这两天大学同学看我折腾四轴,正巧他最近的课题也是无人机,就问我点问题
碰巧说说我的个人理解
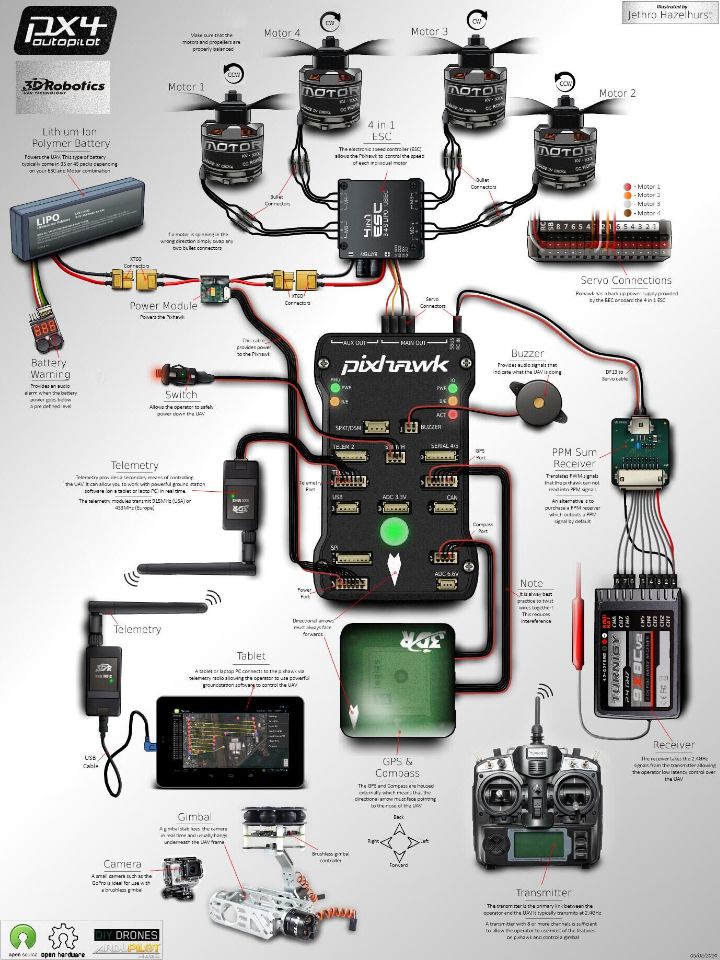
这个是pixhawk官方的各模块连接图,基本功能全都有的一个完整版
同学问我了解的时候,这个图发过去,他是这样的
这样的
那好吧,我们从头讲起,开头的那个图中的器件一个一个是怎么来的
从小我们就接触过四驱车,装着糖球的小电风扇,这些东西里面都装着电机,而且大多是130的有刷电机,如果我们随便选个电机先,想装个飞机,那么先不需要飞控,飞控是啥?没听过啊?
四旋翼 四旋翼 它有四个旋翼,也就有四个电机
所以,首先,需要四个电机吧

OK,电机有了
这玩意在天上飞,总不能扯跟线吧,得无线的吧
OK,整个无线的遥控器

遥控器发射信号,飞机上得装接收的吧

来吧,那把接收到的信号发给电机,不就可以控制它转了嘛,OK 完活了,欢迎大家投币、点赞、收…………
额,这不是玩具嘛,不行不行,太简单了
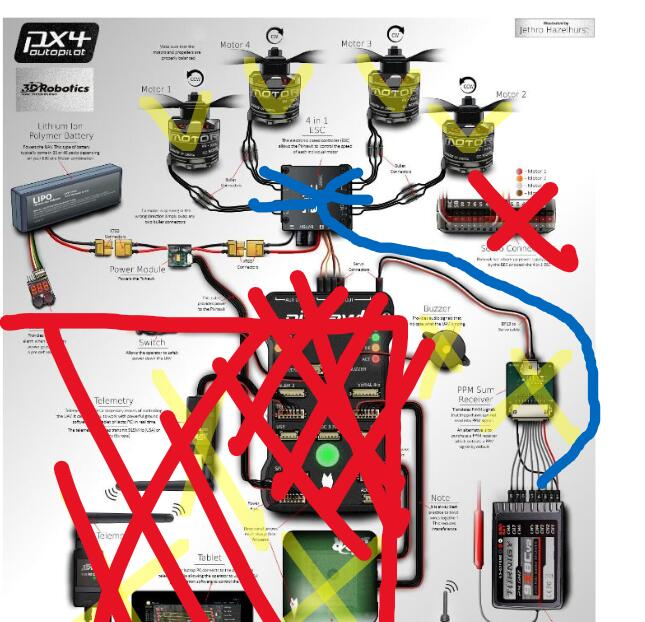
遥控器发射信号,接收机接收信号
通过蓝色线连过去给电机
理论上不就完了吗
通过遥控器控制四个电机不同转速
就控制飞机俯仰滚转偏航了
对吧
那么,第一个问题来了
这玩意想要飞的又高又远还稳
就得要求电机转速足够高
转的越快越稳嗷
所以得提升相同供电电压下,电机的转速
那每分钟几百转的有刷电机不够我们用
就要考虑无刷电机了
这样才可以达到更高的转速
OK,那无刷电机,大多都是至少三相的

看图
所以这玩意有三根线
三根线?懵了呀
平时我们不就两根嘛,一个VCC 一个GND,三根线就不能用我们平时两根这种了
就需要多一个控制电机的调速器
电子调速器,简称电调
这样的话,
这句话就变成了:
遥控器发射信号,接收机接收信号,通过线连过去给电调,电调控制电机怎么转
电机也从小时候四驱车上的有刷电机变成了牛逼的无刷电机了
性能++
但是呢
不是所有电机的性能都是完全一致的
也不是所有环境都是一点风没有的
就是没有,电机一转,也有杂风
这就导致,飞机不能完美的按照你的心意,直接垂直起飞, 稳稳地停在空中
所以就需要有个电脑帮你调,别累着自己,宝
这不飞控就来了
嗯呐
陀螺仪检测XYZ轴偏移
然后发给飞控,通过EKF处理
PID控制
返回控制量,发给电调
调整各个电机转速
达到调整整个飞机的姿态
稳稳地,老哥
基本上也就实现了开头那张图的所有核心器件的来源
其他功能,比如跑opencv人脸识别, 都是在额外的机载电脑上跑的,树莓派啊啥的
最后
以上就是冷酷铃铛最近收集整理的关于无人机系统的个人理解的全部内容,更多相关无人机系统内容请搜索靠谱客的其他文章。








发表评论 取消回复