LQR控制器比PID要高级的一种算法,笔者找了一些资料,也做了一些笔记。如下:
离散LQR求解过程如下所示:
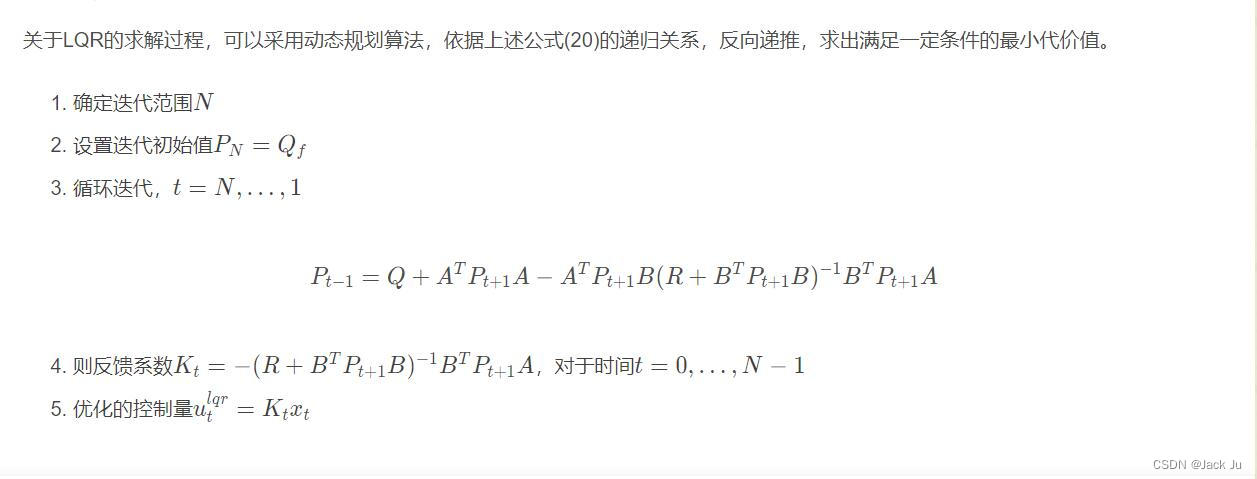
(一)流程需要求解黎卡提方程,即为第三步,关于黎卡提方程的离散求解伪代码如下(包含整个LQR步骤):
LQR(Actual State x, Desired State xf, Q, R, A, B, dt):
x_error = Actual State x – Desired State xf
Initialize N =( ##)最后
以上就是洁净往事最近收集整理的关于自动驾驶-LQR工程实现(调研)的全部内容,更多相关自动驾驶-LQR工程实现(调研)内容请搜索靠谱客的其他文章。
本图文内容来源于网友提供,作为学习参考使用,或来自网络收集整理,版权属于原作者所有。








发表评论 取消回复