描述
阻抗控制
阻抗控制(eImpedance Controling),线路板中的导体中会有各种信号的传递,为提高其传输速率而必须提高其频率,线路本身若因蚀刻,叠层厚度,导线宽度等不同因素,将会造成阻抗值得变化,使其信号失真。故在高速线路板上的导体,其阻抗值应控制在某一范围之内,称为“阻抗控制”。
PCB 迹线的阻抗将由其感应和电容性电感、电阻和电导系数确定。影响PCB走线的阻抗的因素主要有: 铜线的宽度、铜线的厚度、介质的介电常数、介质的厚度、焊盘的厚度、地线的路径、走线周边的走线等。PCB 阻抗的范围是 25 至120 欧姆。
在实际情况下,PCB 传输线路通常由一个导线迹线、一个或多个参考层和绝缘材质组成。迹线和板层构成了控制阻抗。PCB 将常常采用多层结构,并且控制阻抗也可以采用各种方式来构建。但是,无论使用什么方式,阻抗值都将由其物理结构和绝缘材料的电子特性决定:
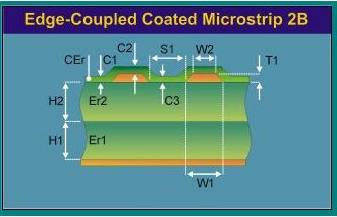
信号迹线的宽度和厚度 迹线两侧的内核或预填材质的高度 迹线和板层的配置 内核和预填材质的绝缘常数
PCB传输线主要有两种形式:微带线(Microstrip)与带状线(Stripline)。
阻抗控制的特点
在实现力控制时,阻抗控制、力/位置混合控制、显式力控方法,各有其独特的特点。力/位置控制方法是基于将末端执行器的坐标空间按其是否被环境约束而分为位置子空间和力子空间,力/位置控制方法通过控制末端执行器在位置子空间的位置和在力子空间的力来实现顺应控制,这种方法的优点是可以直接控制末端执行器和环境间的相互作用力,这在有些场合是很重要的。其缺点是需要很多任务规划以及需要在力控和位置控制之间切换。
而阻抗控制是靠调节末端执行器的位置和接触力之间的动态关系来实现顺应控制的。这种方法为避碰、有约束和无约束运动提供了一种统一的方法。其优点是需要很少离线任务规划,对扰动和不确定性有很好的鲁棒性。能实现系统由无约束到有约束运动的稳定转换。因此阻抗控制被认为更适合完成装配工作。其缺点是在实际中难于准确得到末端执行器的参考轨迹和环境的位置、刚度。从而既无法准确实现位置控制又无法准确实现力控制。近年来提出了基于阻抗控制的力跟踪算法,文献[2]通过调节参考轨迹Xr给出了存在环境不确定性时的力跟踪阻抗控制算法。
阻抗控制与显式力控的相比,证明了在刚性环境,二阶阻抗控制和有前馈的比例显式力控的等价性。说明阻抗控制是较显式力控更一般的方法,阻抗控制的主要特性是使机器人与环境的交互不受接触的物体影响,而力控却易受接触物体的影响。
阻抗控制的实现方法
在阻抗控制的早期,使用了固定增益的PD控制,这种方法实现简单,但在机器人位形、速度变化时无法保持理想阻抗。经过学者们的努力,发展了多种阻抗控制方法,总的看来有两类实现阻抗控制的方法,一类是基于动力学模型的阻抗控制方法,另一类是基于位置的阻抗控制方法。
基于动力学模型的阻抗控制方法
基于动力学模型的控制方法是应用最为广泛的方法。这种方法检测位置和接触力,使用机器人动力学模型作为前馈输入,所以这种控制策略依赖于动力学模型的精确性。同基于位置的阻抗控制方法相比,这种方法能提供为减小接触力所需的较小的理想的阻尼和刚度。基于位置的阻抗控制方法通常所能提供只能是大的理想的阻尼和刚度,这不利于减小机器人和约束之间的接触力。
在基于动力学模型的控制方法中,首先提出基于动力学模型的控制方法,该方法在用计算力矩法实现理想阻抗时,需要知道机器人动力学模型。后来的学者进一步发展了基于动力学模型的控制方法,利用适当选取的状态反馈和前馈来实现鲁棒阻抗控制,提出了基于精确机器人动力学模型的阻抗控制方法,其优点是不需检测力和避免了高增益。提出了把阻抗控制和力/位置混合控制器结合在一起混合阻抗控制器。引入目标阻抗参考轨迹,将自适应方法直接应用到阻抗控制方法,不要求精确的动力学模型,缺点是由于测量噪音的影响,由自适应方法难以得到足够精度的阻抗控制参数。使用鲁棒性控制来克服模型的不确定性,但需要大量的计算和很大的增益,这在实际中受到限制。
随着人工智能研究的发展,运用智能控制的研究成果,发展了多种控制策略来提高基于动力学模型的阻抗控制方法的控制性能,使基于动力学模型的控制器在存在动力学模型的不确定性时也能达到好的控制效果。
提出学习阻抗控制方法,给定目标阻抗,学习控制器能通过学习,使操作机能够随着操作的重复进行使闭环响应达到目标阻抗。其缺点是假定每次操作取同样的初始位置和速度,且假定无动力学波动和测量噪声。给出具有鲁棒性的学习阻抗控制方法,使阻抗误差在存在动力学波动和测量噪声初始位置误差的情况下收敛到趋于零的范围内。提出用神经网络来补偿机器人动力学和环境的不确定,通过训练使神经网络收敛从而实现阻抗控制函数。
基于位置的阻抗控制方法
基于位置的阻抗控制方法在实施时是通过跟踪理想阻抗模型的位置来实现的。这种方法要检测位置、速度和接触力,将检测到的接触力施加到理想阻抗模型,从而可以获得理想位置矢量,使用内部位置控制环来跟踪这个理想位置矢量。这种方法不依赖于动力学模型。由于位置控制器的大增益会带来关节的高刚度,这种方法的缺点是当机器人的实际位置和模型理想位置矢量不同时将带来大的阻抗误差,从而将这种方法限制在简单任务中。
为工业机器人设计了一个基于位置的阻抗控制来提高工业机器人的性能。使用了基于位置的阻抗控制来实现力跟踪。在内环使用位置反馈来提高鲁棒性,在外环使用位置反馈来跟踪理想阻抗来提高基于位置的阻抗控制器的性能。使用了模糊补偿器来产生位置补偿达到减小在力控方向的超调和抖动。
在阻抗控制的稳定性方面,中系统讨论了基本的基于动力学模型的阻抗控制方法和基于位置的阻抗控制方法的稳定性质,获得了阻抗控制的参数稳定性边界。
打开APP阅读更多精彩内容
点击阅读全文
最后
以上就是灵巧毛衣最近收集整理的关于阻抗控制代码linux,阻抗控制的特点及阻抗控制的实现方法的全部内容,更多相关阻抗控制代码linux,阻抗控制内容请搜索靠谱客的其他文章。








发表评论 取消回复