我是靠谱客的博主 风趣野狼,这篇文章主要介绍二、Crazepony1无人机源码分析-(5)50Hz循环1.程序源码2.整体流程图3.遥控器数据处理4.飞行模式切换5.自动着陆6.高度融合7.高度悬停7.角度环控制8.串口数据上传,现在分享给大家,希望可以做个参考。
二、Crazepony1无人机源码分析-(5)50Hz循环
- 1.程序源码
- 2.整体流程图
- 3.遥控器数据处理
- 4.飞行模式切换
- 5.自动着陆
- 6.高度融合
- 7.高度悬停
- 7.角度环控制
- 8.串口数据上传
1.程序源码
//50Hz Loop
if(loop50HzFlag) //20ms
{
loop50HzFlag=0;
realExecPrd[3]=micros()-startTime[3];
startTime[3]=micros();
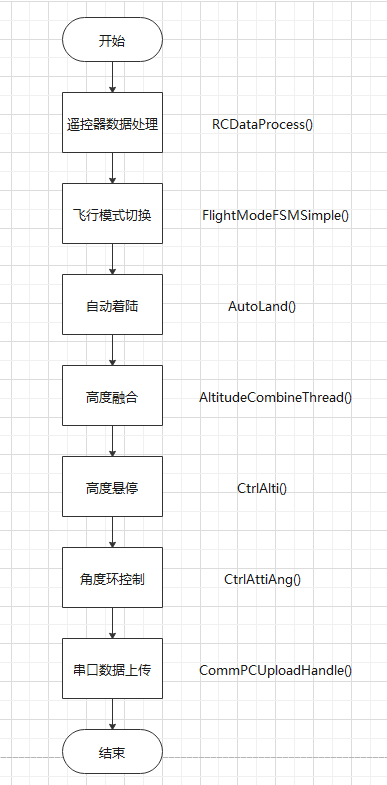
RCDataProcess();//对遥控接受的数据处理:限幅值,添加死区,转化为物理量,处理armState状态
FlightModeFSMSimple();//飞行模式切换
if(altCtrlMode==LANDING)
{
AutoLand(); //自动着陆
}
AltitudeCombineThread();//高度融合
CtrlAlti();//高度悬停
CtrlAttiAng();//角度环控制
//PC Monitor
//#ifndef UART_DEBUG
if(btSrc!=SRC_APP) {
CommPCUploadHandle(); //串口数据上传
}
//#endif
execTime[3]=micros()-startTime[3];
}
2.整体流程图
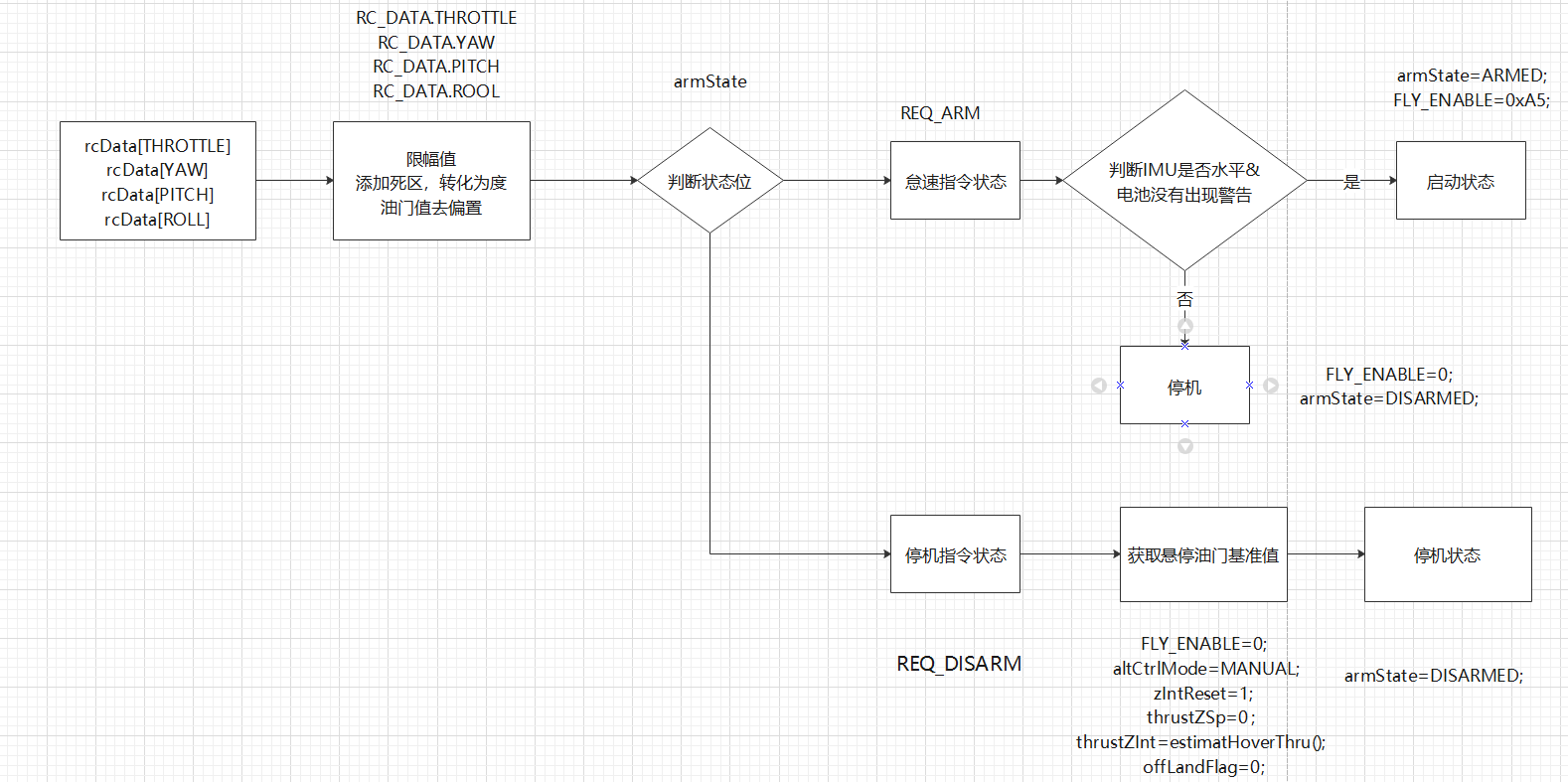
3.遥控器数据处理
4.飞行模式切换
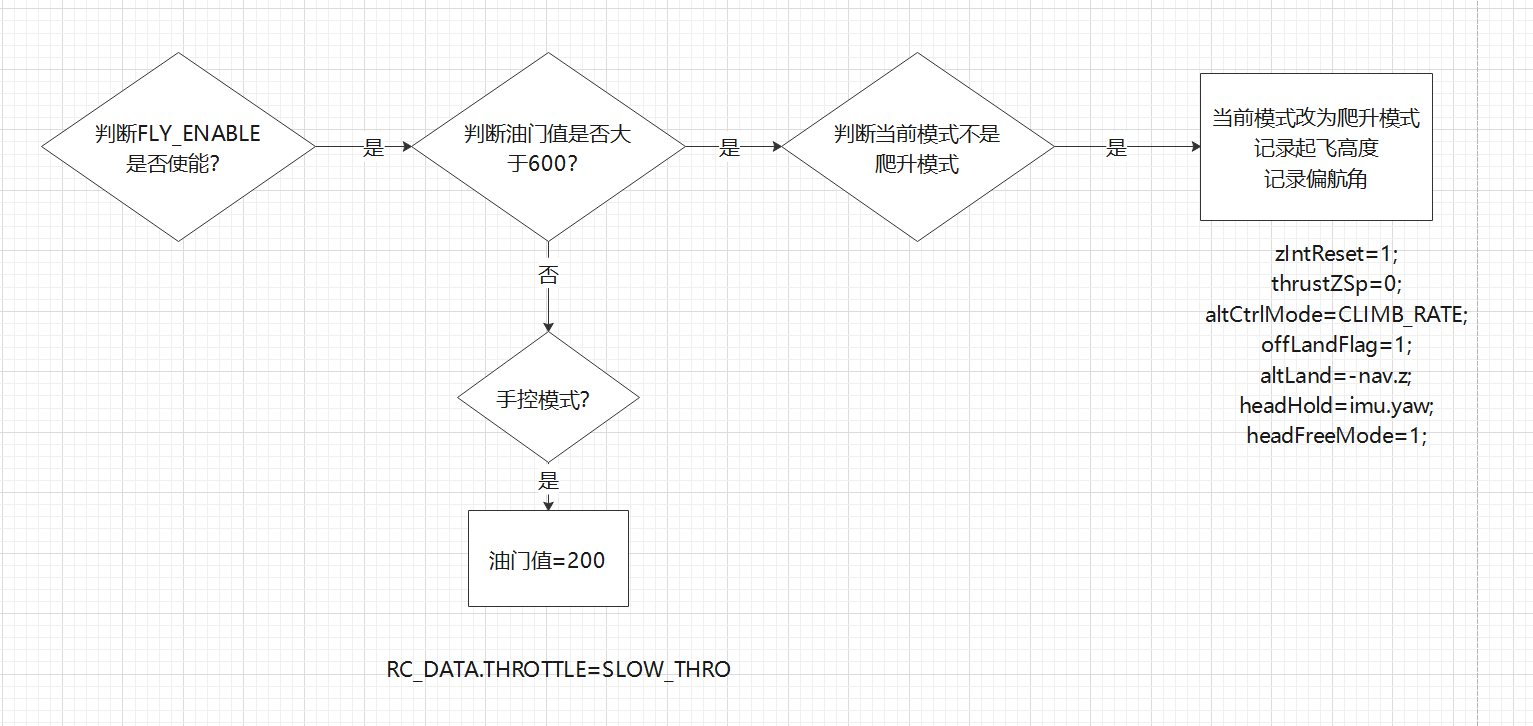
进入怠速模式时,油门值为200,无人机在原地以较低转速运行,当控制遥控器将油门值设为600以上,无人机进入爬升模式(CLIMB_RATE),油门输入值来源于高度悬停函数的输出,无人机逐渐起飞;(见 二、Crazepony1无人机源码分析-(3)100Hz循环 - 5.角速度环与电机输出值的分配)
5.自动着陆
使能自动着陆后,无人机以LAND_SPEED速度下降4S后,停机;
注:CtrlAlti函数中有对高度速度进行设置。
6.高度融合
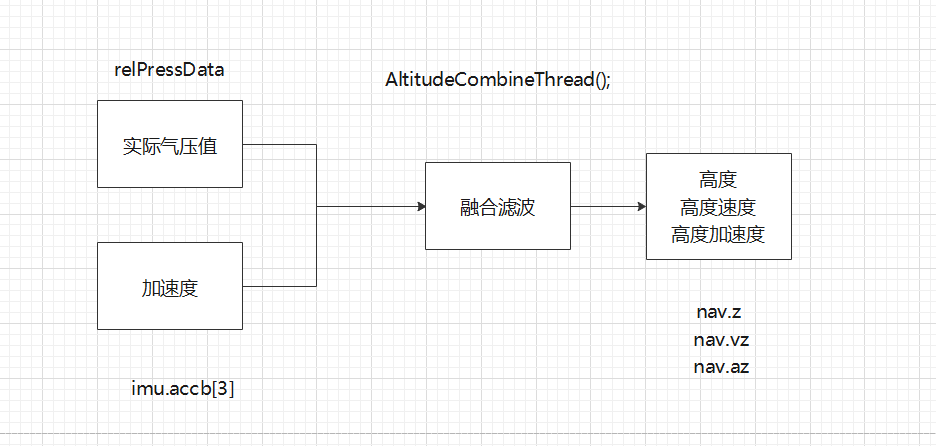
通过气压值与加速度融合后,得到高度的数据,具体算法还不是很明白。
7.高度悬停
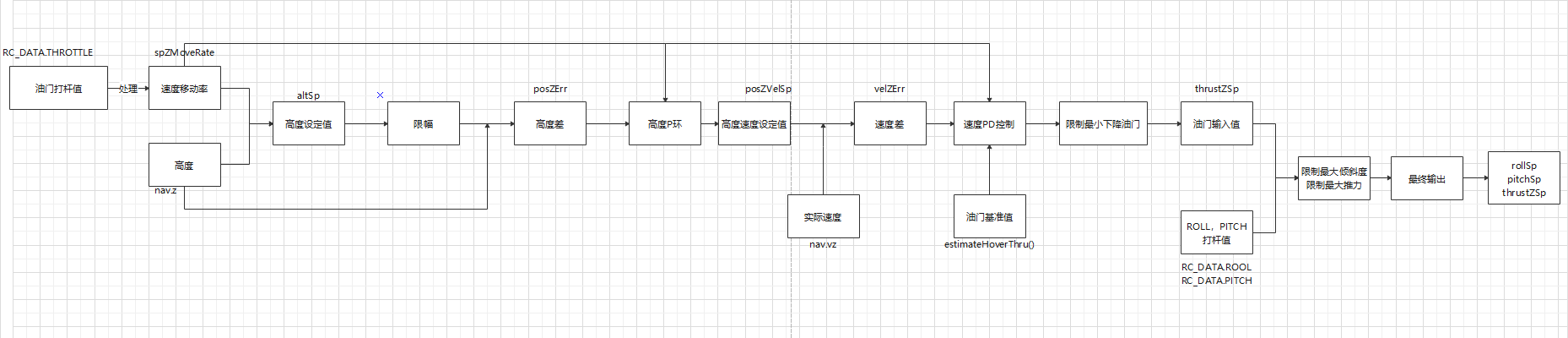
thrustZSp:油门输入值,在CtrlMotor()函数中用到;
rollSp,pitchSp:打杆值的处理,作为角度环的输入;
7.角度环控制
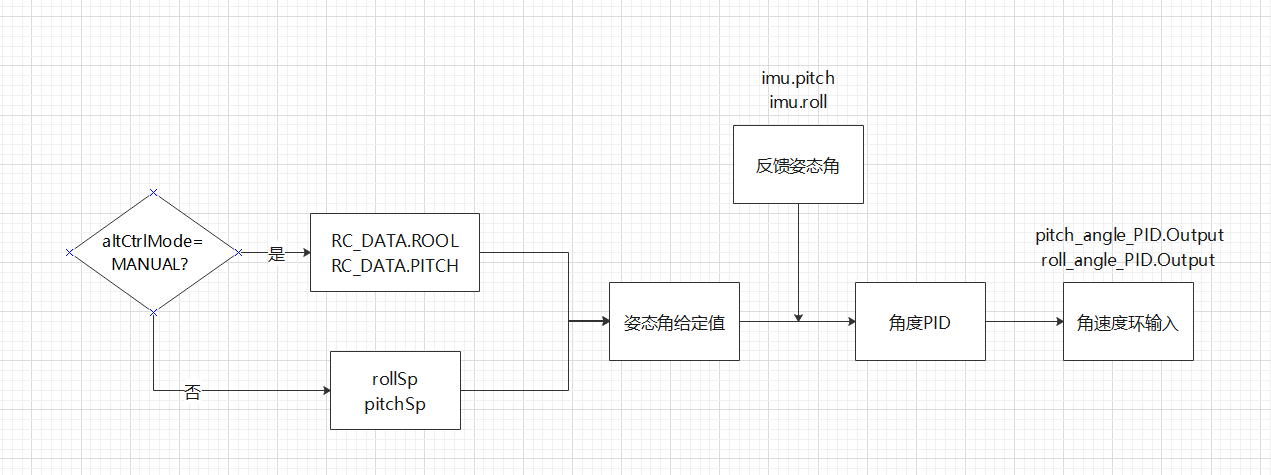
imu.pitch,imu.roll:通过软件姿态解算(IMUSO3Thread函数)算出来的姿态角;
8.串口数据上传
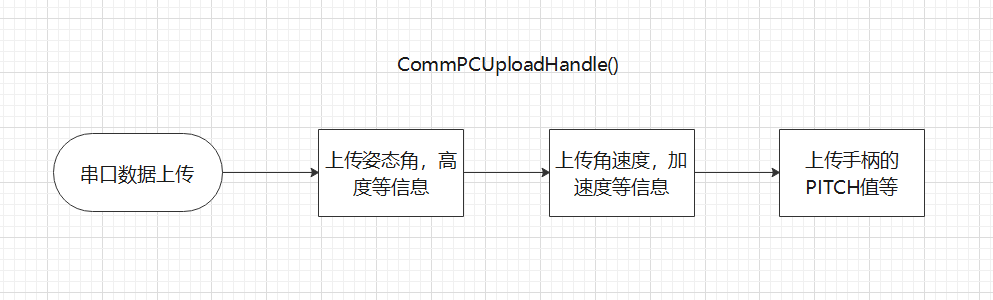
配合Crazepony提供的上位机,通过USB线与无人机连接,将无人机的信息上传到电脑中,进行实时监控;
可惜需要数据线连接,我想通过蓝牙与上位机进行连接,这样在 飞机飞行的过程中,也能够实时监控数据,但咨询了一下Crazepony的技术支持,了解到电脑连不上无人机的蓝牙。
最后
以上就是风趣野狼最近收集整理的关于二、Crazepony1无人机源码分析-(5)50Hz循环1.程序源码2.整体流程图3.遥控器数据处理4.飞行模式切换5.自动着陆6.高度融合7.高度悬停7.角度环控制8.串口数据上传的全部内容,更多相关二、Crazepony1无人机源码分析-(5)50Hz循环1内容请搜索靠谱客的其他文章。
本图文内容来源于网友提供,作为学习参考使用,或来自网络收集整理,版权属于原作者所有。








发表评论 取消回复