cartographer建图室外gps+scan的数据不应该是二维激光雷达hokuyo,而是三维激光雷达 Velodyne(16线的),所以,先学习三维,简单使用,今天先跑gps的数据测试。
1、改初始位置
东北天方向对应xyz轴
在输出的北方和东方进行相应的修改:
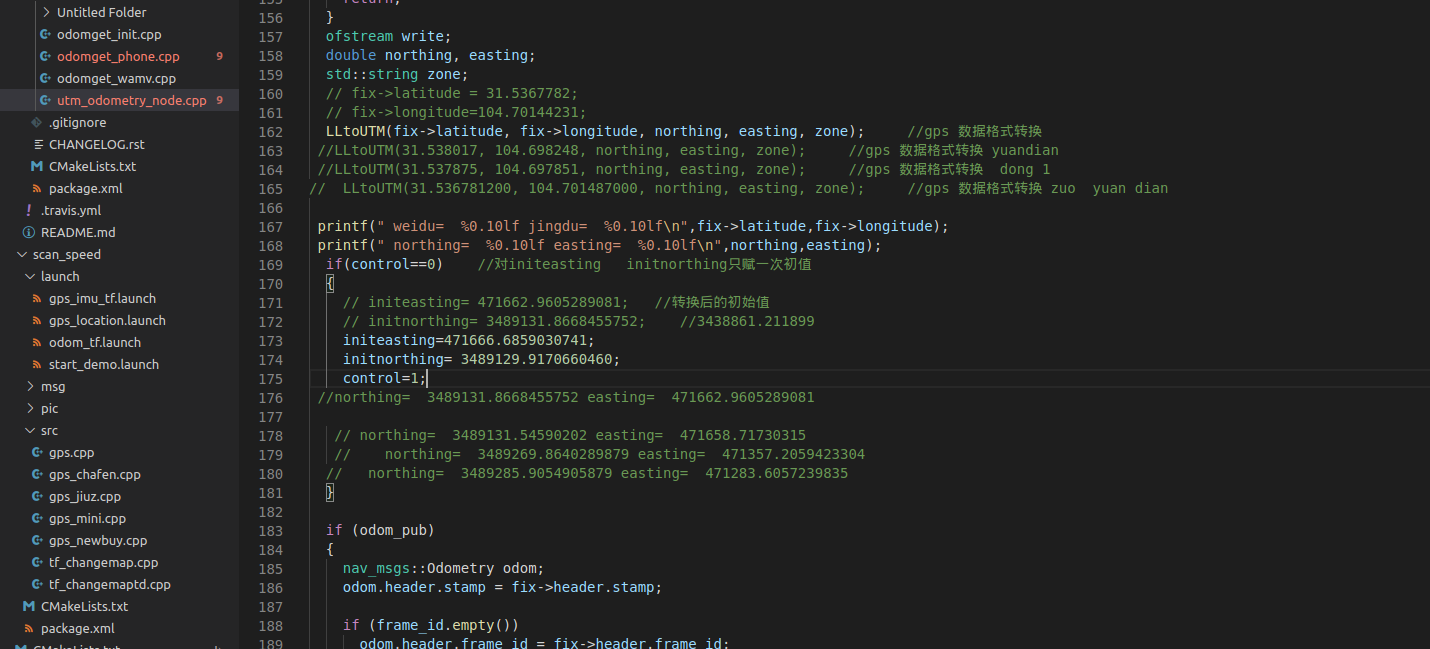 上面的初始位置设置,对应odom的xy值。
上面的初始位置设置,对应odom的xy值。
初始设置完成之后,运行gps的launch文件,echo odom值的xy应该为0.
2、运行
roslaunch scan_speed gps_location.launch
rostopic echo /odom
可以看到odom的值
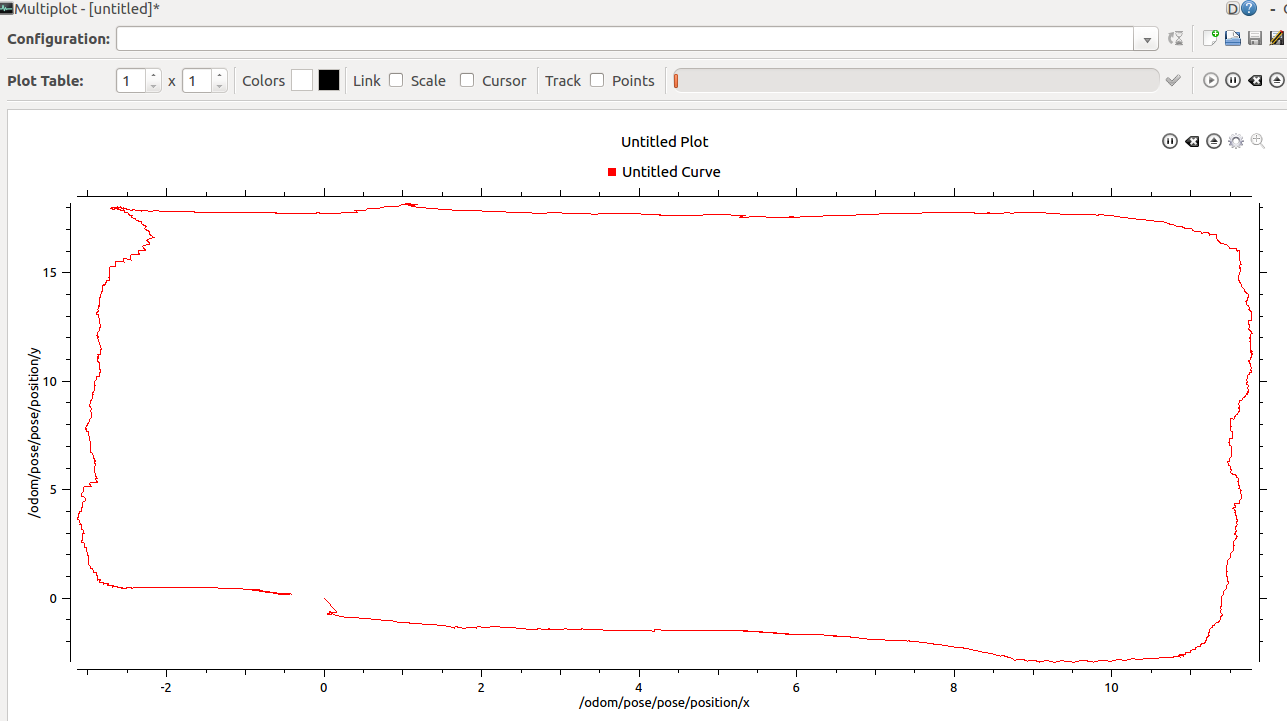
3、结果
录制bag包,走矩形轨迹,如图:
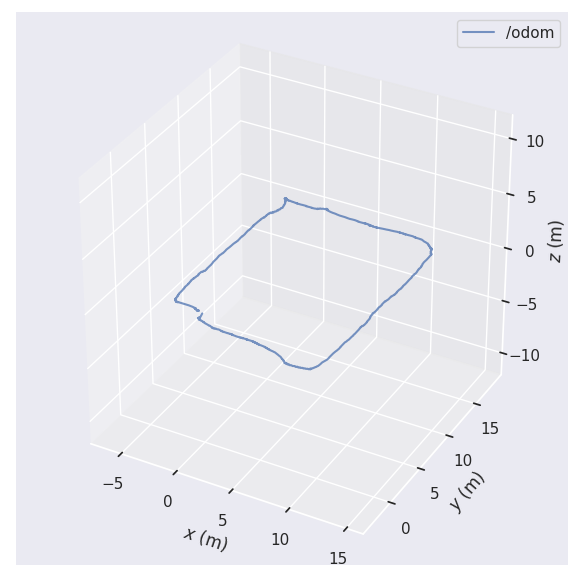
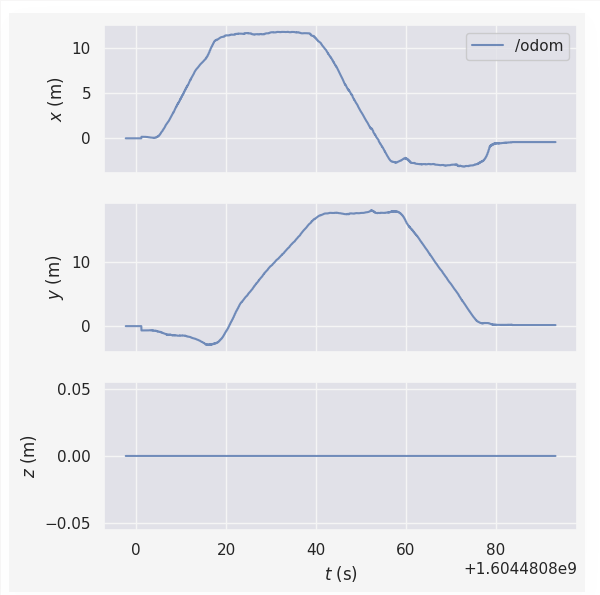
在天气良好的情况下,差分模式,精度高,达到厘米级
天气不好的情况下,单点模式,精度不好,达到米级
最后
以上就是顺心小刺猬最近收集整理的关于组合导航gps/imu输出odom的测试的全部内容,更多相关组合导航gps/imu输出odom内容请搜索靠谱客的其他文章。
本图文内容来源于网友提供,作为学习参考使用,或来自网络收集整理,版权属于原作者所有。








发表评论 取消回复