我是靠谱客的博主 顺心小刺猬,这篇文章主要介绍6.STM32freeRTOS---动态/静态创建任务与删除前言一、动态创建任务与删除二、静态创建任务与删除遇到的问题,现在分享给大家,希望可以做个参考。
文章目录
- 前言
- 一、动态创建任务与删除
- 二、静态创建任务与删除
- 1.
- 遇到的问题
前言
本次实验用来熟悉任务创建和删除的API。
一、动态创建任务与删除
#include "sys.h"
#include "usart.h"
#include "led.h"
#include "delay.h"
#include "FreeRTOS.h"
#include "task.h"
#define start_task_size 52
#define start_task_pro 1
TaskHandle_t startTask_handler;
void start_task(void *pram);
#define led_task1_size 100
#define led_task1_pro 3
TaskHandle_t ledTask1_handler;
void led_task1(void *pram);
#define led_task2_size 100
#define led_task2_pro 2
TaskHandle_t ledTask2_handler;
void led_task2(void *pram);
int main(void)
{
delay_init(); //延时函数初始化
uart_init(115200); //初始化串口
LED_Init(); //初始化LED
xTaskCreate(
(TaskFunction_t )start_task,
(const char * ) "start_task",
(uint16_t )start_task_size ,
(void * )NULL,
(UBaseType_t ) start_task_pro,
(TaskHandle_t * )startTask_handler );
vTaskStartScheduler();//开始任务调度
}
/*88888888888888888888888888888888888888888888888888888888888888888888*/
void start_task(void *pram)
{
BaseType_t Return;
taskENTER_CRITICAL();
xTaskCreate(
(TaskFunction_t )led_task1,
(const char * ) "led_task1",
(uint16_t )led_task1_size ,
(void * )NULL,
(UBaseType_t ) led_task1_pro,
(TaskHandle_t * )ledTask1_handler );
Return = xTaskCreate(
(TaskFunction_t )led_task2,
(const char * ) "led_task2",
(uint16_t )led_task2_size ,
(void * )NULL,
(UBaseType_t ) led_task2_pro,
(TaskHandle_t * )ledTask2_handler );
if(Return == pdPASS)
{
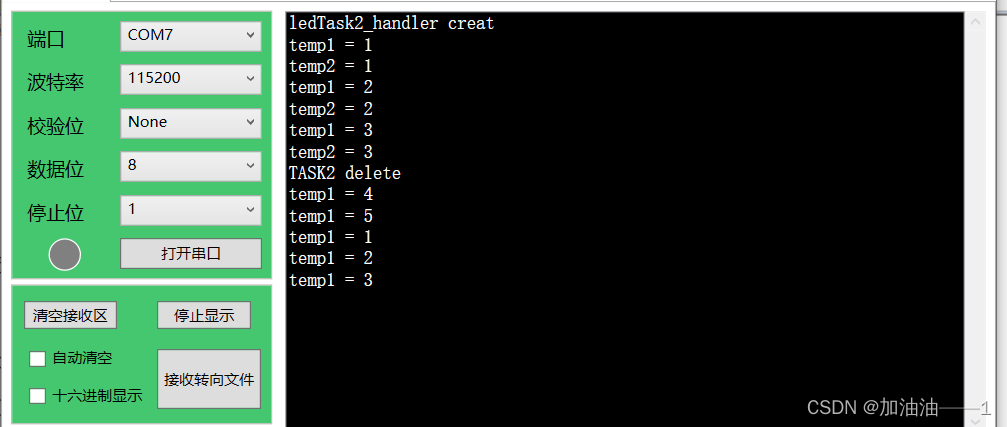
printf("ledTask2_handler creat n");
}
vTaskDelete(NULL);
taskEXIT_CRITICAL();
}
void led_task1(void *pram)
{
uint8_t temp1 = 0;
while(1)
{
temp1 += 1;
printf("temp1 = %dn",temp1);
if(temp1 == 5)
{
temp1 = 0;
}
vTaskDelay(1000);
}
}
void led_task2(void *pram)
{
uint8_t temp2 = 0;
while(1)
{
temp2 += 1;
printf("temp2 = %dn",temp2);
if(temp2 == 3)
{
temp2 = 0;
printf("TASK2 delete n");
vTaskDelete(NULL);
}
vTaskDelay(1000);
}
}
注意:这里的任务是自杀式删除。
二、静态创建任务与删除
1.
#include "sys.h"
#include "usart.h"
#include "led.h"
#include "delay.h"
#include "FreeRTOS.h"
#include "task.h"
#define start_task_size 52
#define start_task_pro 1
StackType_t startStack[start_task_size];
StaticTask_t startTaskTCB;
TaskHandle_t startTask_handler;
void start_task(void *pram);
#define task1_size 52
#define task1_pro 3
StackType_t task1Stack[task1_size];
StaticTask_t task1TaskTCB;
TaskHandle_t Task1_handler;
void task1(void *pram);
#define task2_size 52
#define task2_pro 2
StackType_t task2Stack[task2_size];
StaticTask_t task2TaskTCB;
TaskHandle_t Task2_handler;
void task2(void *pram);
// 空闲任务堆栈
static StackType_t IdleTaskStack[configMINIMAL_STACK_SIZE];
//空闲任务控制块
static StaticTask_t IdleTaskTCB;
/*
//定时器服务任务堆栈
static StackType_t timerTaskStack[configTIMER_TASK_STACK_DEPTH];
//定时器服务任务控制块
static StaticTask_t timerTaskTCB;
*/
//获取空闲任务堆栈和任务控制块。
void vApplicationGetIdleTaskMemory(StaticTask_t **ppxIdleTaskTCBBuffer,
StackType_t **ppxIdleTaskStackBuffer,
uint32_t *pulIdleTaskStackSize)
{
*ppxIdleTaskTCBBuffer = &IdleTaskTCB;
*ppxIdleTaskStackBuffer = IdleTaskStack;
*pulIdleTaskStackSize = configMINIMAL_STACK_SIZE;
}
/*
//获取定时器任务堆栈和任务控制块。
void vApplicationGetTimerTaskMemory(StaticTask_t **ppxTimerTaskTCBBuffer,
StackType_t **ppxTimerTaskStackBuffer,
uint32_t *pulTimerTaskStackSize)
{
*ppxTimerTaskTCBBuffer = &timerTaskTCB;
*ppxTimerTaskStackBuffer = timerTaskStack;
*pulTimerTaskStackSize = configTIMER_TASK_STACK_DEPTH;
}
*/
int main(void)
{
delay_init(); //延时函数初始化
uart_init(115200); //初始化串口
LED_Init(); //初始化LED
startTask_handler = xTaskCreateStatic(
(TaskFunction_t) start_task,
( char * ) "start_task",
( uint32_t) start_task_size,
(void * )NULL,
(UBaseType_t) start_task_pro,
(StackType_t * ) startStack,
(StaticTask_t * )&startTaskTCB );
vTaskStartScheduler();//开始任务调度
}
/*88888888888888888888888888888888888888888888888888888888888888888888*/
void start_task(void *pram)
{
taskENTER_CRITICAL();
xTaskCreateStatic(
(TaskFunction_t) task1,
( char * ) "task1",
( uint32_t) task1_size,
(void * )NULL,
(UBaseType_t) task1_pro,
(StackType_t * ) task1Stack,
(StaticTask_t * )&task1TaskTCB );
xTaskCreateStatic(
(TaskFunction_t) task2,
( char * ) "task2",
( uint32_t) task2_size,
(void * )NULL,
(UBaseType_t) task2_pro,
(StackType_t * ) task2Stack,
(StaticTask_t * )&task2TaskTCB );
vTaskDelete(NULL);
taskEXIT_CRITICAL();
}
void task1(void *pram)
{
uint8_t temp1 = 0;
while(1)
{
temp1 += 1;
printf("temp1 = %dn",temp1);
if(temp1 == 5)
{
temp1 = 0;
}
vTaskDelay(1000);
}
}
void task2(void *pram)
{
uint8_t temp2 = 0;
while(1)
{
temp2 += 1;
printf("temp2 = %dn",temp2);
if(temp2 == 3)
{
temp2 = 0;
printf("TASK2 delete n");
vTaskDelete(NULL);
}
vTaskDelay(1000);
}
}
注意:
静态任务的创建与动态任务的创建的区别在于:动态是编译器帮助堆栈的分配,但是静态就需要我们自己去手动分配一个堆栈。
这就需要运用到一个:vApplicationGetIdleTaskMemory这个函数来手动分配堆栈。
遇到的问题
(1)我想要通过任务1来删除任务2,但是把任务1自己删除了。但是经过排查,可以确定的是,任务2是成功创建了的。原因现在暂时还不清楚。
最后
以上就是顺心小刺猬最近收集整理的关于6.STM32freeRTOS---动态/静态创建任务与删除前言一、动态创建任务与删除二、静态创建任务与删除遇到的问题的全部内容,更多相关6.STM32freeRTOS---动态/静态创建任务与删除前言一、动态创建任务与删除二、静态创建任务与删除遇到内容请搜索靠谱客的其他文章。
本图文内容来源于网友提供,作为学习参考使用,或来自网络收集整理,版权属于原作者所有。








发表评论 取消回复