程序摘要
@RequestMapping(value = "/opt" , method = RequestMethod.POST)
String moveType(@RequestParam(value = "speed") int speed,@RequestParam(value = "opt") String opt) {
logger.info("{},速度为:{}",MoveTypeEnum.forward.getOptName(),speed);
new Thread(){
@Override
public void run(){
Car.opt_type(speed,opt);//小车运动
try {
Thread.sleep(5000);
} catch (InterruptedException e) {
e.printStackTrace();
}
}
}.start();
return "运动...";
}试验目标:
1.针对自主研发麦克纳姆轮,配合小车底盘,编写对应Java程序
2.提供一个java springboot的项目,打包好以后,放到树莓派中,运行,项目提供出restful风格的接口,对小车进行远程控制。
3.通过远程接口。控制小车的前进,后退,直接左向运动,直接右方向运动。
这样做,是为了后面通过集群化的方式进行处理打下基础。
定义与范围划分:
1.载体:小车底盘,轮子等非电子类物品统称为载体。
2.控制中心:树莓派称为控制中心
3.电子部件: 42步进电机,TB6600电机驱动,电源,电线等称为电子设备,驱动又称为芯片,
4.软件部分:java语言与其操作系统划分为软件部分
========================================================================
一.准备
思路:通过java web程序,通过接口的方式,控制小车的前进,停止前进功能。由于小车的轮子比较特殊,用的是麦克纳姆轮,所以可以做到直接右直行,左直行等。本文程序只有一个方向的行进,为了方便测试,提供停止运动接口。
1.控制中心
树莓派4b(对树莓派的使用不熟悉或者对java不熟悉的同学请关注专栏,可以提供一些指导)
代码编写与管理平台(方便网页控制)
2.电子设备
电机驱动TB6600*2
42步进电机 *4
电源盒(24v电源变压器或者12v电池,不能用1.5v,电压不够)
电源线若干
3.软件与程序
centos7 32位
java的运行编译环境jdk8
其中包括控制小车运动轨迹的pid算法
4.载体
麦克纳姆轮两左两右共四个
小车底盘
------------------------------------------------------------------------------------------------------------------------------------------------------------------
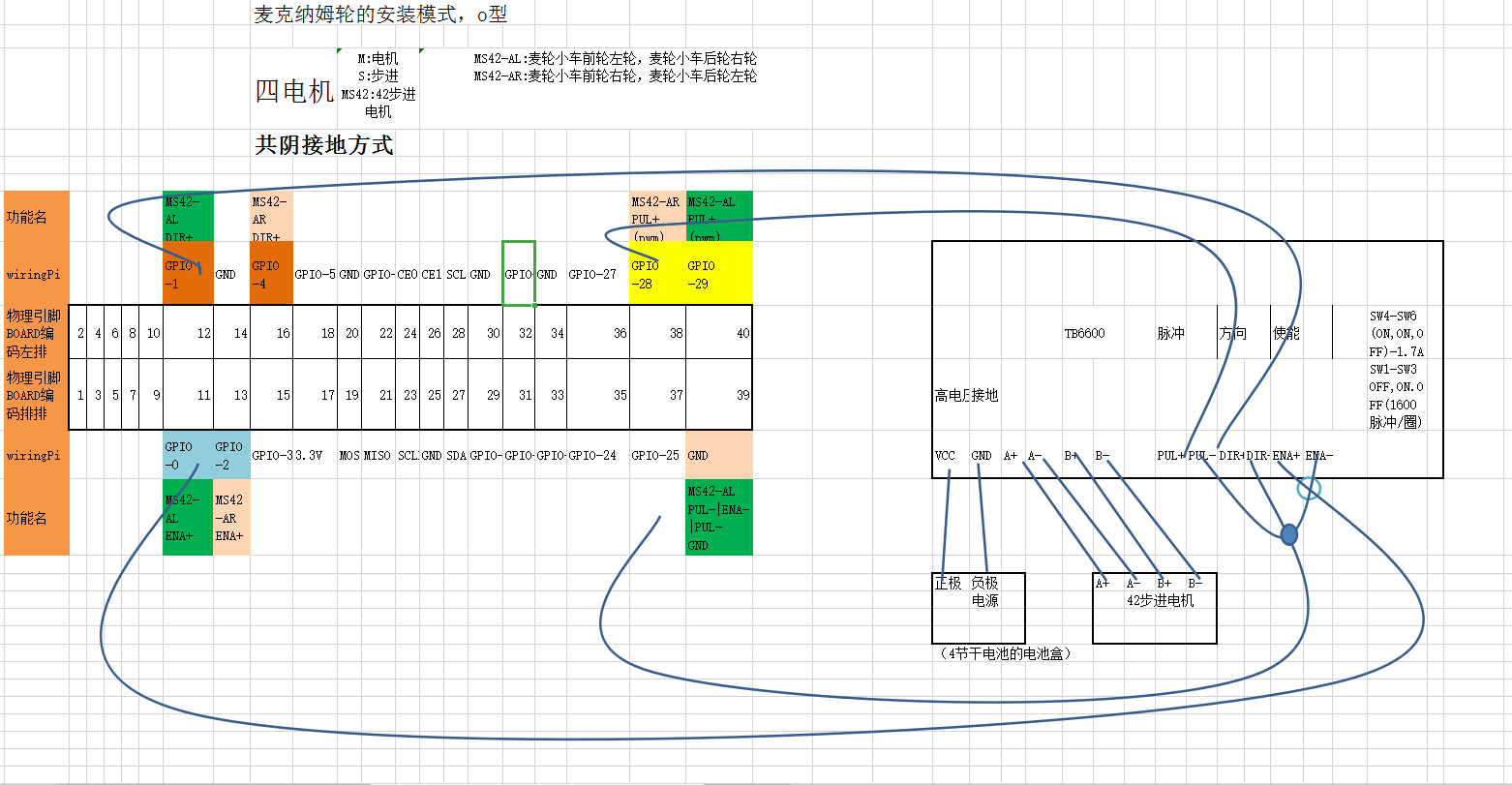
二.电路连接示意图
2.树莓派引脚示意图,GPIO与物理位序的映射

2.树莓派与TB6600连接图
3.物理图
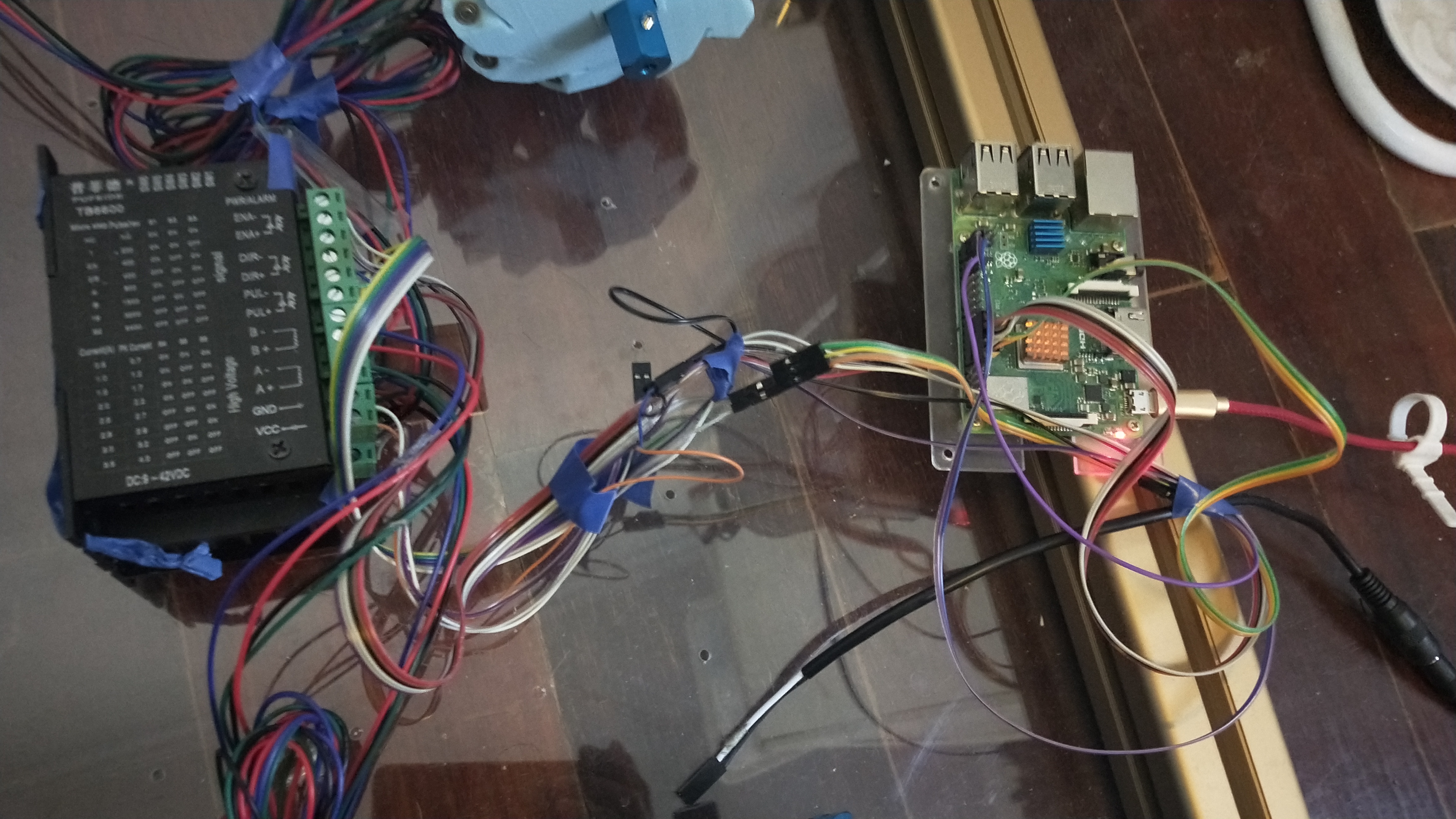
具体链接线使用了中转连接头的方式。详情请留言
4.电源
电源使用了与之前控制单个电机的方式是一样的。
5.TB6600配置
参考控制单个电机的 树莓派通过TB6600控制单个步进电机
-----------------------------------------------------------------------------------
三.程序部分
项目地址:https://github.com/jiaozg22/global-fairy-top-pi4j.git
项目框架: spring boot
中 间 件: maven,git,pi4j,wiringpi.需要在树莓派上提前安装并配置成功,才能部署运行
测试工具: jmeter
为了详细讲解代码部分,将项目进行拆分为以下几部分:pom文件,接口,核心类文件,测试文件
1.pom文件
<?xml version="1.0" encoding="UTF-8"?>
<project xmlns="http://maven.apache.org/POM/4.0.0" xmlns:xsi="http://www.w3.org/2001/XMLSchema-instance"
xsi:schemaLocation="http://maven.apache.org/POM/4.0.0 https://maven.apache.org/xsd/maven-4.0.0.xsd">
<modelVersion>4.0.0</modelVersion>
<parent>
<groupId>org.springframework.boot</groupId>
<artifactId>spring-boot-starter-parent</artifactId>
<version>2.3.3.RELEASE</version>
<relativePath/> <!-- lookup parent from repository -->
</parent>
<groupId>top.fairy.global</groupId>
<artifactId>global-fairy-top-pi4j</artifactId>
<version>0.0.1-SNAPSHOT</version>
<url>https://www.pi4j.com</url>
<name>global-fairy-top-pi4j</name>
<description>Demo project for Spring Boot</description>
<properties>
<java.version>1.8</java.version>
<project.version>1.2</project.version>
</properties>
<dependencies>
<dependency>
<groupId>org.springframework.boot</groupId>
<artifactId>spring-boot-starter-web</artifactId>
</dependency>
<dependency>
<groupId>javax.servlet</groupId>
<artifactId>javax.servlet-api</artifactId>
<version>3.1.0</version>
<scope>provided</scope>
</dependency>
<dependency>
<groupId>org.springframework.boot</groupId>
<artifactId>spring-boot-starter-test</artifactId>
<scope>test</scope>
<exclusions>
<exclusion>
<groupId>org.junit.vintage</groupId>
<artifactId>junit-vintage-engine</artifactId>
</exclusion>
</exclusions>
</dependency>
<!-- https://mvnrepository.com/artifact/com.pi4j/pi4j-core -->
<dependency>
<groupId>com.pi4j</groupId>
<artifactId>pi4j-core</artifactId>
<version>1.2</version>
</dependency>
<!-- https://mvnrepository.com/artifact/com.pi4j/pi4j-device -->
<dependency>
<groupId>com.pi4j</groupId>
<artifactId>pi4j-device</artifactId>
<version>1.2</version>
</dependency>
<!-- https://mvnrepository.com/artifact/com.pi4j/pi4j-gpio-extension -->
<dependency>
<groupId>com.pi4j</groupId>
<artifactId>pi4j-gpio-extension</artifactId>
<version>1.2</version>
</dependency>
</dependencies>
<build>
<plugins>
<plugin>
<groupId>org.springframework.boot</groupId>
<artifactId>spring-boot-maven-plugin</artifactId>
</plugin>
<plugin>
<groupId>org.apache.tomcat.maven</groupId>
<artifactId>tomcat7-maven-plugin</artifactId>
<version>2.2</version>
<configuration>
<port>8081</port>
<path>/</path>
<uriEncoding>utf-8</uriEncoding>
</configuration>
</plugin>
</plugins>
</build>
</project>
2.接口文件
package top.fairy.global.globalfairytoppi4j.action;
import com.pi4j.io.gpio.*;
import com.pi4j.util.CommandArgumentParser;
import com.pi4j.util.ConsoleColor;
import org.apache.logging.log4j.LogManager;
import org.apache.logging.log4j.Logger;
import org.springframework.boot.autoconfigure.SpringBootApplication;
import org.springframework.web.bind.annotation.RequestMapping;
import org.springframework.web.bind.annotation.RequestMethod;
import org.springframework.web.bind.annotation.RequestParam;
import org.springframework.web.bind.annotation.RestController;
import top.fairy.global.globalfairytoppi4j.basic.Car;
import top.fairy.global.globalfairytoppi4j.basic.ControlCenter;
import top.fairy.global.globalfairytoppi4j.basic.MoveTypeEnum;
import top.fairy.global.globalfairytoppi4j.utils.GpioUtil;
/**
* @author jiao_zg22
* @version 1.0
* @description 接口
* @date 2020/12/4 23:11
*/
@RestController
@SpringBootApplication
@RequestMapping(value = "/driver")
public class DriverControllor {
private static final Logger logger = LogManager.getLogger();
//这里使用@RequestMapping注解表示该方法对应的二级上下文路径
@RequestMapping(value = "/startPi", method = RequestMethod.GET)
String getUserByGet(@RequestParam(value = "userName") String userName) {
logger.info("startPi");
//检查启动的各种状态
String result= "";
// ControlCenter.linkToMotor();
return result;
}
//这里使用@RequestMapping注解表示该方法对应的二级上下文路径
@RequestMapping(value = "/opt" , method = RequestMethod.POST)
String moveType(@RequestParam(value = "speed") int speed,@RequestParam(value = "opt") String opt) {
logger.info("{},速度为:{}",MoveTypeEnum.forward.getOptName(),speed);
new Thread(){
@Override
public void run(){
Car.opt_type(speed,opt);//小车运动
try {
Thread.sleep(5000);
} catch (InterruptedException e) {
e.printStackTrace();
}
}
}.start();
return "运动...";
}
//这里使用@RequestMapping注解表示该方法对应的二级上下文路径
@RequestMapping(value = "/stop" , method = RequestMethod.GET)
String stop(@RequestParam(value = "stop") String stop) {
logger.info("操作:stop");
Car.stop();
return "运动...";
}
}
3.核心类
package top.fairy.global.globalfairytoppi4j.basic;
import com.pi4j.io.gpio.PinState;
import com.pi4j.wiringpi.SoftPwm;
import org.apache.logging.log4j.LogManager;
import org.apache.logging.log4j.Logger;
/**
* @author jiao_zg22
* @version 1.0
* @description 接口
* @date 2020/12/4 23:16
*/
public class Car {
private static final Logger logger = LogManager.getLogger();
private static ControlCenter controlCenter = new ControlCenter();
/**
*
* @description:运动
* @author: jiao_zg22
* @time: 2020/12/13 17:08
*/
public static void opt_type(int speed,String optKey){
com.pi4j.wiringpi.Gpio.wiringPiSetup();
if(MoveTypeEnum.forward.getOptKey().equals(optKey)){
// create soft-pwm pins (min=0 ; max=100)
int setSpeedErrorNO = SoftPwm.softPwmCreate(29, 0, speed);
Long timestamp = System.currentTimeMillis();
controlCenter.MS42_AL_ENA_PLUS.setState(PinState.LOW);
controlCenter.MS42_AL_DIR_PLUS.setState(PinState.LOW);
controlCenter.MS42_AR_ENA_PLUS.setState(PinState.LOW);
controlCenter.MS42_AR_DIR_PLUS.setState(PinState.HIGH);
// ControlCenter.MS42_AL_PUL_PLUS.setPwmRange(100);
// ControlCenter.MS42_AL_PUL_PLUS.setPwm(speed);
// continuous loop
while (true) {
for (int i = 1; i <= 6; i++) {
SoftPwm.softPwmStop(29);
SoftPwm.softPwmCreate(29, 0, speed);
SoftPwm.softPwmWrite(29, i);
SoftPwm.softPwmStop(28);
SoftPwm.softPwmCreate(28, 0, speed);
SoftPwm.softPwmWrite(28, i);
try {
Thread.sleep(1000);
} catch (InterruptedException e) {
e.printStackTrace();
}
timestamp = System.currentTimeMillis();
logger.info(timestamp);
}
// ControlCenter.MS42_AR_PUL_PLUS.setPwmRange(100);
// ControlCenter.MS42_AR_PUL_PLUS.setPwm(speed);
}
}else if(MoveTypeEnum.left.getOptKey().equals(optKey)){
controlCenter.MS42_AL_ENA_PLUS.setState(PinState.HIGH);
controlCenter.MS42_AL_DIR_PLUS.setState(PinState.LOW);
// ControlCenter.MS42_AL_PUL_PLUS.setPwmRange(speed);
controlCenter.MS42_AR_ENA_PLUS.setState(PinState.HIGH);
controlCenter.MS42_AR_DIR_PLUS.setState(PinState.LOW);
// ControlCenter.MS42_AR_PUL_PLUS.setPwmRange(speed);
}else if(MoveTypeEnum.right.getOptKey().equals(optKey)){
controlCenter.MS42_AL_ENA_PLUS.setState(PinState.HIGH);
controlCenter.MS42_AL_DIR_PLUS.setState(PinState.LOW);
// ControlCenter.MS42_AL_PUL_PLUS.setPwmRange(speed);
controlCenter.MS42_AR_ENA_PLUS.setState(PinState.HIGH);
controlCenter.MS42_AR_DIR_PLUS.setState(PinState.HIGH);
// ControlCenter.MS42_AR_PUL_PLUS.setPwmRange(speed);
}else if(MoveTypeEnum.back.getOptKey().equals(optKey)){
controlCenter.MS42_AL_ENA_PLUS.setState(PinState.HIGH);
controlCenter.MS42_AL_DIR_PLUS.setState(PinState.LOW);
// ControlCenter.MS42_AL_PUL_PLUS.setPwmRange(speed);
controlCenter.MS42_AR_ENA_PLUS.setState(PinState.HIGH);
controlCenter.MS42_AR_DIR_PLUS.setState(PinState.LOW);
// ControlCenter.MS42_AR_PUL_PLUS.setPwmRange(speed);
}
logger.info("运动");
}
public static String stop() {
logger.info("操作:stop");
controlCenter.MS42_AL_ENA_PLUS.setState(PinState.HIGH);
controlCenter.MS42_AR_ENA_PLUS.setState(PinState.HIGH);
// ControlCenter.MS42_AL_PUL_PLUS.setShutdownOptions(true, PinState.LOW, PinPullResistance.OFF);
// ControlCenter.MS42_AR_PUL_PLUS.setShutdownOptions(true, PinState.LOW, PinPullResistance.OFF);
controlCenter.gpio.shutdown();
// controlCenter.gpio.unprovisionPin(controlCenter.MS42_AL_PUL_PLUS,controlCenter.MS42_AR_PUL_PLUS);
return "运动停止成功";
}
public static String autoMove(int speed){
controlCenter.MS42_AL_ENA_PLUS.setState(PinState.HIGH);
controlCenter.MS42_AL_DIR_PLUS.setState(PinState.HIGH);
// controlCenter.MS42_AL_PUL_PLUS.setPwmRange(speed);
controlCenter.MS42_AR_ENA_PLUS.setState(PinState.HIGH);
controlCenter.MS42_AR_DIR_PLUS.setState(PinState.HIGH);
// controlCenter.MS42_AR_PUL_PLUS.setPwmRange(speed);
//启动自动运行处理器,进行突发事件监听,并根据情况自动调用突发事件处理程序
//TODO:JIAO_ZG22
return "自动运行中";
}
}
package top.fairy.global.globalfairytoppi4j.basic;
/**
* @author jiao_zg22
* @version 1.0
* @description 树莓派与TB6600电机的连接针脚
* 详细电路连接,请参考resources目录下的static.doc文件夹
* @date 2020/12/7 20:07
*/
public class TB6600DriverLinkPi implements LinkStrategy {
public MotorDriver driver_AL_BR = new MotorDriver();//左前,右后控制驱动
public MotorDriver driver_AR_BL = new MotorDriver();//右前,左后控制驱动
public void TB6600DriverLinkPi(){}
/**
*
* @description:生成一次连接的TB6600DriverLinkPi实例之后,后面对这次连接实例TB6600DriverLinkPi的操作,是针对相同的一组操作对象pi,chip的操作
* @author: jiao_zg22
* @time: 2020/12/8 0:02
*/
public void TB6600DriverLinkPi(MotorDriver al_br,MotorDriver ar_bl) throws Exception {
if(al_br == null || ar_bl == null){
throw new Exception("连接的芯片不能为空");
}
driver_AL_BR = al_br;
driver_AR_BL = ar_bl;
}
@Override
public void setModule(String module) {
CathodeModule cathodeModule = new CathodeModule(null);
}
@Override
public boolean link() {
ControlCenter controlCenter = new ControlCenter();
driver_AL_BR.IN_ENA_PLUS = controlCenter.MS42_AL_ENA_PLUS;
driver_AL_BR.IN_DIR_PLUS = controlCenter.MS42_AL_DIR_PLUS;
// driver_AL_BR.IN_PUL_PLUS = controlCenter.MS42_AL_PUL_PLUS;
driver_AR_BL.IN_ENA_PLUS = controlCenter.MS42_AR_ENA_PLUS;
driver_AR_BL.IN_DIR_PLUS = controlCenter.MS42_AR_DIR_PLUS;
// driver_AR_BL.IN_PUL_PLUS = controlCenter.MS42_AR_PUL_PLUS;
//TODO:jiao_zg22 判断策略
return false;
}
}
类文件比较多,需要的请到github上进行下载。如果有同学不清楚github如何使用,请关注博主专栏【编程初学者】
4.测试文件
链接:https://pan.baidu.com/s/10fpFwfoik9zx05Gy748Xsw
提取码:qujh
或者可以自己写测试接口。就是简单的post,get方式的接口
四.部署与运行
把树莓派与小车电机等组装成功以后,将代码打包成jar文件。具体的操作:
进入到开发工具如ide,运行maven,mvn clean compile package .然后找到对应的target目录下找到打包好的jar文件。
用ftp上传到树莓派/opt/software 目录下。
使用 java -jar global-fairy-top-pi4j-0.0.1-SNAPSHOT.jar 命令启动。看到端口8088启动成功。
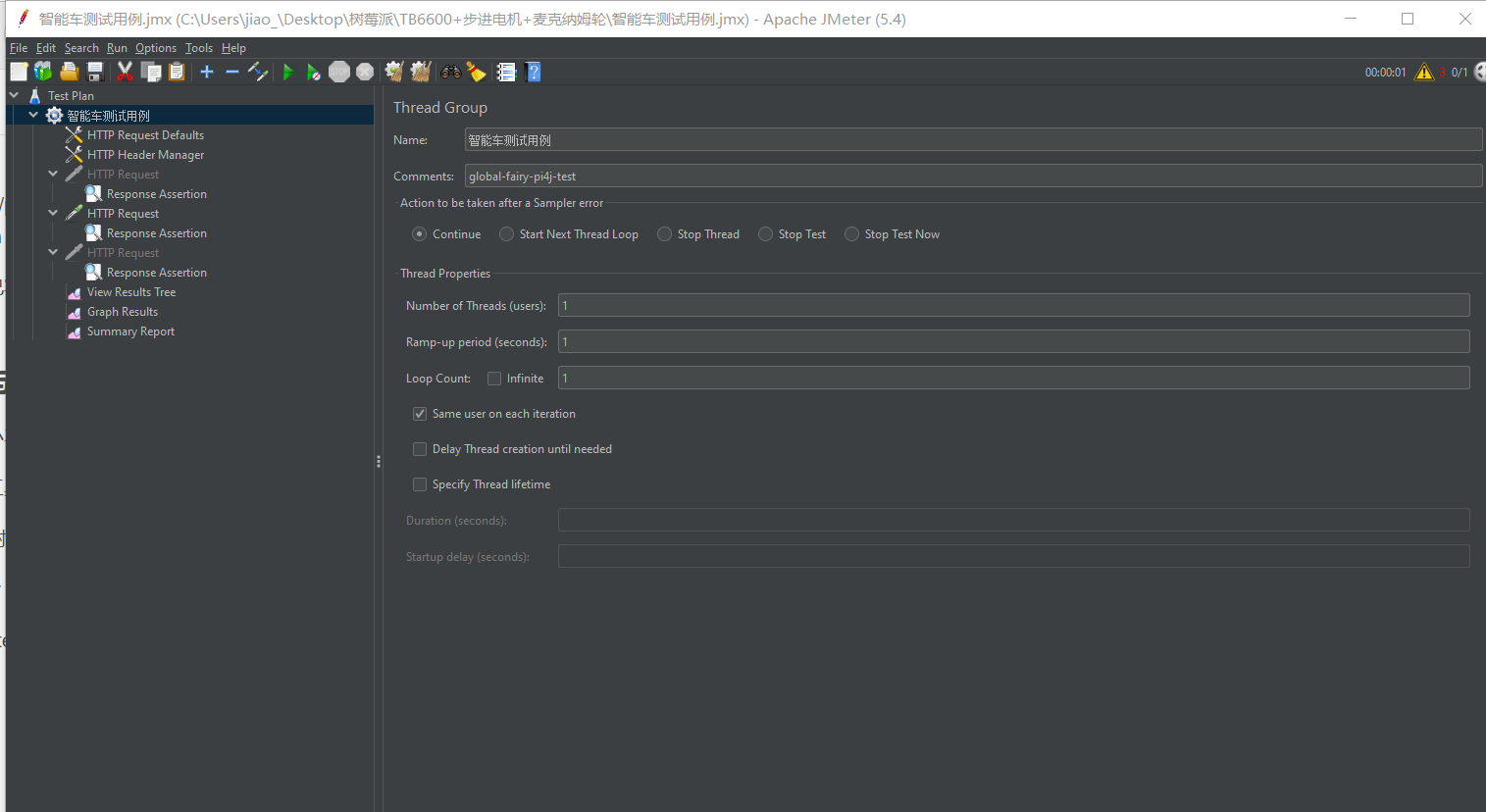
然后通过jmeter,运行绿色的执行按钮,即可启动,如果需要停止,需要将运行接口的测试用例置位disable,将stop接口置位enable
五.测试视频
演示程序
附:由于内容较多,一篇文章篇幅有限,有需要的同学可以通过私信或者留言,对于通用性的问题会补充到文章中去。需要学习的小伙伴可以留言沟通。
最后
以上就是寒冷手链最近收集整理的关于树莓派通过java控制麦克纳姆轮小车程序摘要试验目标:的全部内容,更多相关树莓派通过java控制麦克纳姆轮小车程序摘要试验目标内容请搜索靠谱客的其他文章。








发表评论 取消回复