- 第一辆车使用PreScan的Pathfollower模块,实现车道保持
- 第二辆车使用搭建的基于预瞄算法的车道保持算法,实现车道保持
仿真道路:
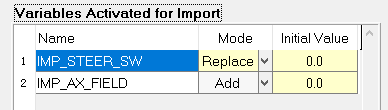
Carsim输入输出设置:

两辆车纵向上都使用简单的PI算法,输出期望纵向加速度
下面放上仿真结果:
轨迹图

还存在诸多问题,有待进行优化
最后
以上就是单身裙子最近收集整理的关于PreScan&CarSim联合仿真实现车道保持的全部内容,更多相关PreScan&CarSim联合仿真实现车道保持内容请搜索靠谱客的其他文章。
本图文内容来源于网友提供,作为学习参考使用,或来自网络收集整理,版权属于原作者所有。
![[Prescan]Prescan中Sensor学习1. Idealized Sensor2. Detailed Sensor3. Ground Truth Sensor4 Tripod5 Physics Based](https://www.shuijiaxian.com/files_image/reation/bcimg15.png)







发表评论 取消回复