车道线标志传感器,其信息由车道线与传感器扫描线的交叉点提供。具体功能与使用demo可见prescan的车道保持demo.
若要转载请注明出处.
Lane Marker Data
lane和curb lines上交叉点的数据(图中绿色和紫色的点,其中部分点用红色圈起来了),intersections最多计算4个look-ahead scan planes(车辆前方的4条黄色线), 其中look-ahead scans垂直于传感器的 boresight(车辆运行方向上的前向中心上的黄线)。 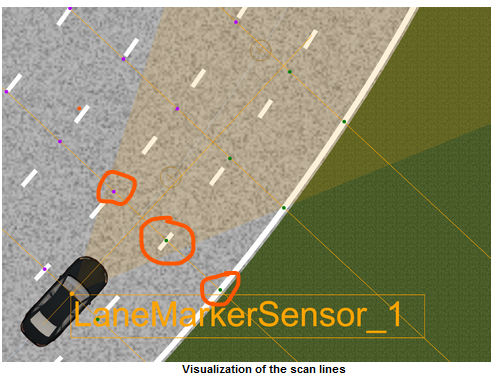
note: 该传感器是理想传感器,因而intersection data不总是在visible lane marker上,
结果中“nearest”, "left", "right"等都是相对于scan center,而不是sensor的。
每个intersection的可用数据:
- lane line type (none, lane, center or curb);
- label associated with line;
- absolute location of the intersection point;
- distance from the scan center;
- color, width, length, spacing of the marker that visualize the lane or curb line;
- heading of lane markers (in degrees)
- curvature at intersection.
Confifguration
1. sensor的位置;
2. output. (1) FOV探测的水平角度;(2) 4个scans的距离;
车道标记的可视化
车道线的可视化主要有以下几种:
| Visualization | Example | Description |
| Lane Markers (default) | 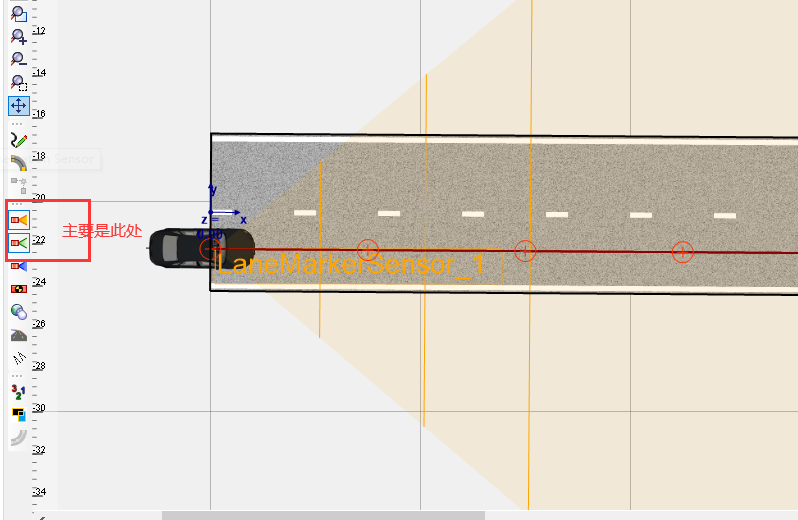 | The lane markers that are added to road segments are displayed. |
| Lane Definitions | 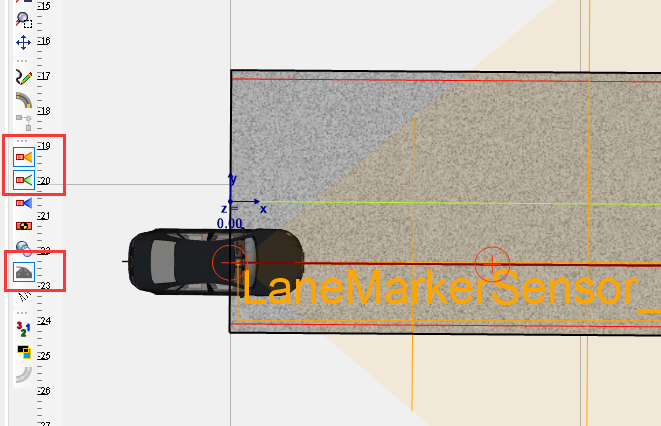 | Lane definitions are displayed that are used by the Lane Marker Sensor to find its intersection points. The lane definitions are color-coded: ·Lane lines are blue ·Center lines are green ·Curb lines are red |
| Lane Labels |  | Lane definitions are displayed along with their associated labels. Each label value is mapped to a color that is used to display both the lane definitions and label. |
车道标签的不同配置允许检测不同的情况或交通状况的变化。例如,车道标签可用于检测车辆何时驶入另一车道。可以相应地配置场景。
在构建区域中显示车道标签时,可以选择车道定义线。选择车道定义后,其类型和标签将显示在特性编辑器中,可以在其中手动设置标签。
此外,从车道定义的关联菜单中,可以使用一个选项将其标签扩展到跨多个路段的连接车道定义。
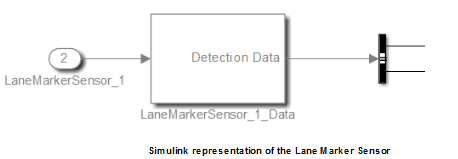
Simulink的表示
输出模块为LaneMarkerSensor_Data;
输出数据为Bus信号,需要使用"Bus Selector“来解析。
bus解析模块主要有以下部分:
| SliceCount [int] | prescan 7.6及版本的范围为0-3,之后版本调整为1-4. |
| ScanAtSensor [sub-bus: LaneMarkerSliceData] | baseline的数据 |
| ScanAtDistance 1,2,3 [sub-bus: LaneMarkerSliceData] | 4个look-ahead scan planes的其余三条线(其距离sensor的距离是自定义的) |
note: ScanAtSensor和ScanAtDistance1(, 2, 3)中的数据内容是一样的,只是不同look-ahead scan planes采集到的数据。
1 LaneMarkerSliceData
| PerformaedScan [boolean] | 是否进行过这种扫描 |
| CenterCoordinates [X,Y,Z double] | scan center的绝对位置,当它为base scan时为sensor位置 |
| RoadIdUnderSliceCenter [int] | road segment的唯一标识符,是在扫描中心正下方发现的 |
| RoadCurvatureUnderSliceCenter [double] | road segment的曲率,只适合于直线和弯曲道路,其他类型时为0. |
| SliceDistance [double] | sensor和scan center的距离---垂直的前向距离 |
| {left, right} Curbintersection [sub-bus:LaneMarkerIntersectionData] | 扫描线左右两侧,最近的curb lines的intersection data. (道路边界线) |
| LeftLaneCount, RightLaneCount [int] | 左、右侧的intersection的数量 |
| {Left, right}LeftLaneIntersection{1,2,3} [sub-bus:LaneMarkerIntersectionData] | 扫描线左右两侧,最邻近lane line(最多3个)上intersection data. (包含道路边界和所有车道线) |
注意: curbintersection和laneintersection的区别:前者是马路两侧的路线(即最外侧实线);而后者是车道线(包含马路,所有车道线)
2 LaneMarkerIntersectionData
| FoundIntersection [boolean] | 是否有intersection |
| LaneLineType [enum] | None (0), LaneLine (1), CenterLine(2), CurbLine (3) |
| Label [uint8] | 与lane definition line相关的label编号 |
| WorldCoordinate [X,Y,Z double] | intersection的绝对位置 |
| DistanceFromScanCenter [double] | intersection和slice中心的距离 |
| MarkerColor {RGB} [uint8] | 可视化道路标记的RGB颜色成分 |
| Marker {Length, Spacing, Width} [double] | lane/curb markers的尺寸;若无定义的模式,则记为0;若标记了多个,则报告最大相对面积的pattern. |
| Heading [deg] | intersection处lane markers的heading |
| Curvature | intersection处lane markers的曲率 |
note1: bus signal 是一个固定维度的;
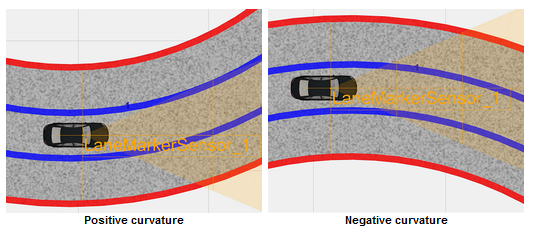
note2: 给定点的曲率是通过圆的周长拟合车道线确定的,圆半径的倒数来定义曲率。
曲率符号取决于intersection位置和圆心,如果圆心在交叉点的左边则符号为正,否则为负。即当道路从传感器的角度向左转时,曲率为正,否则为负。
最后
以上就是震动秀发最近收集整理的关于PreScan传感器(七)--Lane Marker的全部内容,更多相关PreScan传感器(七)--Lane内容请搜索靠谱客的其他文章。


![[Prescan]Prescan中Sensor学习1. Idealized Sensor2. Detailed Sensor3. Ground Truth Sensor4 Tripod5 Physics Based](https://www.shuijiaxian.com/files_image/reation/bcimg15.png)





发表评论 取消回复