最近从 phased.TimeDelayBeamformer 扒了它的代码,简单改造作为最基本的麦克风阵列算法学习
refer to https://www.mathworks.com/help/phased/ref/phased.timedelaybeamformer-system-object.html
一、延时累加和beamformer
可以说是最基本的麦克风阵列算法,
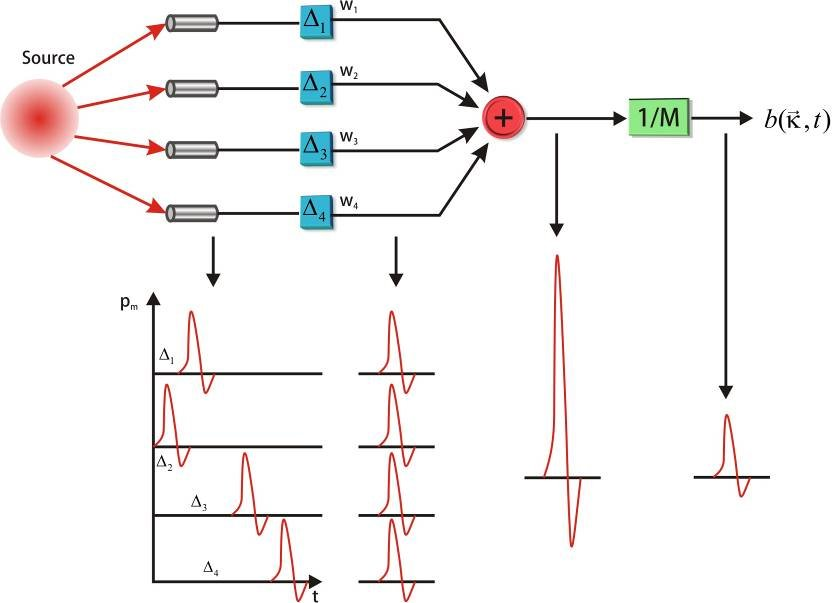
方法很简单,就是通过平移每个通道数据到合适的位置,然后累计调整系数即可。
但问题是什么?
一般采集到的麦克风数据都是数字化的,采样点的间隔是1/fs 如果要平移的时间量刚好是N个sample点,那么刚好是有对应的 采样值的 如果平移量不是,那么得考虑下面两种方案:
1、时域上做插值,根据周围的采样点来插值插出来你想要的某些平移量的数据
2、转换到频域上操作
频域上的 延时,只要对信号 相位做调整即可,
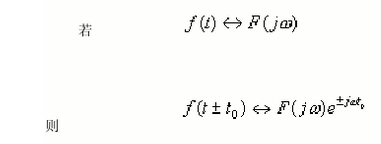
具体操作:通过fft转到频域,执行相位变换,再ifft回到时域
二、具体的matlab代码
clear all
close all
clc;
% phased.TimeDelayBeamformer
fs = 8000;
%入射角度,或者叫阵列想指向哪里,旋转角和相位角,其中相位角是离开xy平面到z轴的角度
incidentAngle = [-50;30];
%阵列采集数据
load rx
%麦克风单元数
M=11;
%阵列拓扑结构,其他任意阵列形状也可
ArrayPos = [0 0 0 0 0 0 0 0 0 0 0;
-0.2 -0.16 -0.12 -0.08 -0.04 0 0.04 0.08 0.12 0.16 0.2;
0 0 0 0 0 0 0 0 0 0 0];
%旋转角和俯仰角,
azang = incidentAngle(1,:);
elang = incidentAngle(2,:);
%导向矢量
incidentdir = [-cosd(elang).*cosd(azang);...
-cosd(elang).*sind(azang);...
-sind(elang)];
%延时时间
delay = ArrayPos.'*incidentdir/c;
pSampleRate = fs;
% x_steered = delayseq(rx,-delay,pSampleRate);
% 初始化
x=rx;
inputLength = size(x,1);
%刚好是“反“移动,对阵列本身的校准,这样就达到延迟一致了
dt = -delay;
dt = dt *fs;
%取整数延时部分(sample点数)
delayInt = round(dt); % Integer delays in samples
%分数延迟部分(sample点数,单位是个)
delayFrac = dt - delayInt;
%找到最大延迟点,数据长度因为延迟而膨胀了
maxLength = inputLength+max(0, max(delayInt)); % maximum sequence length
% Define upperbound
maxLengthLimit = maxLength;
%找到合适的fft size
nfftLimit = 2^nextpow2(2*inputLength);
output = zeros(maxLengthLimit,length(dt));
% Perform delay operation,对每个延时通道
for colI=1:length(dt)
endIdx = inputLength+delayInt(colI);
% no operation if delayed or advanced out of scope
if (endIdx <= 0) || (endIdx > 2*inputLength)
continue;
end
tmpx = x(:,colI);
%如果有分数个延时点的要求,转换到频域
if delayFrac(colI)
nfft = 2^nextpow2(inputLength + max(0, delayInt(colI)));
assert(nfft <= nfftLimit);
binStart = floor(nfft/2);
% Notice the FFT bins must belong to [-pi, pi].
fftBin = 2*pi*ifftshift(((0:nfft-1)-binStart).')/nfft;
if isscalar(tmpx) && nfft==1
tmpxd = tmpx;
else%核心代码
tmpxd = fft(tmpx,nfft);
tmpxd = ifft(tmpxd(:).*exp(-1i*dt(colI)*fftBin));
end
%以下认为正向延迟的头几个点不要,置零
%你可以认为从负时间轴(t<0) 的地方带(移)不过来数据,都是零
if delayInt(colI) >= 0
orgStart = delayInt(colI) + 1;
newStart = delayInt(colI) + 1;
else
orgStart = 1;
newStart = 1;
end
orgEnd = endIdx;
if isreal(x)
output(newStart:endIdx,colI) = real(tmpxd(orgStart:orgEnd));
else
output(newStart:endIdx,colI) = tmpxd(orgStart:orgEnd);
end
else
% Integer sampling shifting
if delayInt(colI) >= 0
orgStart = 1;
newStart = delayInt(colI) + 1;
else
orgStart = 1-delayInt(colI);
newStart = 1;
end
orgEnd = inputLength;
output(newStart:endIdx,colI) = tmpx(orgStart:orgEnd);
end
end
% output has the same length as input
x_steered = output(1:inputLength, :);
w = ones(M,1)/M;% 归一化权重
y = x_steered*conj(w);%相乘作和
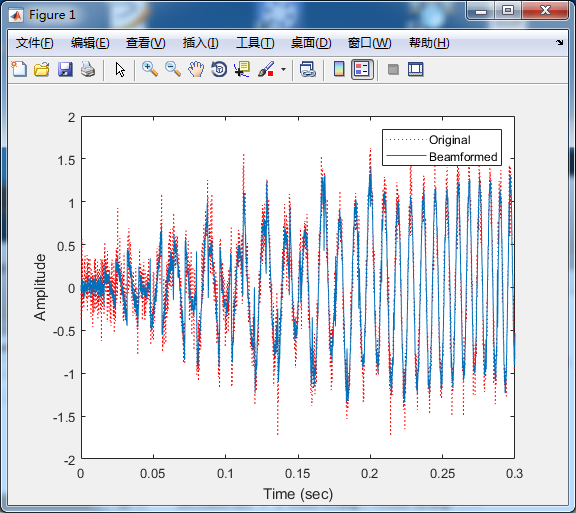
plot(t,rx(:,6),'r:',t,y)
xlabel('Time (sec)')
ylabel('Amplitude')
legend('Original','Beamformed')
最后
以上就是甜蜜硬币最近收集整理的关于最基本的麦克风阵列延时累加和算法,DelayAndSum beamformer的全部内容,更多相关最基本的麦克风阵列延时累加和算法,DelayAndSum内容请搜索靠谱客的其他文章。








发表评论 取消回复