设天线根数
N
=
4
N=4
N=4,天线距离
D
=
λ
2
D=frac{lambda}{2}
D=2λ,所以归一化的天线距离
d
=
1
/
2
d=1/2
d=1/2。并且天线如下图方式摆放。

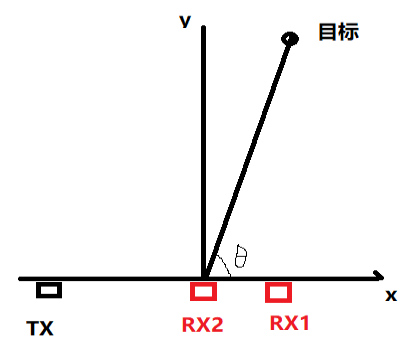
- 此时使用FFT方法求角度,精度和分辨率都不能令人满意。
- CAPON Beamforming方法的分辨率与精度都较FFT方法大大提高。Capon波束形成器(即最小方差无畸变响应波束形成器)使用部分自由度在期望的观测方向上形成一个波束,利用剩余的自由度在干扰方向上形成零陷。当有多个信号入射传感器阵列时,阵列输出功率将包括期望信号功率和干扰信号的功率。Capon最小方差法使干扰信号的输出功率最小,以抑制干扰信号,同时使增益在观测方向保持为常数 (通常设这个常数为1)。1
- CAPON Beamforming方法步骤如下:
3.1 先在速度与距离方向做FFT筛选出目标,目标在不同天线处的信号组成向量:
X = { x 1 , x 2 , x 3 , x 4 . . . x n } T ( n 表 示 不 同 天 线 ) X={ x_1,x_2,x_3,x_4...x_n}^T (n表示不同天线) X={x1,x2,x3,x4...xn}T(n表示不同天线)3.2 计算协方差矩阵
R = X × X H R=Xtimes X^H R=X×XH3.3 对于每个感兴趣的角度计算导向向量
α ( θ ) = { 1 , e i 2 π d c o s ( θ ) × 2 , e i 2 π d c o s ( θ ) × 3 , . . . , e i 2 π d c o s ( θ ) × ( N − 1 ) } T alpha(theta)={1,e^{i2pi dcos(theta)times2},e^{i2pi dcos(theta)times3},...,e^{i2pi dcos(theta)times (N-1)}}^T α(θ)={1,ei2πdcos(θ)×2,ei2πdcos(θ)×3,...,ei2πdcos(θ)×(N−1)}T3.4 该方向的到达功率如下:
P ( θ ) = 1 α ( θ ) H R − 1 α ( θ ) P(theta)=frac{1}{alpha(theta)^{H}R^{-1}alpha(theta)} P(θ)=α(θ)HR−1α(θ)1为了保证 R R R不是奇异矩阵,可以在对角线上加一个小值(对角线元素均值成一个小系数)
3.5对各个角度功率进行搜索寻找峰值,即可确定角度。 - FFT方法与CAPON Beamforming对比:
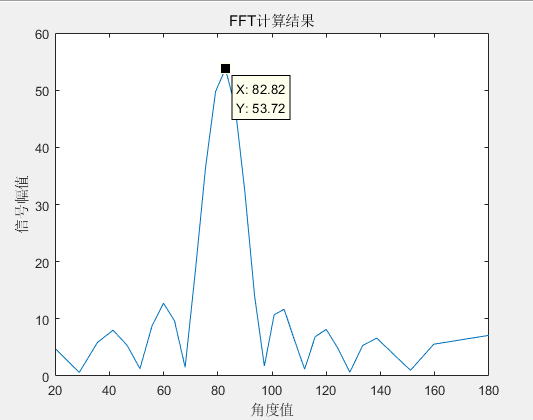
可见FFT结果为82.82度。
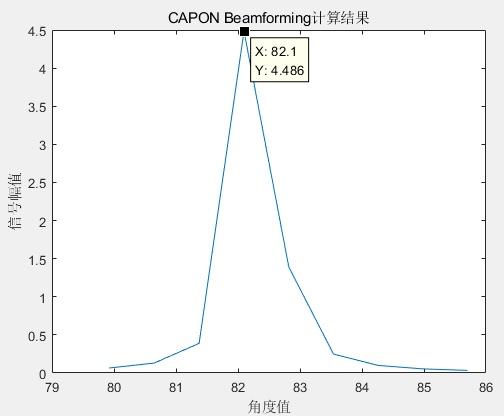
CAPON Beamforming计算结果为82.1度
仿真时的实际角度为82.1709度可见使用CAPONBeamforming可以提高精度。
鲁欣菂..智能天线的DOA估计算法的研究:哈尔滨工程大学硕士学位论文,2006年10月 ↩︎
最后
以上就是无情路人最近收集整理的关于77GHz毫米波雷达快速chirp信号技术(五):CAPON Beamforming的全部内容,更多相关77GHz毫米波雷达快速chirp信号技术(五):CAPON内容请搜索靠谱客的其他文章。








发表评论 取消回复