目录
????1 概述
????2 运行结果
????3 参考文献
????????4 Matlab代码
????1 概述
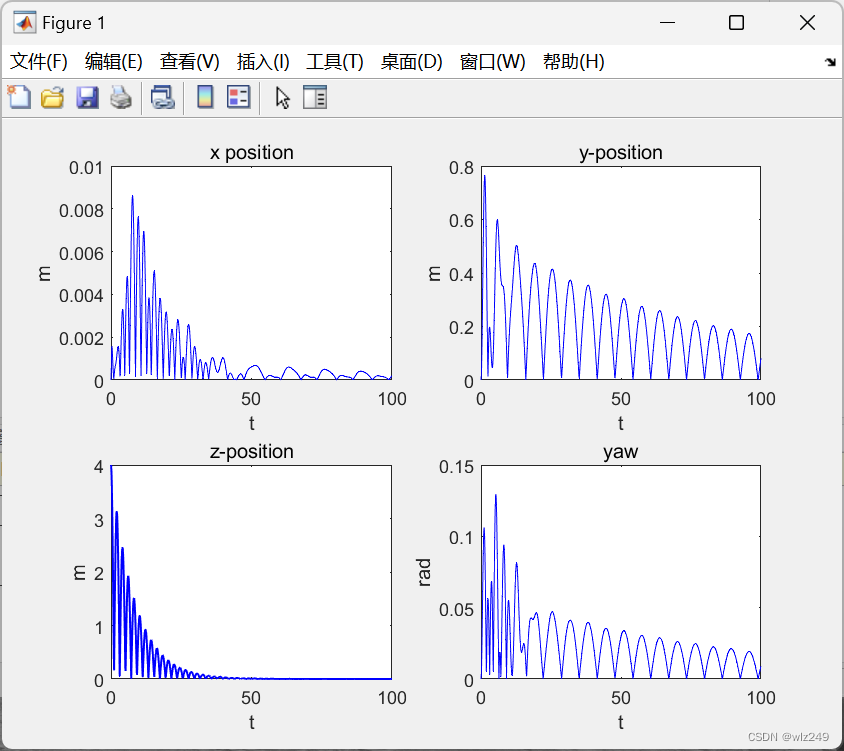
当机器人手指与障碍物接触时,呈现出2阶机械阻抗特性。在阻抗控制算法中,不需直接计算加速度,从而避免了因大加速度误差给控制带来的不利因素。结合期望轨迹和实际位置及速度,产生一个参考轨迹,手指跟踪此参考轨迹即可自动获得期望阻抗特性.。
????2 运行结果
????3 参考文献
[1]董晓星,李戈,刘刚峰,赵杰.冗余空间机械臂的运动学和笛卡尔阻抗控制方法[J].中国机械工程,2014,25(01):36-41.
????????4 Matlab代码
主函数部分代码:
clear all; close all; clc;
xinit = [0;0;0;0;0;0;0;pi/2;0;0;0;0;0;0;0;0];
% tspan = linspace(t1,t2,n);
tspan = 0:.1:100;
% options = odeset('RelTol',1e-5,'Stats','on','OutputFcn',@odeplot);
[t,xt] = ode45('Dyn1',tspan,xinit);
% x_des = [0 0 2 0 0 0 0 0]';
x_telta1 = abs(xt(:,1));
x_telta2 = abs(xt(:,2));
[a,b] = size(xt);
x_telta3 = abs(4*ones(1,b)-xt(:,3));
% plot(t,x_telta1,t,x_telta2,t,x_telta3)
subplot(2,2,1)
plot(t,abs(xt(:,1)),'b');
xlabel('t');
ylabel('m');
title('x position')
subplot(2,2,2)
plot(t,abs(xt(:,2)),'b');
xlabel('t');
ylabel('m');
title('y-position')
subplot(2,2,3)
p = plot(t,x_telta3,'b');
p(1).LineWidth = 1;
xlabel('t');
ylabel('m');
title('z-position');
subplot(2,2,4)
plot(t,abs(xt(:,4)),'b');
xlabel('t');
ylabel('rad');
title('yaw');
最后
以上就是隐形棉花糖最近收集整理的关于机器人手臂四旋翼的笛卡尔阻抗控制(Matlab代码实现)的全部内容,更多相关机器人手臂四旋翼内容请搜索靠谱客的其他文章。








发表评论 取消回复