ubuntu16.04 kinetic
showpath
#include <ros/ros.h>
#include <ros/console.h>
#include <nav_msgs/Path.h>
#include <nav_msgs/Odometry.h>
#include <std_msgs/String.h>
#include <geometry_msgs/Quaternion.h>
#include <geometry_msgs/PoseStamped.h>
#include <tf/transform_broadcaster.h>
#include <tf/tf.h>
nav_msgs::Path path;
ros::Publisher path_pub;
void odomCallback(const nav_msgs::Odometry::ConstPtr& odom)
{
geometry_msgs::PoseStamped this_pose_stamped;
this_pose_stamped.pose.position.x = odom -> pose.pose.position.x;
this_pose_stamped.pose.position.y = odom -> pose.pose.position.y;
this_pose_stamped.pose.position.z = odom -> pose.pose.position.z;
this_pose_stamped.pose.orientation = odom -> pose.pose.orientation;
this_pose_stamped.header.stamp = ros::Time::now();
this_pose_stamped.header.frame_id = "map";
path.poses.push_back(this_pose_stamped);
path.header.stamp = ros::Time::now();
path.header.frame_id = "map";
path_pub.publish(path);
printf("path_pub:");
printf("odom %.3lf %.3lf %.3lfn", odom->pose.pose.position.x, odom->pose.pose.position.y, odom->pose.pose.position.z);
}
int main (int argc, char **argv)
{
ros::init (argc, argv, "showpath_odom");
ros::NodeHandle ph;
path_pub = ph.advertise<nav_msgs::Path>("trajectory_odom", 10, true);
ros::Subscriber odomSub = ph.subscribe<nav_msgs::Odometry>("/odom", 10, odomCallback); //订阅里程计话题信息
ros::Rate loop_rate(50);
while(ros::ok())
{
ros::spinOnce();
loop_rate.sleep();
}
return 0;
}
编译之后
rosrun showpath_odom showpath_odom
运行结果如下
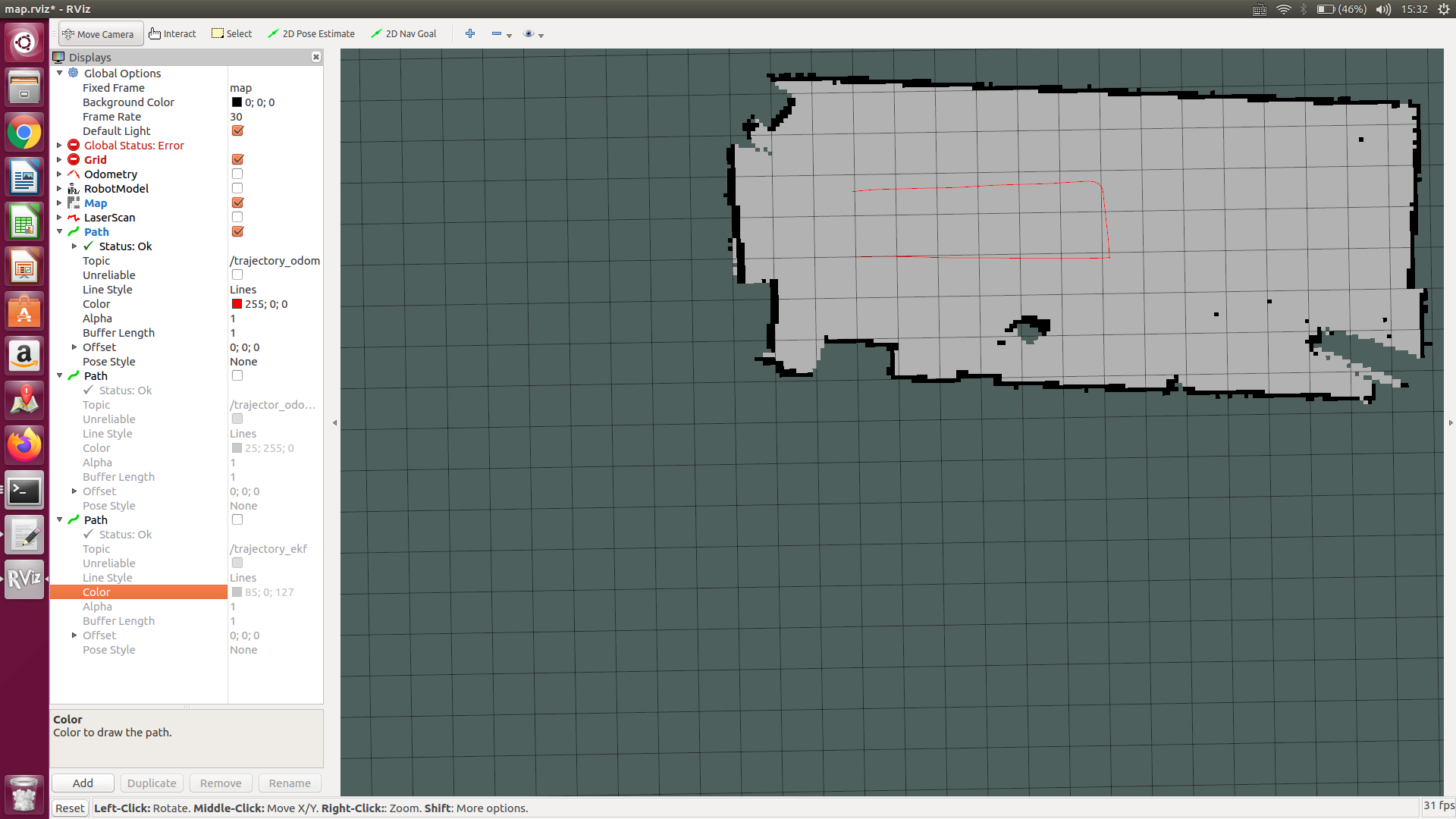
然后打开RVIZ,点add ->path ,选择话题订阅trajectory_odom,运行小车,就能看到在rviz中的轨迹了,此算法包括但不仅限于记录odom发布的轨迹,同感修改订阅消息,也可完成动作或者其他问题的轨迹获取。
代码在这https://download.csdn.net/download/weixin_42638797/20299508
最后
以上就是沉静音响最近收集整理的关于ROS订阅odom里程计消息,并在RVIZ中显示轨迹的全部内容,更多相关ROS订阅odom里程计消息内容请搜索靠谱客的其他文章。
本图文内容来源于网友提供,作为学习参考使用,或来自网络收集整理,版权属于原作者所有。








发表评论 取消回复