Beamforming algorithms - beamformers
最常见的波速形成算法:DAS(Delay and sum)
main idea:
The DAS beamformer applies a delay and an amplitude
weight to the output of each sensor, and then sums the resulting signals.
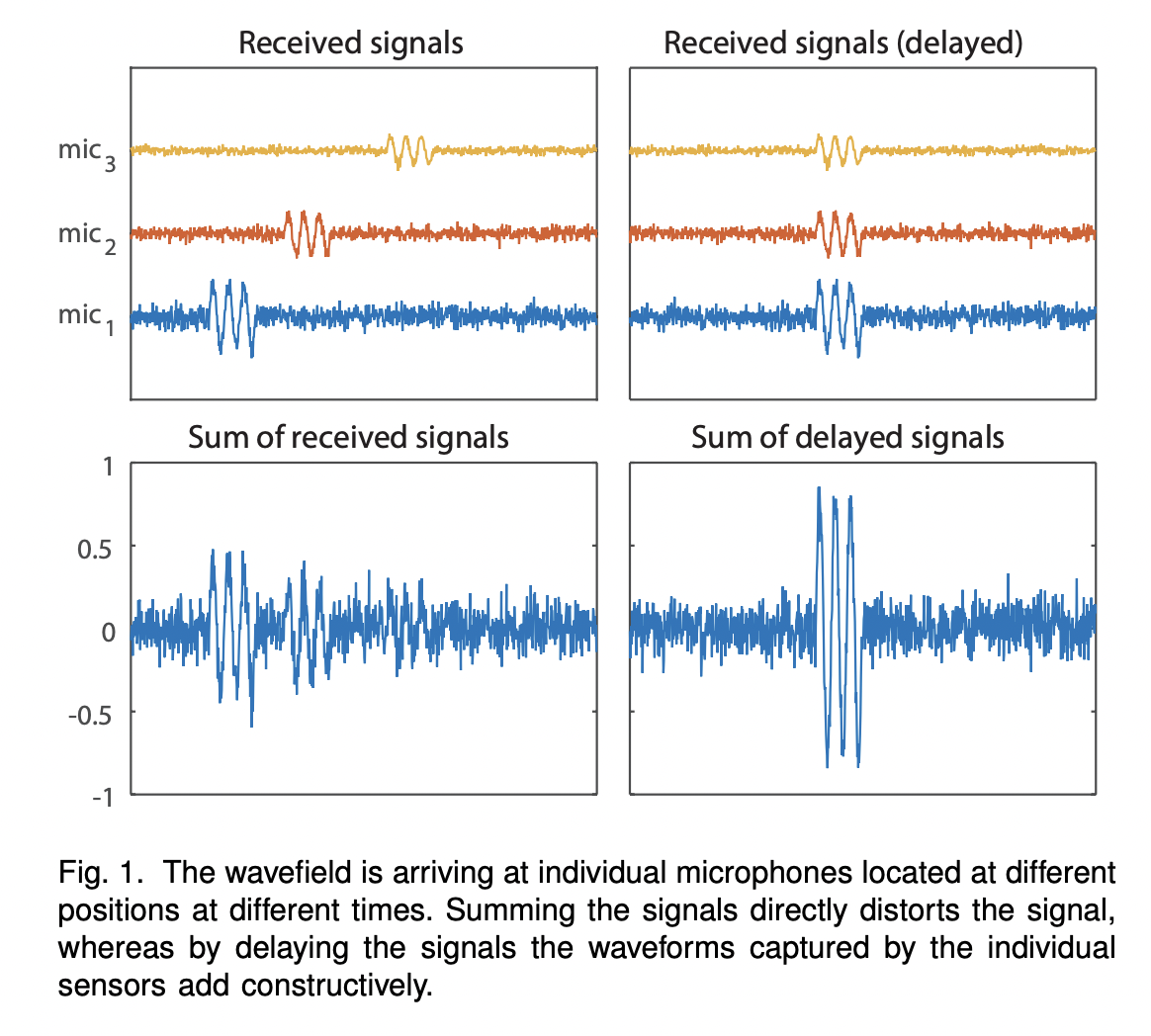
图1.波场在不同时间到达位于不同位置的单个麦克风。 对信号求和直接使信号失真,而通过延迟信号,各个传感器捕获的波形会建设性的相加。
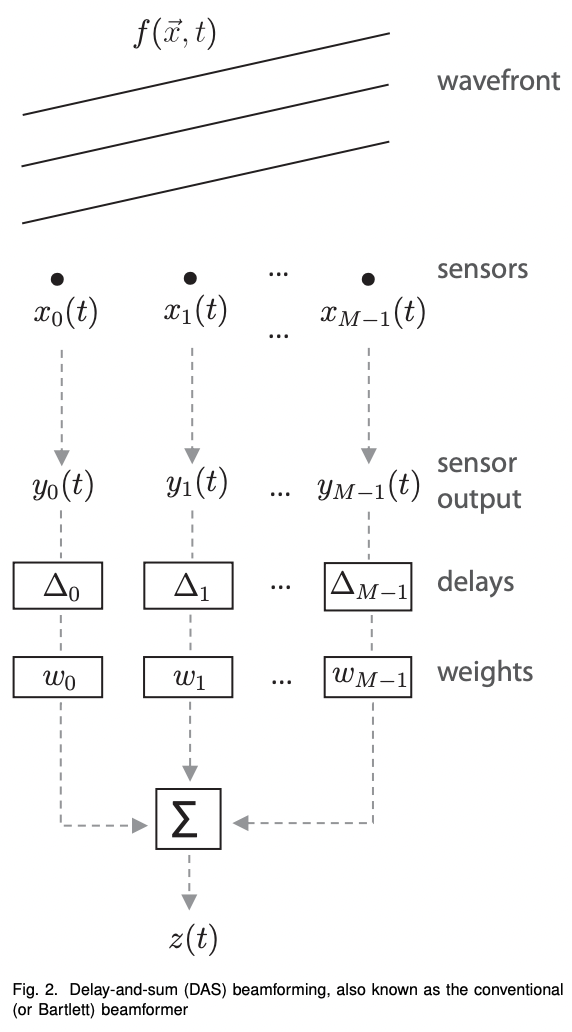
图2:DAS 原理图
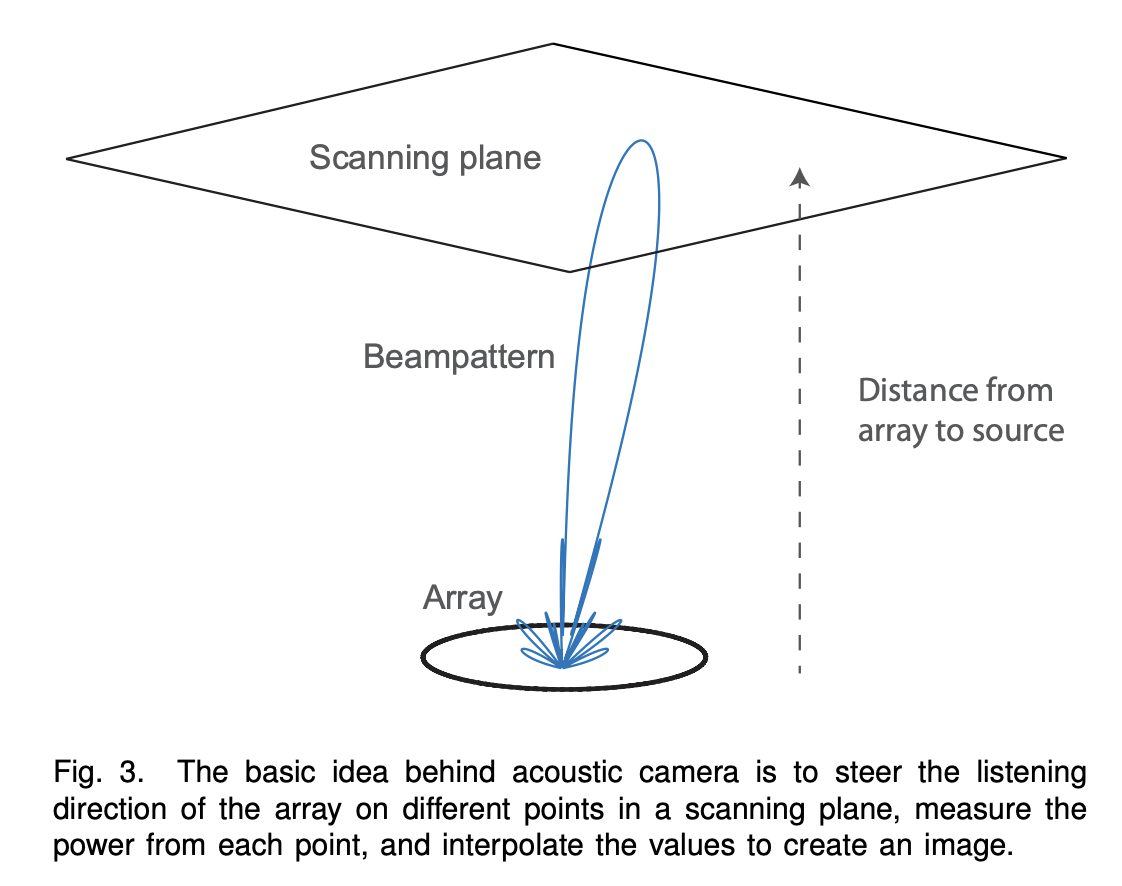
波束成形的基本思想是使用一组延迟将阵列引导至扫描平面中的不同方向或点。当转向方向与信号源重合时,将观察到最大输出power。通过对来自所有扫描点的测量输出功率进行插值,可以对空间power(扫描平面上的功率)进行着色并生成声像。
要点翻译:
选择延迟可以最大程度地提高阵列对来自特定方向的入射波的灵敏度。通过调整延迟,可以将阵列的观看方向转向光源,并且各个传感器捕获的波形会相长地相加。这意味着特定角度的信号会遭受相长干扰,而其他角度会遭受相长干扰。
图1.波场在不同时间到达位于不同位置的单个麦克风。对信号求和直接使信号失真,而通过延迟信号,各个传感器捕获的波形会相长地相加。
考虑一个由M个传感器组成的阵列,这些传感器位于空间〜xm = [xm,ym,zm]中的不同位置,该传感器测量波前f(〜x,t)。第m个传感器在空间上采样的波形为ym(t)= f(〜xm,t)。 DAS波束形成器包括对每个传感器的输出施加延迟∆m和振幅权重wm,然后将结果信号求和,如图2所示。
选择延迟可以最大程度地提高阵列对从特定方向传播的波的灵敏度。通过调整延迟,可以将阵列的观察方向转向光源,并且各个传感器捕获的波形会相长地相加。该操作有时称为堆叠。对阵列的不同传感器加权不同可以看作是各个传感器的增益因子,并且可以增强形状并降低监听光束的旁瓣电平。与自适应方法相反,DAS波束形成器的传感器权重是预先选择的,与接收波形无关。则DAS波束成形器在时域中的输出为
然后,波束成形的基本思想是使用一组延迟将阵列引导至扫描平面中的不同方向或点。当转向方向与信号源重合时,将观察到最大输出功率。通过对来自所有扫描点的测量输出功率进行插值,可以对空间功率(扫描平面上的功率)进行着色并生成声像。
现在,我们要描述使用DAS波束形成器时从任意入射角对单个频率波的阵列灵敏度。也就是说,我们要在扫描所有入射角而不是仅扫描平面中的点时表征阵列本身。首先考虑单个传感器的输入为
最后
以上就是勤劳小伙最近收集整理的关于2021-03-03-Beamforming algorithms - beamformers的全部内容,更多相关2021-03-03-Beamforming内容请搜索靠谱客的其他文章。








发表评论 取消回复