这方面正点原子的无人机就做得不错,大的无人机没试几次就摔得不像样又得花大量时间去买元器件和组装,麻烦,耗时。
小型无人机就能够很方便地多次实验,不怕它炸机。调试什么的也方便一些。
自己也能研究得透彻一些,从硬件到软件,不想大型无人机 ,光飞控比如Pixhawk源码你就折腾不完。
先把一个小型无人机得硬件到软件研究透彻先。并且能自己做一个出来。
是的,这方面我觉得正点原子做得挺好的,先研究正点原子的源码,要简单清晰很多,匿名,无名虽然已经相比pixhawk要简单很多但还是不够。
真的去把一个无人机从软件到硬件都自己真正啃烂,这种感觉很棒。真正每一行代码,每一个元器件,这样你再去自己设计飞控也会好些。
而且像pxihawk可能不方便自己的二次开发。比如弄个自主循迹的无人机什么的。这个想法错了,实际真正做SLAM研究还是用Pixhawk吧,还是应该稳定一些。只是单纯从学习的角度,小型无人机好些,从应用的角度,还是那种大的集成的飞控效果好些应该。
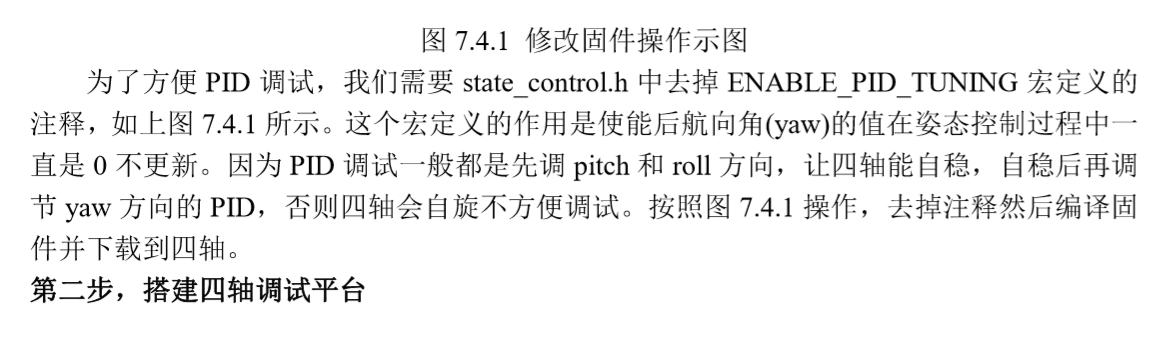
正点原子的开发指南也有教我们怎么调,我感觉还是正点原子想得周到,让我们能够用一根绳子就可以自己调参数了,着可能也是小型无人机得好处,大型无人机还得买调试架,所以还是小型无人机适合学习。

最后
以上就是纯情月光最近收集整理的关于还是先折腾小型无人机好些,耐摔,也能够自己比较方便地调参。的全部内容,更多相关还是先折腾小型无人机好些内容请搜索靠谱客的其他文章。
本图文内容来源于网友提供,作为学习参考使用,或来自网络收集整理,版权属于原作者所有。








发表评论 取消回复