整体代码+word 下载链接:https://download.csdn.net/download/yjw0911/84546994
添加链接描述
目标:
伪惯性矩阵:
惯性矩阵:2阶
哥氏力和向心力矢量:1阶
重力矢量:0阶
1、拉格朗日法的数学基础
定义拉格朗日函数 L 为系统总动能 EK和总势能 EP之差即:
总动能 EK和总势能 EP坐标系的选择可以任意。由拉格朗日法所采用的方程的一般表达式为:
.
式中:
Fi为作用在第 i 个关节处的广义力;
qi为表示动能或者势能的广义坐标;
n为连杆数目。
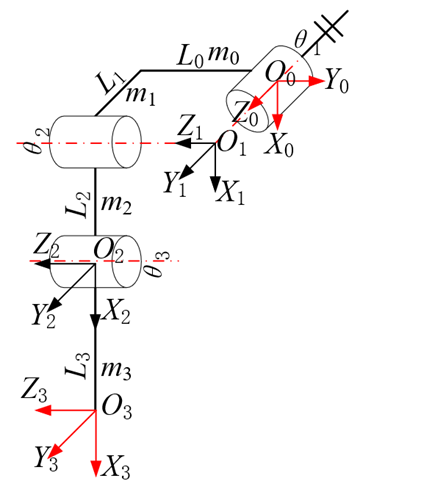
机械手臂一般的动力学方程,其推导步骤有四步:
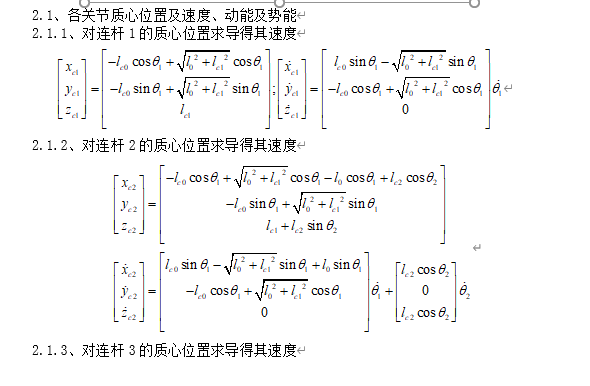
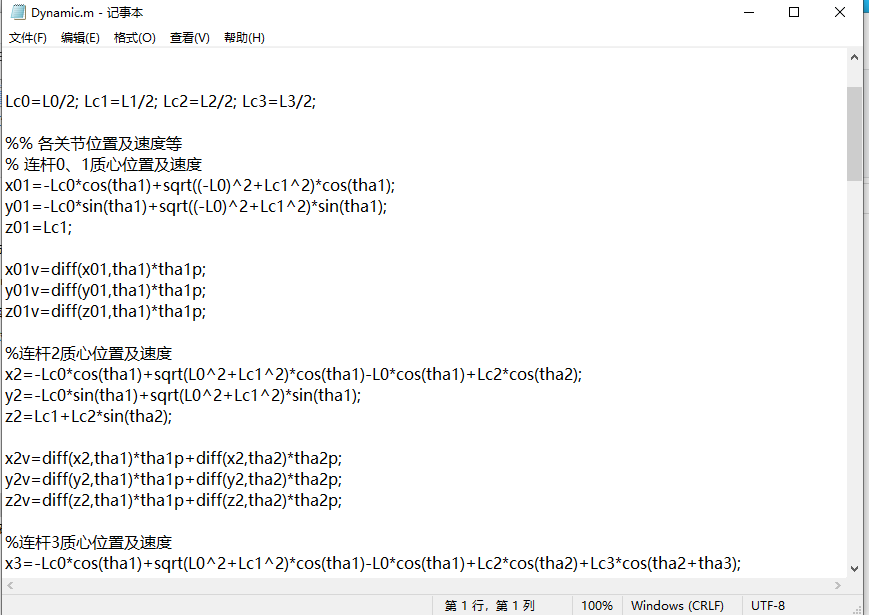
(1)计算各个连杆上任意一点的速度;
(2)计算每个连杆的动能以及机械手臂的总动能;
(3)计算每个连杆的势能以及机械手臂的总势能;
(4)建立拉格朗日函数,对其求导,得出动力学方程。
等
代码
咨询链接:matlab正逆运动学分析与轨迹规划
最后
以上就是内向御姐最近收集整理的关于三自由度机器人动力学(三个转动自由度+word报告+matlab代码)的全部内容,更多相关三自由度机器人动力学(三个转动自由度+word报告+matlab代码)内容请搜索靠谱客的其他文章。
本图文内容来源于网友提供,作为学习参考使用,或来自网络收集整理,版权属于原作者所有。








发表评论 取消回复