之前写过一篇阻抗控制的文章,【机器人基础】机器人阻抗控制概念写的比较浅也不是很专业,最近上了桂凯博士的动力学课程之后有了更深入的认识,认真整理总结了一下,这次详细地分析一下阻抗/导纳控制。
1、柔顺控制
柔顺控制概念对于理解阻抗/导纳控制非常重要,所以单独做一节来讨论。首先大家要明确一点,位置控制是有局限性的,在位置精度需求很高且环境刚度很大的情况下会出问题,为什么呢?因为位置一旦有偏差,环境的刚度很大,再加上机器人本身极大的刚度,硬碰硬,两者之间会产生很大的力,这不论对机器人还是环境都会带来很大的损伤。邵总写过机器人开门的文章,可以去看看,会有帮助的。阻抗控制的实现方法应该是多种多样的,请能否概述一下大概有几种方法
柔顺控制光看名字就能想象出来了,机械臂正在移动,如果突然来了一个外力,机器人将顺着这个外力运动,外力撤销之后,再回复到之前的状态。就像一个人突然被推了一下,人会产生一个惯性运动,这叫做柔顺。
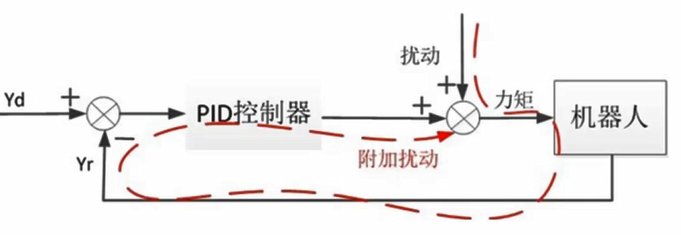
再往细点讲,为什么位置控制它不柔顺呢?看下面这张带干扰的位置控制框图,PID控制器的一个功能是消除扰动,外力加上来想要改变机器人原本运动的位置,可PID控制器获得反馈信号之后,输出的效果是让抵消外力的干扰,这两者之间是一个对抗的关系,这就不柔顺了!,在其他很多控制问题中是应该要尽可能快速消除扰动信号的, 但如果机器人的任务中需要做到柔顺,这不是一个好的结果。
2、阻抗/导纳控制的设计目的
阻抗/导纳控制在有些论文里面会混作一谈,都称为阻抗控制,因为阻抗控制和导纳控制有相同的地方,环境接触力(或者说外力)和位置偏差之间满足公式(2)的关系,这个公式反映了阻抗控制器(这里暂时把阻抗/导纳都称为阻抗控制器)的阻抗特性。控制器就是要根据1)对象模型和2)阻抗特性来设计,这也是阻抗/导纳控制设计的根本目的(设计控制器/控制率)。
M
d
,
D
d
,
K
d
M_d,D_d,K_d
Md,Dd,Kd代表期望阻抗参数,分别是惯性特性、阻尼特性和刚度特性,通过调节这三个参数,从而改变阻抗的效果,或者可以理解成改变机器人末端的柔顺度。
M
d
e
¨
+
D
d
e
˙
+
K
d
e
=
F
e
x
t
(
2
)
begin{aligned} M_d ddot e+D_d dot e+K_de=F_{ext} (2) end{aligned}
Mde¨+Dde˙+Kde=Fext(2)
e
=
x
−
x
0
begin{aligned} e = x-x_0 end{aligned}
e=x−x0
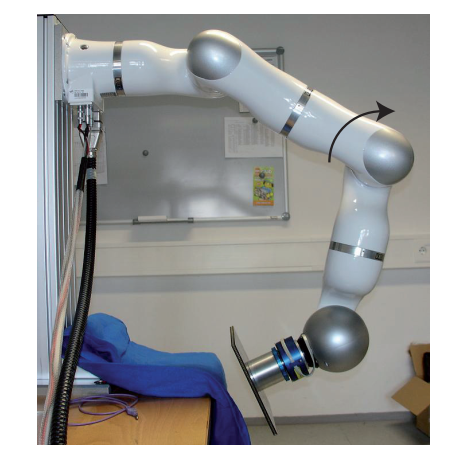
举一个具体的案例,让下图的机器人去按压海绵,如果设置海绵表面的位置为
x
0
x_0
x0,当机械臂挤压海绵的时候,产生了接触力
F
e
x
t
F_{ext}
Fext。如果我拉着机械臂往下摁,接触力会变大, 对于导纳控制的策略而言,误差
e
e
e会变大,期望的位置也会随之变大,位置控制环里面有了新的控制目标。
阻抗/导纳控制的核心思想可以用公式(2)来表达,外力和位置偏差是一个动态的关系,以此来达到柔顺的目的。
下面以一个实际的案例来分析,考虑一个单自由度系统,它的动力学模型可以表示为:
m
x
¨
=
F
+
F
e
x
t
(
1
)
begin{aligned} m ddot x=F+F_{ext}(1) end{aligned}
mx¨=F+Fext(1)
F F F代表控制器计算出来的输出力, F e x t F_{ext} Fext是外力或者说是机器人与环境之间的接触力(external force)。先记一下,后面的仿真要拿这个系统来分析。
3、阻抗控制
为了使得位置偏差和外力之间呈柔顺的关系,结合公式(1)和公式(2),计算出阻抗控制率:
F
=
(
m
M
d
−
1
)
F
e
x
t
+
m
x
¨
0
−
m
M
d
(
D
d
e
˙
+
K
d
e
)
(
3
)
begin{aligned} F=(frac{m}{M_d}-1)F_{ext}+mddot x_0-frac{m}{M_d}(D_ddot e+K_de) (3) end{aligned}
F=(Mdm−1)Fext+mx¨0−Mdm(Dde˙+Kde)(3)
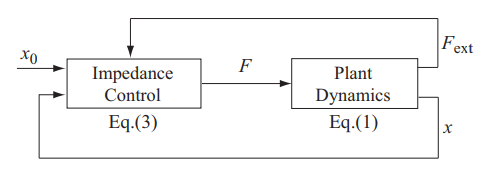
阻抗控制根据期望位置 x 0 x_0 x0,实际位置x和外力 F e x t F_{ext} Fext算出输出力F,输出力F作用在对象模型上,可以看到阻抗控制的内部回路是一个力环,而接下来看到的导纳控制它的内部回路是一个位置环。
导纳控制
导纳控制的位置控制器用一个PD控制器来实现
F
=
k
p
(
x
d
−
x
)
−
k
d
x
˙
(
4
)
begin{aligned} F=k_p(x_d-x)-k_ddot x (4) end{aligned}
F=kp(xd−x)−kdx˙(4)
结合公式(4)和公式(1),结合公式(2)和公式(4)并将
x
x
x替换成
x
d
x_d
xd(假设位置控制内环实现无静差控制,那么
x
=
x
d
x=x_d
x=xd),得到完整的动力学公式。
m
x
¨
+
k
d
x
˙
+
k
p
(
x
−
x
d
)
=
F
e
x
t
(
5
)
begin{aligned} mddot x+k_ddot x+k_p(x-x_d)=F_{ext}(5) end{aligned}
mx¨+kdx˙+kp(x−xd)=Fext(5)
M d ( x ¨ d − x ¨ 0 ) + D d ( x ˙ d − x ˙ 0 ) + K d ( x d − x 0 ) = F e x t ( 6 ) begin{aligned} M_d(ddot x_d-ddot x_0)+D_d(dot x_d-dot x_0)+K_d(x_d-x_0)=F_{ext}(6) end{aligned} Md(x¨d−x¨0)+Dd(x˙d−x˙0)+Kd(xd−x0)=Fext(6)
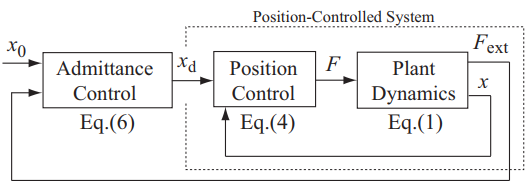
从导纳控制框图可以看到导纳控制的期望位置不是固定的,而是根据公式(6)计算得到的。
程序仿真
以导纳控制为例,尝试在matlab里面实现,假设
x
0
x_0
x0为阶跃响应,其他相关参数如下:
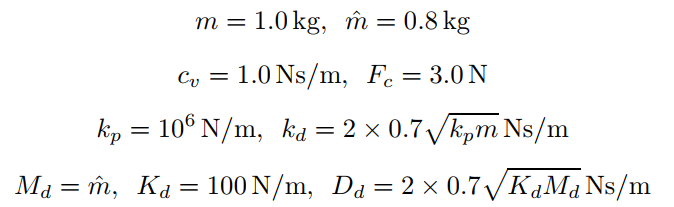
考虑到模型的不确定性,阻抗特性中的
M
d
M_d
Md使用
m
^
hat m
m^代替而不直接使用
m
m
m。另外考虑到动力学模型中摩擦力的影响,增加了两个参数
C
v
C_v
Cv(粘性摩擦力系数)和
F
c
F_c
Fc(库伦摩擦力系数),摩擦力模型为:
F
f
=
−
s
i
g
n
(
x
˙
)
(
c
v
∣
x
˙
∣
+
F
c
)
F_f = -sign(dot x)(c_v left| dot x right| +F_c)
Ff=−sign(x˙)(cv∣x˙∣+Fc)
设外力
F
e
x
t
=
−
k
e
(
x
−
x
0
)
F_{ext}=-k_e(x-x_0)
Fext=−ke(x−x0),取
k
e
=
3000
k_e=3000
ke=3000代表环境对象的刚度,此时模型的动力学方程为:
m
x
¨
=
F
+
F
e
x
t
+
F
f
mddot x=F+F_{ext}+F_f
mx¨=F+Fext+Ff。
simulink框架如下:
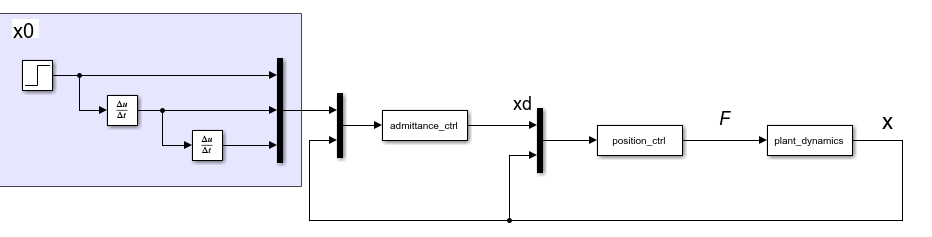
导纳控制器Admittance_ctrl的sfunction如下(只展示mdlDerivatives中的内容)
mhat = 0.8; % 单位:kg
% 环境刚度
ke = 300; % 单位:N/m
% 阻抗参数
Md = mhat; % 单位:kg
Kd = 100; % 单位:N/m
Dd = 2*0.7*sqrt(Kd*Md); % 单位:N*s/m
% 设定值
X0 = u(1); dX0 = u(2); ddX0 = u(3);
X = u(4);
% 外力
Fext = -ke*(X-X0);
% Xd微分方程
Xd = x(1);
dXd = x(2);
ddXd = 1/Md*(Fext - Kd*(Xd-X0) - Dd*(dXd-dX0)) + ddX0;
sys(1) = dXd;
sys(2) = ddXd;位置控制器Position_ctrl的sfunction如下(只展示mdlOutputs中的内容)
%PD控制系数
kp = 1e3; % 单位:N/m
kd = 2*0.7*sqrt(kp*m); % 单位:N*s/m
Xd = u(1);
X = u(3); dX = u(4);
% 输出力
F = kp*(Xd-X) - kd*dX;
sys = F;模型Plant的sfunction如下(只展示mdlOutputs中的内容)
% 质量
m = 1.0; % 单位:kg
% 弹簧刚度
ke = 300; % 单位:N/m
% 粘性系数和库仑摩擦系数(coefficients of viscous and Coulomb friction)
cv = 1.0; % 单位:N*s/m
Fc = 3.0; % 单位:N
X0 = 1;
F = u;
% 外力
Fext = -ke*(x(1)-X0);
% 摩擦力
Ff = -sign(x(2))*(cv*abs(x(2))+Fc);
% 系统动力学,考虑了外力和摩擦力,和工业机器人动力学模型逻辑一致
S = (F + Fext + Ff)/m;
sys(1) = x(2);
sys(2) = S(1);
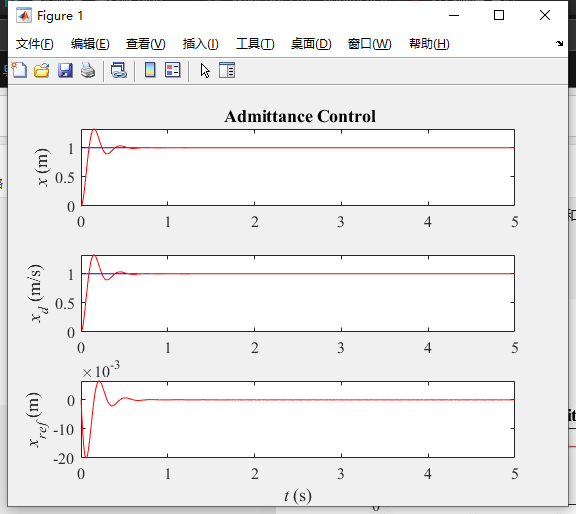
仿真结果展示如下:
参考文献
Unified Impedance and Admittance Control
论文百度云链接
链接:https://pan.baidu.com/s/1HBJtXriKg3BbQJulXhtz5w
提取码:yoh2
最后
以上就是无聊毛巾最近收集整理的关于【机器人基础】阻抗/导纳控制深度解析的全部内容,更多相关【机器人基础】阻抗/导纳控制深度解析内容请搜索靠谱客的其他文章。








发表评论 取消回复