ALMS提供了传感器所能看到的道路上车道线信息。其与Lane Maker Sensor(LMS)的对比:
| ALMS | LMS |
| 输出描述车道线的多项式集 | 输出intersections,可用信息受限 |
| 在高性能下,输出结果是准确度。 | 处理包括确定详细的切片相交数据,对于返回的数据来说成本相对较高。 |
| 某些点上,传感器的输出可能比真实值小,因为曲线拟合。 | 返回的intersection始终是精确的。 |
Functional description
Line clippling and splitting
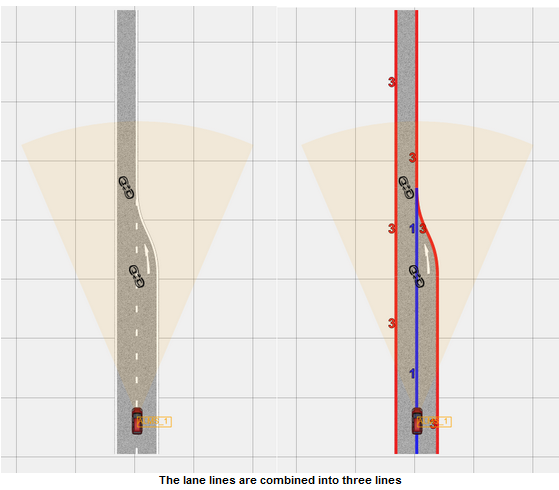
传感器只考虑FOV内的车道线部分,多次穿过FOV的线被视为单独的线。但是,在预扫描中设置的车道线标签将为检测到的线保留,并且也将显示在输出中(即车道标签的重要性)。
一条延伸到几个路段的车道线将被视为一条线;不同路段的车道线的一部分,如果它们连接在一起,并且线的标签匹配,则被合并成线。然而,如果两条或更多具有相同车道标签值的车道线有交集,那么这些车道线将被分割成新的线条,全部以交集点为终点。以下图为例进行说明,图中有3条线(使用默认标签),需要拟合3条线:
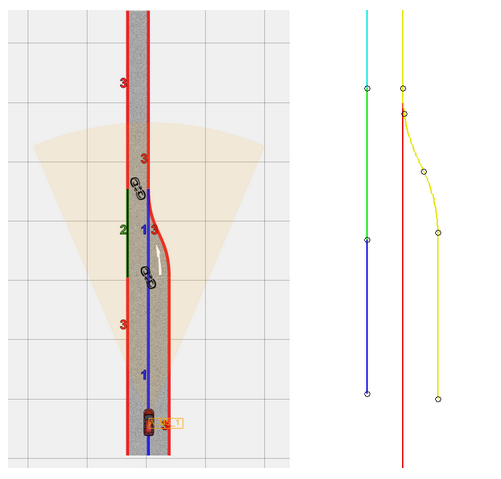
如果左侧实现的中间一段标记被改为2,则左侧车道线被分为3条分割线,需要拟合5条线。
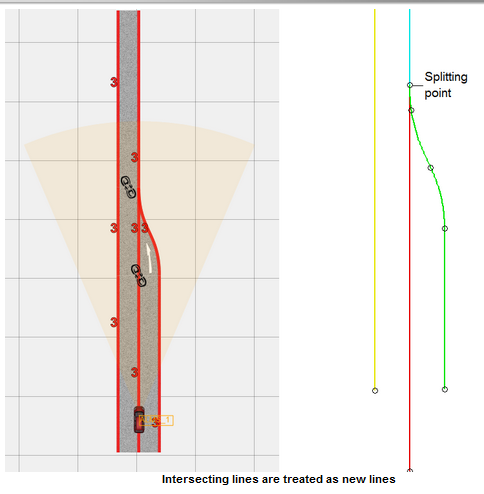
若所有线都被标记为3,右侧的线被分割为两部分,此时需要拟合4条线:
Fitting procedure
FOV内检测到的每条车道线,都企图在整个长度上拟合一组多项式。
拟合的多项式与原始线条之间的最大误差,若超过了所设误差范围,则拟合的长度就会缩短,直到拟合的误差小于限值;然后用相同的方法对剩余部分进行拟合,得到第二组...。
即根据拟合线段和误差范围,来确定当前线段被拟合为几个部分。
Polynomial output
- X Polynomial component
- Y Polynomial component
- Z Polynomial component
- Length
- GroupID
- LineLabel
X,Y,Z是包含4系数的多项式,其中L表示长度。
ALMS设置中,EMBEDDED可选以用于实时运行。
Simulink输出
ALMS Simulink Bus structure
| Header | valid | 一个消息槽是否包含一个结果(配置多项式的限值后,不会全部被填满。) | |
| Data | X | N0, N1, N2, N3, N4 | 表示多项式的系数,其中L是区间[0, length]中的一个参数。 |
| Y | N0, N1, N2, N3, N4 | ||
| Z | N0, N1, N2, N3, N4 | ||
| Length | |||
| GroupID | 允许用户分辨哪些多项式描述了同一条线。所有描述同一条线的多项式都有相同的GroupID. 其中所指的线,是FOV内的一条线,而不是一般的道路线。 | ||
| LineLabel | 为每条车道线设置的label值。 | ||
Analysis using Simulink blocks.
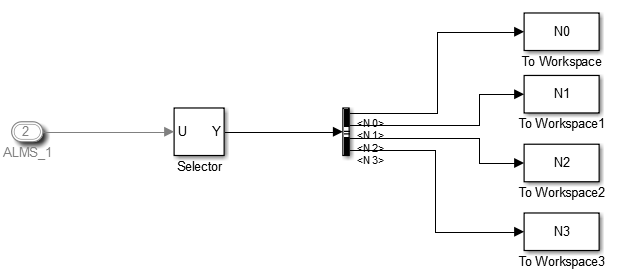
selector中选择的是拟合的线数。toworkspace中存的是这个路线上实时得到的系数。
另一种方式,是通过function得到。
此外,ALMS模块可通过ALMS XY Polynomial Plot模块,进行车道的可视化。
最后
以上就是繁荣万宝路最近收集整理的关于PreScan传感器(八)--Analytical Lane Marker的全部内容,更多相关PreScan传感器(八)--Analytical内容请搜索靠谱客的其他文章。

![[Prescan]Prescan中Sensor学习1. Idealized Sensor2. Detailed Sensor3. Ground Truth Sensor4 Tripod5 Physics Based](https://www.shuijiaxian.com/files_image/reation/bcimg15.png)






发表评论 取消回复