一、APM类分析
老规矩,先上类图。
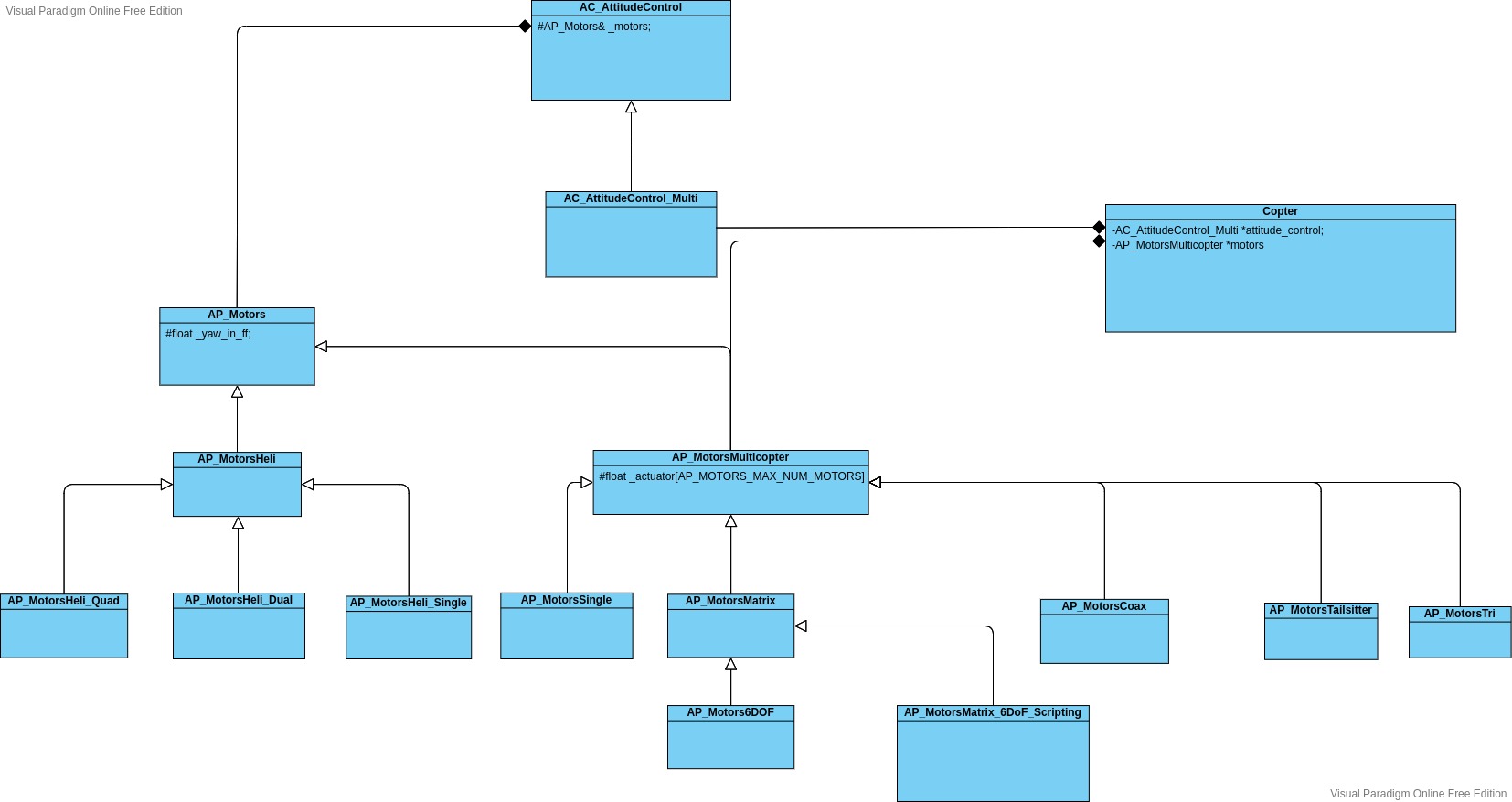
(1)
如图(1)所示,AP_Motors是大部分电机类的父类,是AC_AttitudeControl姿态控制类的保护型成员类。其中AP_MotorsMulticopter类声明为copter的私有成员类,在copter::allocate_motors()函数中根据具体机型实例化为对应的子类。
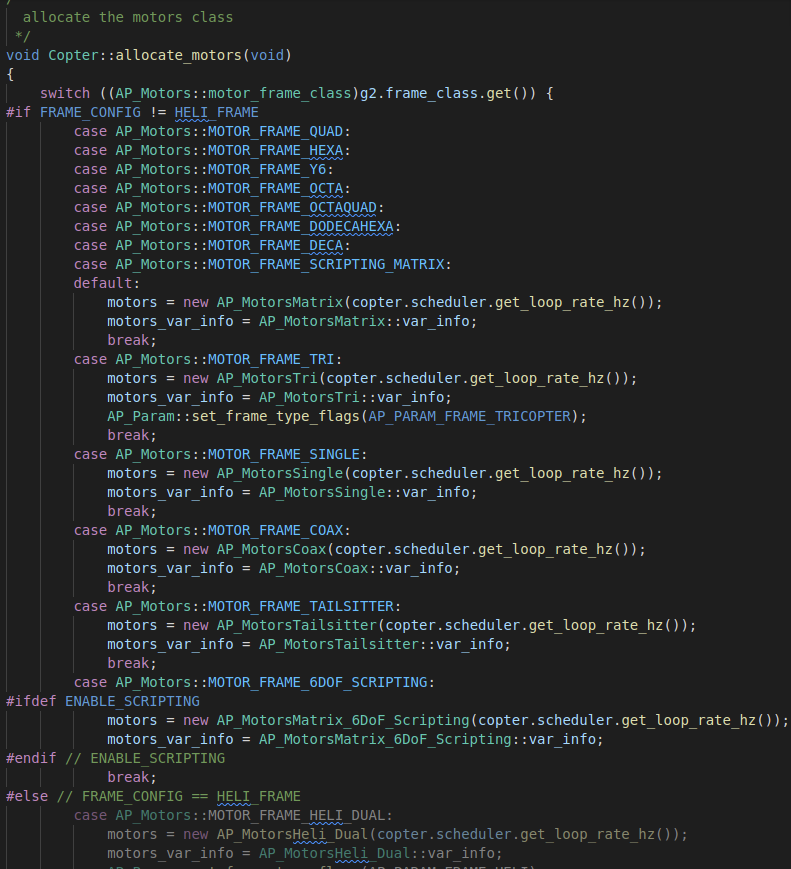
(2)
如图(2)所示,switch语句从ROM中读取飞行器类型的参数,根据机架类型new对应motor实例。
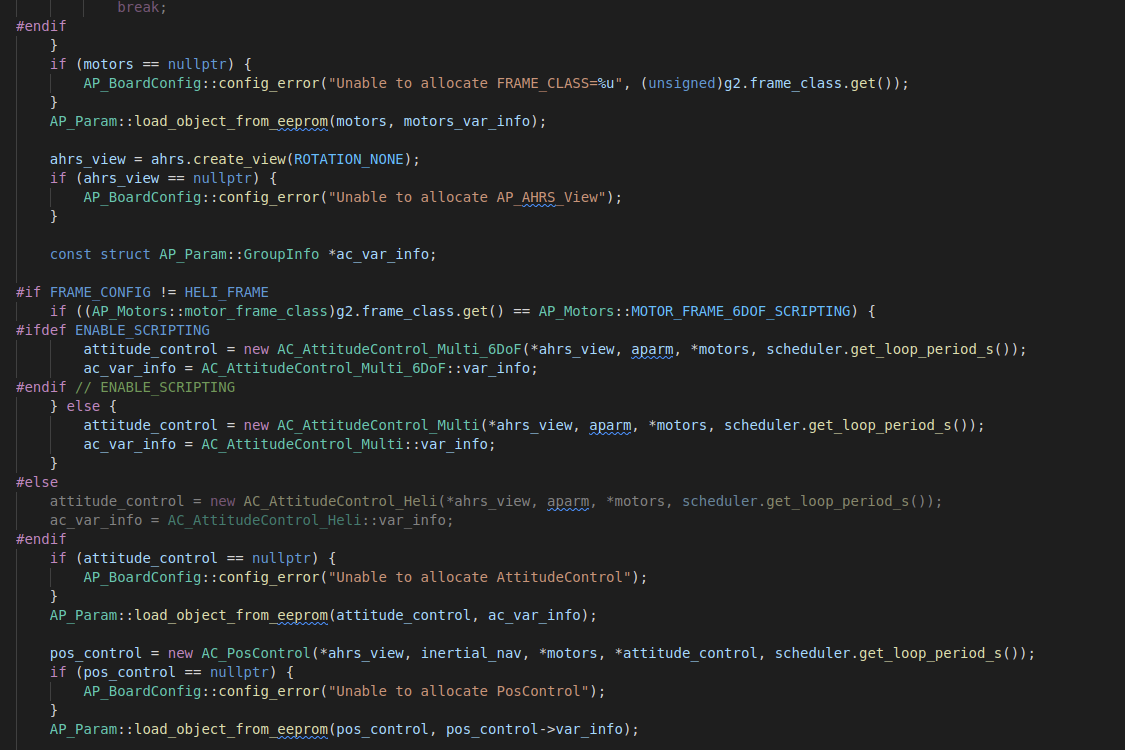
(3)
这里有个关键知识点,由于AP_Motors是AC_AttitudeControl类的引用成员类,因此在实例化AC_AttitudeControl类的时候必须先初始化AP_Motors类。再看源码,源码将上一步实例化的电机类的地址传输到AC_AttitudeControl类的构造函数中。因此,AC_AttitudeControl类的引用成员类_motors实际上就为Copter类中的motors成员类。可以在attitude_control对象中的_motors成员类中修改Copter类中motors类的变量。
二、数据流图分析
老规矩,先上图。
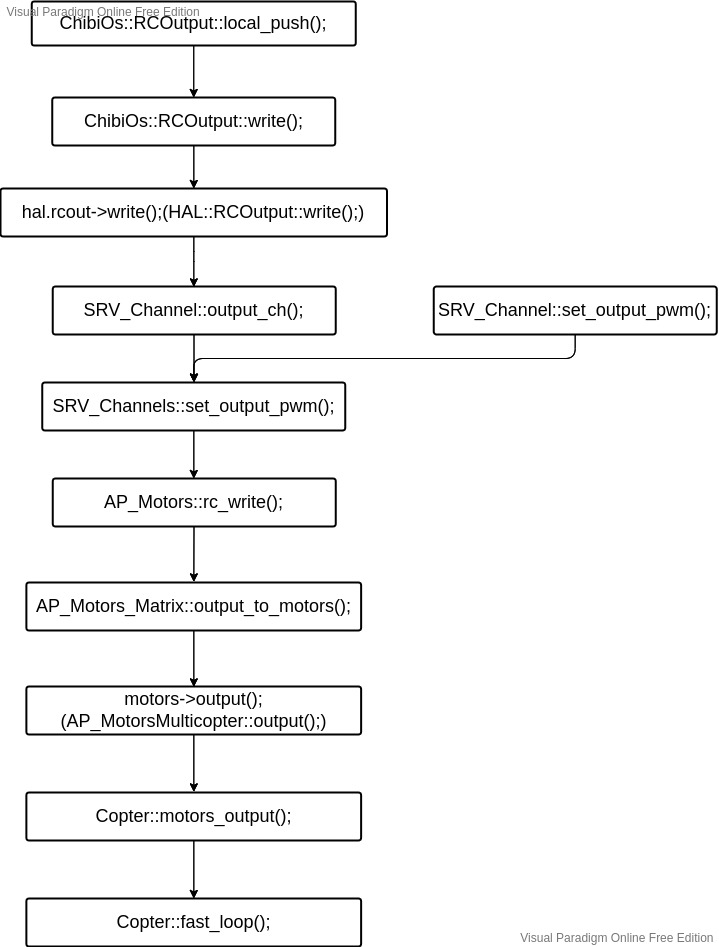
(4)
如图(4)所示,在Copter::fast_loop()方法中调用Copter::motors_output()方法,再一步一步调用到local_push()方法,实现电机输出。
最后
以上就是辛勤蜜蜂最近收集整理的关于APM中电机输出分析的全部内容,更多相关APM中电机输出分析内容请搜索靠谱客的其他文章。
本图文内容来源于网友提供,作为学习参考使用,或来自网络收集整理,版权属于原作者所有。








发表评论 取消回复