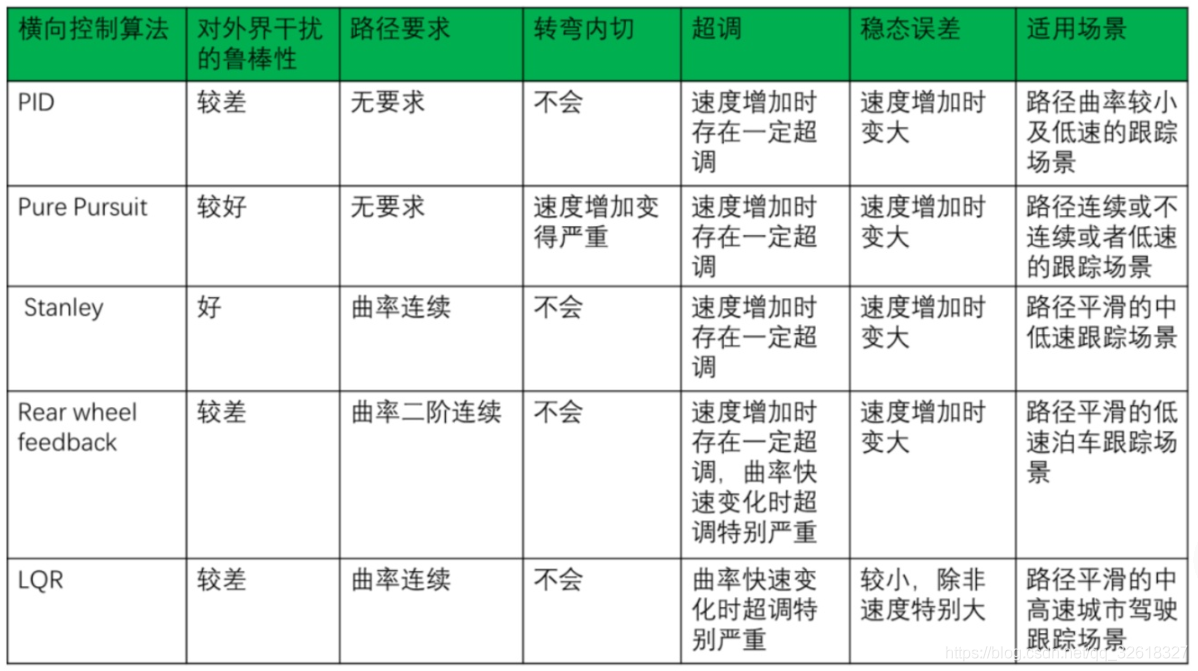
我是靠谱客的博主 含蓄咖啡豆,这篇文章主要介绍常见横向控制算法的适用场景及其优缺点1,LQR:2,MPC vs LQR vs PID:3,Pure Pursuit:,现在分享给大家,希望可以做个参考。
1,LQR:
适用场景:
曲率,曲率,曲率
路径曲率较小并连续且不能变化过快,故非常适合中高速的城市驾驶跟踪场景
2,MPC vs LQR vs PID:
LQR:
(1)计算未来固定时间段内的最优,只计算一次,执行所有计算出的控制序列,没有考虑执行时产生的误差以及干扰对于系统的影响。
(2)LQR模型没有约束,只能通过后处理加约束
(3)LQR没有约束,不是转化为QP问题进行求解,而是通过求解Riccati黎卡提方程,最终u = -kx进行求解
MPC:
(1)计算未来一小段时间内的最优,只执行第一个序列的控制值,下一个周期继续滚动计算最优控制序列。
(2)MPC模型有约束,可以添加多个约束
(3)MPC最终转化为QP问题,调用工具求解器进行求解
PID:
只关注当前时刻的误差,不关注未来时间段内的误差,没有预见性,易造成超调和“画龙”现象。
3,Pure Pursuit:
适用场景:
低速,低速,低速,速度过高易产生转弯内切以及超调
最后
以上就是含蓄咖啡豆最近收集整理的关于常见横向控制算法的适用场景及其优缺点1,LQR:2,MPC vs LQR vs PID:3,Pure Pursuit:的全部内容,更多相关常见横向控制算法的适用场景及其优缺点1,LQR:2,MPC内容请搜索靠谱客的其他文章。
本图文内容来源于网友提供,作为学习参考使用,或来自网络收集整理,版权属于原作者所有。








发表评论 取消回复