当选择开环增益K和微分时间常数
T
d
T_d
Td,即可达到目的。比例-微分(PD)控制,相当于给系统增加了一个闭环零点-z=
−
1
/
T
d
-1/T_d
−1/Td。
(2)简要归纳比例-微分(PD)控制对系统性能的影响:
a.增大系统阻尼,使阶跃响应的超调量下降,调节时间缩短,且常值稳态误差和自然频率不变。
b.采用微分控制后,允许选用较大的开环增益K,在保证一定的动态性能条件下,减小稳态误差。
2.MATLAB验证分析
在输入R(s)作用下,闭环传递函数为
K
+
11
S
S
2
+
12
S
+
K
frac{K+11S}{S^2+12S+K}
S2+12S+KK+11S
在扰动N(s)作用下,闭环传递函数为
−
1
S
2
+
12
S
+
K
frac{-1}{S^2+12S+K}
S2+12S+K−1
由特征方程结合劳斯判据可知当K大于0时,系统即稳定。但还需要考虑扰动的影响以及动态性能。为了满足要求,需要选择合适的K,这里取K=100和20。
>> K=[100 20];
for i=1:1:2
sys=tf([11 K(i)],[1 12 K(i)]); %建模,R(s)作用下
sysn=tf([-1],[1 12 K(i)]) ;%建模,N(s)作用下
figure(i);t=0:0.002:3;
step(sys,t);hold on;
step(sysn,t);grid
end
结果如下:
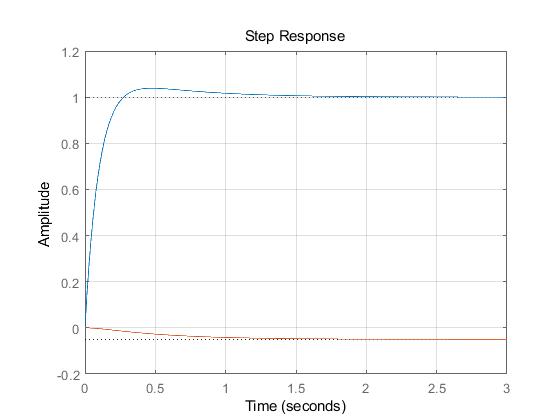
(1)蓝色实线为K=20,输入信号作用下的响应;橙色虚线为K=20,扰动信号作用下的响应
 (2)蓝色实线为K=100,输入信号作用下的响应;橙色虚线为K=100,扰动信号作用下的响应
(2)蓝色实线为K=100,输入信号作用下的响应;橙色虚线为K=100,扰动信号作用下的响应
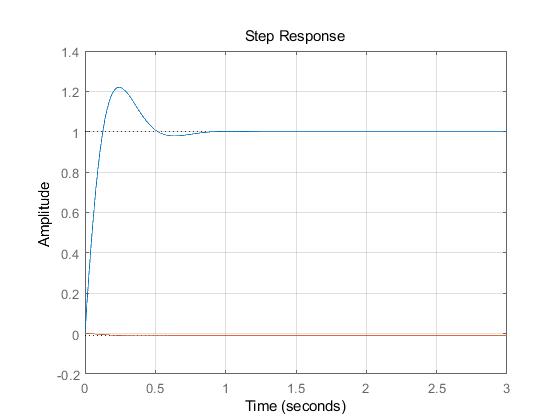 该控制系统在两种增益情况下的单位阶跃响应性能如表3-6所示。
该控制系统在两种增益情况下的单位阶跃响应性能如表3-6所示。
| 增益K | 超调量 | 调节时间 | 输入下的稳态误差 | 扰动下的稳态误差 |
|---|---|---|---|---|
| 100 | 22% | 0.666s | 0 | -0.01 |
| 20 | 3.86% | 0.913s | 0 | -0.05 |
因此,应取K=20。
最后
以上就是尊敬月饼最近收集整理的关于自动控制原理(2)——系统时域设计的全部内容,更多相关自动控制原理(2)——系统时域设计内容请搜索靠谱客的其他文章。








发表评论 取消回复