混沌无形
混沌系统是世界本质,无形之中存在规律。机器人智能化发展从线性过渡到混沌,本号将分享机器人全栈技术(感知、规划、控制;软件、机械、硬件等)。
43篇原创内容
公众号
[文末提供原文PDF免费下载(期刊论文版式)]
摘要:不同机器人有着不同的构型,不同构型会带来性能上的差异,性能上的差异决定了其应用的场景。本文主要从本体构型及轮子等方面对常见移动机器人的内在特点进行了分析,并从灵活性、负载能力及越障能力等方面进行外在性能对比,最终结合室内外场景特征分析了所述机器人的实际应用情况,为工程师设计机器人时提供一些参考。
01

引言

在《常见移动机器人运动学模型》一文中总结了目前常见的移动机器人运动学模型,但未从构型、性能及场景等方面进行对比分析,所以本文将从上述几个方面进行对比总结,让读者在设计移动机器人平台时留有基础认识、避开部分大坑。
02

机械构型对比分析

移动机器人的机械构型相对较为简单,就是一个机架上安装了几个轮子,轮子按照设定速度转动,整个机器人平台就运动起来了。
我们之前分析移动机器人的运动学模型时,也是从轮子特性入手,结合构型上的几何约束,进而分析轮子运动与平台整体运动两者间的关系。
可以看出,移动机器人关键的两个部分就是:轮子和机架的构型。所以接下来将从这两个部分入手,深入对比分析。
2.1
常见车轮
为适应不同场景需求,不同类型的轮子被设计出来,具体如图 2.1所示,共罗列了7种轮子,这里依次介绍:
(a)普通橡胶轮
普通橡胶轮看起来最为普通,但实际应用广泛,在两轮差速驱动机器人、car-like robot及四轮驱动(4WD)机器人均采用该轮子。
普通橡胶轮表面花纹复杂,有效增大摩擦系数,有较好抓地力,且材质具有一定弹性,具备一定抗震功能,轮胎直径范围较大,越障性能较好。但轮子运动速度方向需沿着轮子外圆切线方向,并不能横移,因此运动灵活性不如万向轮。
因此,普通橡胶轮适用于室内外的大部分地形特征,也适用于速度变化范围大(高速到低速)的场景。

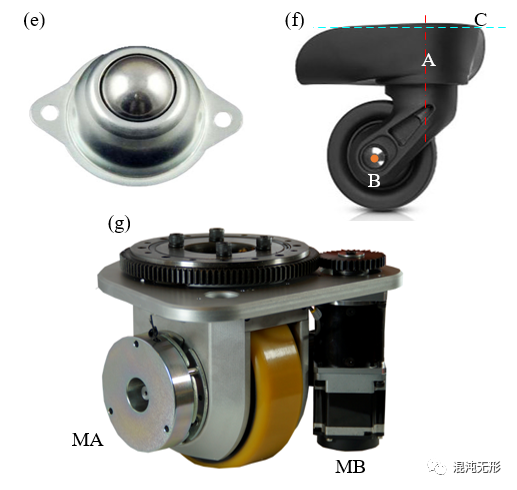
图 2.1 常见机器人轮子.(a)普通橡胶轮,(b)直行被动轮,(c)麦克纳姆轮,(d)全向轮,(e)滚珠万向轮,(f)被动万向轮,(g)舵轮(部分图片来自网络,侵删)
(b)直行被动轮
直行被动轮本质上与普通橡胶轮是相近的,普通橡胶轮的轮轴会与电机轴相连接,成为主动轮,而图 2.1(b)中的直行被动轮的轮轴是与轮架连接,没有电机驱动,因此是被动轮。
直行被动轮与普通橡胶轮都是只能沿着轮子外圆切线方向运动,不能横移。
直行被动轮在实际应用中的半径一般较小,常被应用于室内场景,例如我们的超市购物车、婴儿车的两个后轮。
(c)麦克纳姆轮
麦克纳姆轮外形炫酷,是由轮毂和外围系列辊子组成,实际运动是由轮毂转动和辊子转动两部分运动合成的,具体规律可以参考《麦克纳姆轮运动特性分析》。
麦克纳姆轮的外围辊子之间存在间隙,因此麦轮运动过程中会存在轻微的震荡,且对运动连续性也有影响。麦轮的负载能力也较弱,是因为整个机器人重量会“压”在辊子轴上,辊子轴直径很小,所以能够承受的重量也是较小的。
麦轮的构型和工艺较其他轮子更复杂,且辊子易磨损,因此成本也更高。麦轮的运动是依赖于辊子的运动的,假如麦轮在室外非结构化场景(泥土、杂草)中运动,辊子容易被杂物卡住而无法被动转动,因此麦轮主要被应用于结构化地面,如水泥地面等。
将多个麦轮按照一定规律排列组合,并按照一定规律运动,就可以达到全向移动的效果,适用于室内狭窄场景。
(d)全向轮
全向轮与麦克纳姆轮是一对“同分异构体”,全向轮的辊子轴线与轮毂轴线夹角为90度,而麦轮是45度,因此麦轮存在问题,全向轮也有,从而导致两者的应用场景也是比较接近的,故不在此赘述,具体可参考《全向轮运动特性分析》。
(e-f)万向轮
万向轮有别于全向轮,常被作为被动轮,是随着机器人的运动而被动运动的,主要作用是提供滚动功能降低运动摩擦,以及提供支撑,主要优点是能够朝向任意方向运动。
本文列举了两种:滚珠万向轮和被动万向轮。
从图 2.1(e)可以看出,滚珠万向轮的运动依赖于嵌入在轮壳内的滚珠,滚珠是标准球体,可朝向任意方向滚动,实现“万向”的效果,在TurtleBot3的前面两个轮子就是采用的滚珠万向轮,这样可以尽可能压低机器人底盘。
生活中更常见的是被动万向轮,如图 2.1(f)所示,常被用于超市购物车、婴儿车的两个后轮。这里分析两个细节:
在图 2.1(f)中,滚轮的轴线是B,滚轮转向时会绕着轴线A转动,分别对应两个自由度,轴线A和B之间是空间相互垂直的关系,但不会存在交点,即两条轴线之间存在一定距离。这是因为该距消除了A轴线死点的情况,可实现万向轮转向时需要先完成转向,再继续滚动的动作,且对滚轮的运动方向具有一定的导向调整作用,削弱了两个自由度冲突程度,如果两轴线相交,则A轴线的自由度会有存在死点,两个自由度没有主次之分,当机器人想转向时,滚轮可能会卡在A轴线死点上而无法转向,影响转向效果。
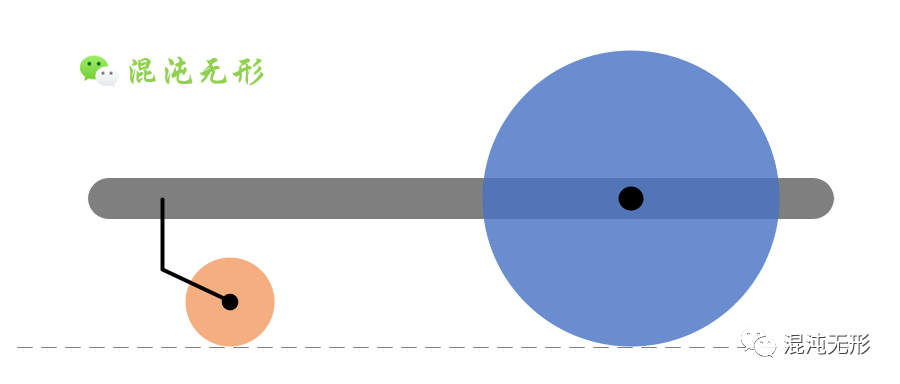 图 2.2 两轮差速驱动机器人.红色圆盘表示万向轮,蓝色圆盘表示驱动轮,深灰色区域表示机架.
图 2.2 两轮差速驱动机器人.红色圆盘表示万向轮,蓝色圆盘表示驱动轮,深灰色区域表示机架.
如图 2.2所示,实际设计机器人时,如两轮差速机器人,需要两个普通橡胶轮作为驱动轮,为保持平稳,还需要增加1-2个被动外向轮作为支撑轮。在一般的设计中,机器人底盘的高度就约等于驱动轮(普通橡胶轮)的半径,而要在底盘的下底安装被动万向轮,意味着万向轮直径是小于驱动轮的半径的,所以经常看到两轮差速机器人的左右驱动轮很大,而万向轮却很小,正由于万向轮的直径较小,所以这类机器人越障性能较弱,在过门槛或电梯时容易“翻车”。
(g)舵轮
舵轮其实是直行被动轮的升级版,在执行被动轮上增加了两个电机,电机MA用于直接驱动轮子滚动,电机MB通过齿轮组驱动驱动转向,因此舵轮是有两个自由度,且可以主动控制,即可直线运动,又可转向。
舵轮也常被应用于室内AGV,用于搬运仓库货物,通过多个舵轮组合运动,可实现全向运动。
2.2
构型对比分析
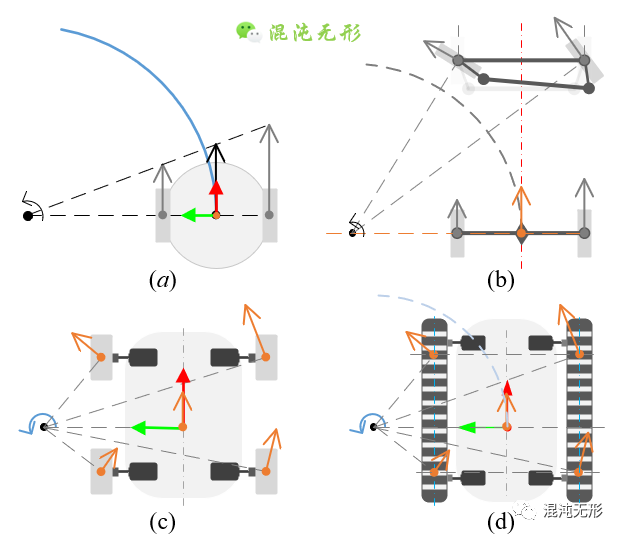
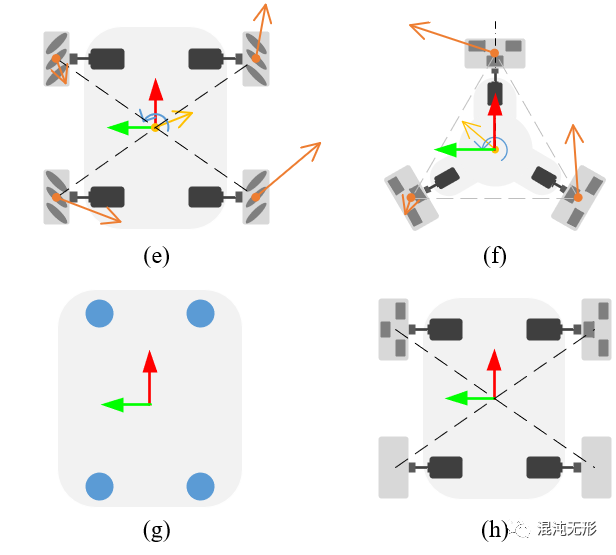
图 2.3 常见构型移动机器人.(a)两轮差速驱动机器人,(b)car-like robot,(c)四轮驱动机器人,(d)履带式机器人,(e)麦轮全向平台,(f)全向轮全向平台,(g)四驱四转机器人,(h)四驱异构机器人.
图 2.3共列出了8种类型移动机器人,其中前6种已经在之前的系列文章中详细讨论过,所以本文将简笔带过,并着重介绍后两种构型的移动机器人。
(a-d)非全向移动机器人
这四类机器人属于非全向移动机器人,意味着在平面上运动仅有2个自由度,其运动模型的相似度也较高(可参考《常见移动机器人运动学模型》)。
(e-f)全向移动机器人
这两类相对特殊,采用了麦轮/全向轮,按照一定规律控制轮子转动,则可以实现全向移动,比起上述非全向移动机器人的灵活性更好,能够在狭窄的区域运动(可参考《常见移动机器人运动学模型》)。
(g)四驱四转机器人
图 2.3(g)中的四个蓝色原点表示舵轮的位置,上述谈到每个舵轮有两个电机,分别控制轮子滚动和转向,因此这种类型的机器人也被称为四驱四转移动机器人。
四驱四转机器人相当于有8个电机在控制其运动,因此可轻松实现机器人的全向运动。相较于麦轮/全向轮全向平台,舵轮是没有辊子的,因此负载能力更强,轮子耐磨性更好,且室外非结构化场景的适应能力更强。
当然,也可以将四驱四转移动机器人的某一对角线上的一对轮子更换为被动万向轮,通过另一对角线上的一对舵轮驱动运动,这样就省掉4个电机,也能达到全向运动的效果,只是驱动功率相对降低了,成本也就降低了。
(h)四驱异构机器人
四驱异构机器人(这是笔者拟定的名字)的两前轮采用全向轮,两后轮采用普通橡胶轮,这种构型是之前在文献阅读时候偶然看到的,比较新颖。
在《四轮驱动(SSMR)移动机器人运动模型及应用分析》一文中,我们分析两左(右)侧轮的轮速需要保持一致,这样才能减少横向滑移带来的轮胎磨损,而四驱异构机器人则可以消除这种问题。
由于两前轮是采用的全向轮,当四驱异构机器人转向时,两前轮的辊子会被动滚动,从而将滑动摩擦转化为滚动摩擦,大大降低了摩擦带来的损耗。
这种类型的机器人还有两种变化,其一是两个前全向轮“去掉”电机,变成被动轮,产生的效果和“两前轮为被动万向轮”的结构相似,但是有个好处是,四个轮子的半径是相同的,越障能力比“使用被动万向轮”更好;其二是两左(右)侧的两电机合二为一,一侧仅使用一个电机,并使用同步带将电机动力传送到同侧两轮,这样就可以仅使用2个电机,实现机器人的直线或圆弧运动。
03

运动性能对比分析

3.1
速度空间对比分析
在《Car-like Robot运动模型及应用分析》等之前的文章中有分析过不同类型机器人的速度空间(相关定义介绍请参考之前的文章),可参考图 3.1,在之前的移动机器人运动学分析系列文章中谈到,本文将移动机器人按照运动约束分为两类:非全向(差速驱动)移动机器人和全向移动机器人。
其中一类移动机器人,如两轮差速驱动机器人、履带式机器人、四轮驱动机器人等,均属于差速驱动机器人的范畴,差速驱动机器人的速度空间是一个矩形,如图 3.1(a)所示,仅有直行的线速度和角速度,属于非全向移动机器人的大范畴,而car-like robot也属于非全向移动机器人的大范畴,但是其速度空间呈沙漏型,如图 3.1(b)所示,这是因为car-like robot的前轮转向角存在机构限位,使得car-like robot有最小转弯半径(无法零半径转弯——自旋转),因此car-like robot的速度空间是差速驱动机器人的速度空间的子集。
而另外一大类是全向移动机器人,包括麦轮全向移动平台、全向轮平台、四驱四转机器人等,可以沿着任意方向移动,且可自转,因此对应的速度空间是一个(实心)长方体,而非全向移动机器人的速度空间在二维平面上,比起全向移动机器人少了横向移动速度这一维度。
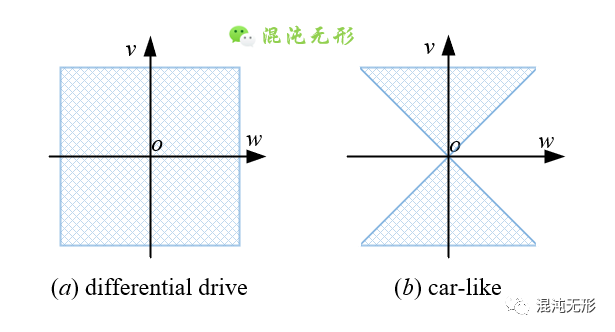
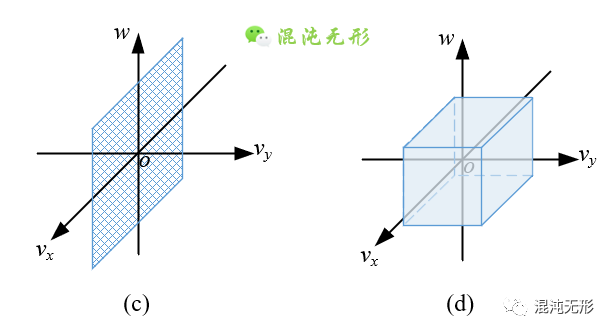
图 3.1 速度空间.(a)差速驱动机器人速度空间(2D),(b)car-like robot速度空间,(c)差速驱动机器人速度空间(3D),(d)全向平台速度空间.
速度空间范围可用于分析机器人运动性能,速度空间维度越高,则机器人运动灵活性越强,在狭窄空间中的适应能力越强,速度空间范围越大,机器人运动速度可调节范围越大,机动性越好。
3.2
其他性能对比分析
除从速度空间分析外,还可以从负载能力、越障性能等方面分析。
(1)负载能力
在负载能力方面,上述麦轮移动平台和全向轮移动平台,这两种全向移动平台的轮子较特殊,机器人所有重量最终会转化到外围辊子上,而辊子轴直径较小,所有能够承受的总重量相对较小。
在上述其他类型机器人中,负载性能最好的是履带式机器人,履带与地面接触是面接触,因此整机重量被分散到履带表面,减小了压强;而四轮驱动机器人及car-like robot的负载性能次之,均为四个普通橡胶轮胎负载整机重量,与地面接触近似为线接触,压强较大;最差的是两轮差速驱动机器人,该机器人会采用1-2个万向轮,万向轮一般是比驱动轮小,因此压强较大,负载能力也相对较弱。
(2)越障能力
在越障方面,主要看驱动力及整机稳定性两方面因素。驱动力主要看电机数量、功率及其驱动力分布,稳定性主要看整机构型的对称性及重心高度。在这里主要讨论室外非结构化的场景(暂时忽略轮子大小的影响):
越障性能最好的是履带式机器人,结构对称,重心较低,且履带与地面接触面积大,接触点均可提供行进动力;四轮驱动机器人越障性能相对弱之,与履带机器人的差别在于与地面接触的面积,四轮驱动机器人与地面接触是四个小面,仅通过这四个小面提供驱动力,当某一轮子腾空后,将失去部分动力;而car-like robot要更弱一些,因为只有两后轮才是驱动轮,两前轮是被动滚动,驱动力相对较弱。
两轮差速驱动机器人一般为三轮底盘,在越障时容易侧翻,且两轮差速驱动机器人底盘多为圆形或正方形,底盘面积一般会比其他类型机器人小,因此在搭载相同体积的负载时,两轮差速驱动机器人的高度会更高,重心相比于其他机器人不够稳定,也就不适合爬坡、过坎等场景。
最后是麦轮移动平台和全向轮移动平台,这两者就不适合在室外沙土等非结构化环境运动。
04

场景应用对比分析

不同机器人的构型不同,各方面的性能也存在差异,因此应用的场景也是不同的。
4.1
室内场景
麦轮移动平台和全向轮移动平台主要应用在室内场景,比如仓库搬运、机器人竞赛等领域,该领域可充分发挥其机动、灵活的优点。
四驱四转机器人也主要作为货物搬运AGV、自动停车AGV被应用在室内场景,也是得益于其运动灵活、负载能力较强的优点。
两轮差速驱动机器人常被作为迎宾接待机器人的底盘、科研验证测试平台,也主要应用于室内场景,因其底盘上的万向轮较小,越障性能偏弱,不适合室外场景。
此外,从轮子的耐磨性角度考虑,麦轮、全向轮、万向轮、舵轮不如普通橡胶轮耐磨,因此使用这些轮子的机器人,最好还是在应用在室内场景。
从灵活性角度考虑,室内多存在狭窄通行的场景,因此应该选择灵活性好、运动速度要求不高的移动平台。
4.2
室外场景
除上述机器人外,剩余的机器人均常被应用于室外场景,其实也可以应用于室内场景,只是在室外场景应用中更有优势。
如car-like robot,速度空间面积偏小,灵活性欠佳,在狭窄区域的通过性较差,而在室外场景中,如普通道路等(硬质路面),就非常适合car-like robot,高低速均可满足,且控制相对简单,常被作为无车人平台进行实验测试。
履带式机器人和四轮驱动机器人相似,更适合在非结构化(软质)地面上运动,因为这两种机器人在转向过程中,对地面的横向摩擦较大,如果在硬质地面,会对轮胎、履带造成严重的磨损,而在软质地面则可以减轻磨损,且履带式机器人和四轮驱动机器人动力较强,更适合障碍物较多的野外非结构化场景,因此常被应用于野外科考、排爆侦察等场景。
05

结论及展望

机器人构型、特性及应用场景之间是存在因果关系的,三者之间总是尽可能相互适配,以满足某一现实需求。本文总结了常见的移动机器人轮子及构型的特点,并从灵活性、负载能力、越障能力等方面进行了对比分析,最后结合室内、室外等场景特征及其机器人特点分析了不同机器人的常见用途,给工程师读者们设计机器人时提供一种参考。
(文章仅笔者个人分析,有误请指正,谢谢!)
福利放送
笔者为小伙伴们整理了期刊论文版式原文PDF,方便收藏和回味
链接:https://pan.baidu.com/s/1snUAy9EsugSlvMqOjfRENw
提取码:645t
若链接失效,可在后台回复关键字:13464ED或发送邮件:Zippen-Huang@outlook.com
延伸阅读
常见移动机器人运动学模型总结
麦克纳姆轮全向移动机器人运动模型及应用分析
麦克纳姆轮运动特性分析
全向轮运动特性分析
全向轮机器人运动模型及应用分析
Car-like Robot运动模型及应用分析
履带式机器人运动模型及应用分析
两轮差速驱动机器人运动模型及应用分析
可重构全向移动机器人
-----------------------------------------------------------------------------
相关声明
1.如果转载本文,文末务必注明:“转自微信公众号:混沌无形”
2.若有侵权,请联系作者

全文完,感谢阅读!!如果觉得写的不错,那就点个赞或者“在看”吧。
混沌无形
混沌系统是世界本质,无形之中存在规律。机器人智能化发展从线性过渡到混沌,本号将分享机器人全栈技术(感知、规划、控制;软件、机械、硬件等)。
43篇原创内容
公众号
最后
以上就是缓慢皮卡丘最近收集整理的关于常见移动机器人多角度对比分析的全部内容,更多相关常见移动机器人多角度对比分析内容请搜索靠谱客的其他文章。








发表评论 取消回复