利用滑膜控制器实现舵机的角度控制与代码实现
一:滑模控制器的三大优点
1:在被控对象参数发生变化或者受到外界干扰而引起的扰动时表现为不灵敏。
2:不需要对被控系统进行在线的辨识。
3:物理实现简单
二:滑膜控制器的缺点及来源
容易在滑膜面出现高频抖振的现象。
来源:1:自身开关特性的影响;2:系统惯性与延迟
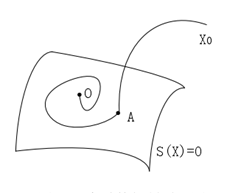
三:解决高频抖振的方法
1:准滑膜动态法:在边沿内侧采用饱和函数替代切换函数。
2:趋近率方法
3:滤波方法
…
四:利用滑膜控制器实现舵机的角度控制
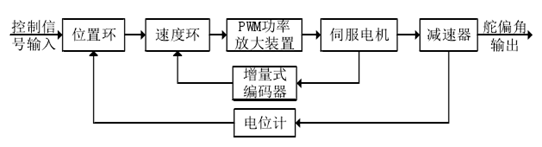
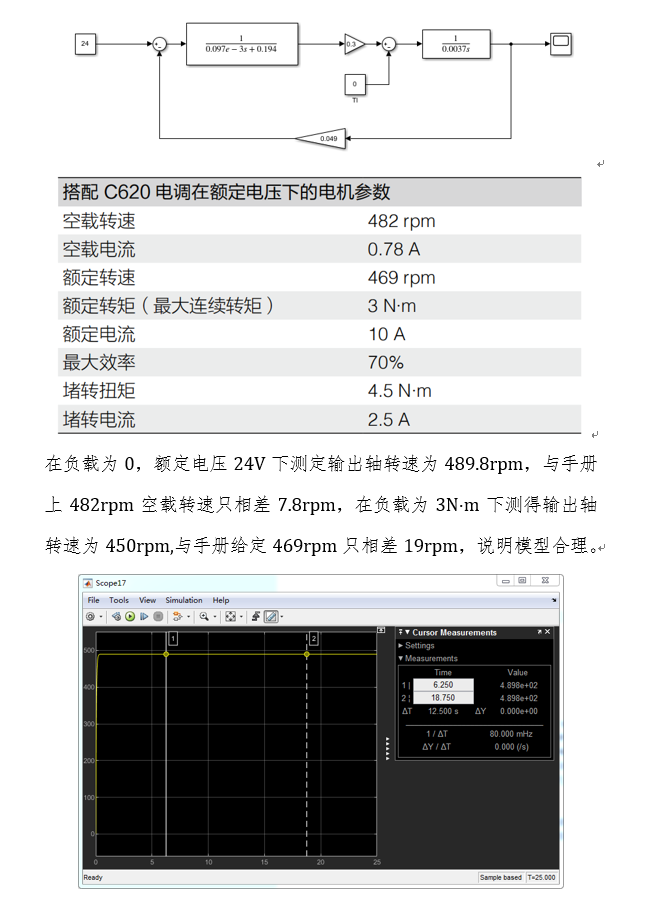
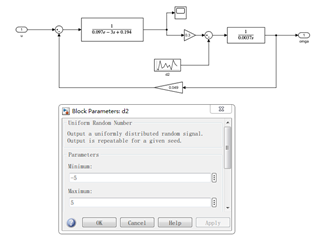
1:舵机系统框图
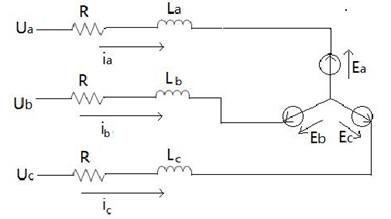
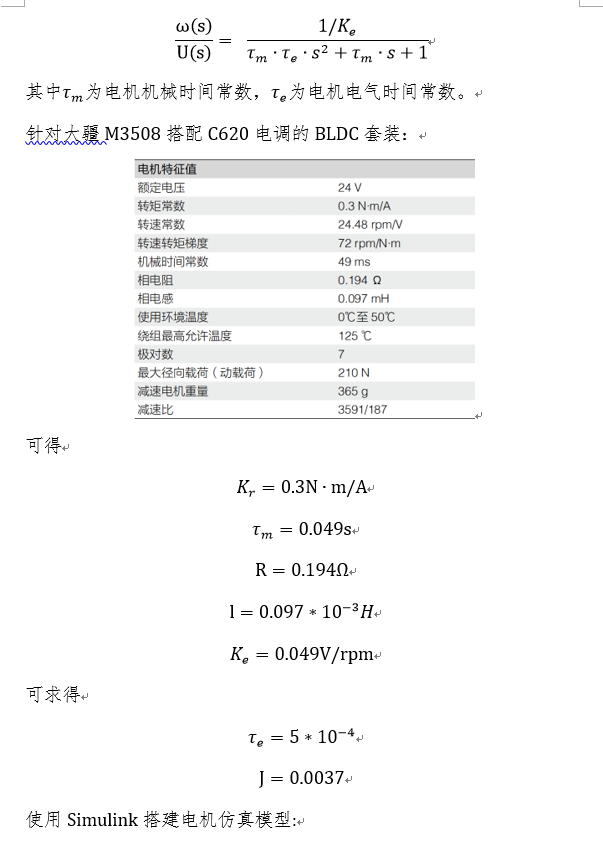
2:大疆M3508直流无刷电机数学模型建立
直流无刷电机电枢回路等效模型:

3:PWM驱动器数学模型
4:减速器数学模型
通过分析设计的减速器,减速比Ki=20.6335
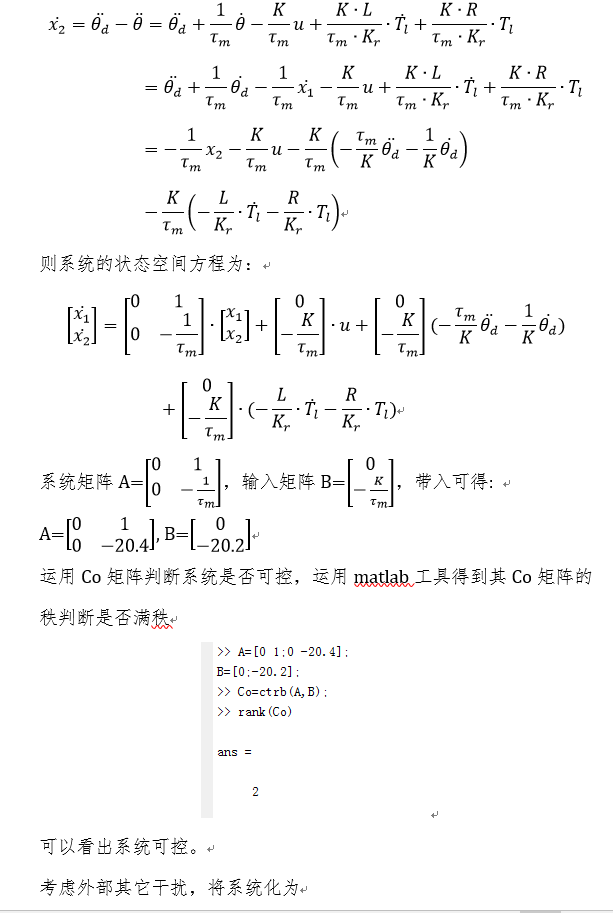
5:系统状态空间方程
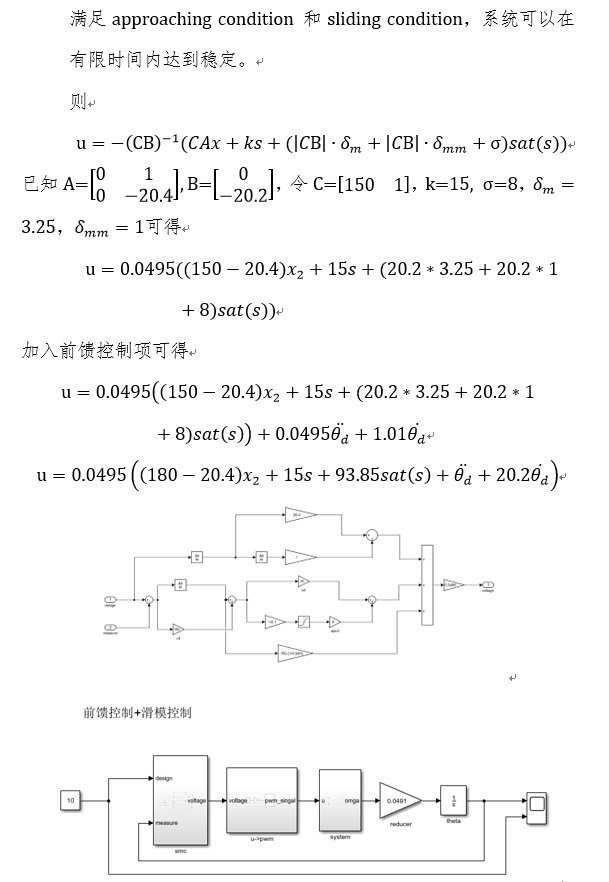
 6:前馈和滑模控制器设计
6:前馈和滑模控制器设计


 五:仿真验证
五:仿真验证
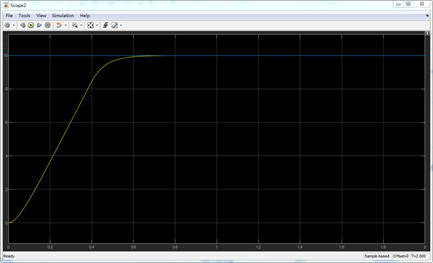
在单位阶跃信号的作用下系统输出为:
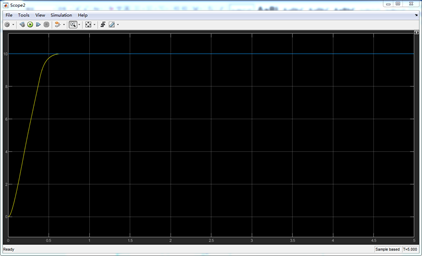
在正弦信号的作用下系统输出为:

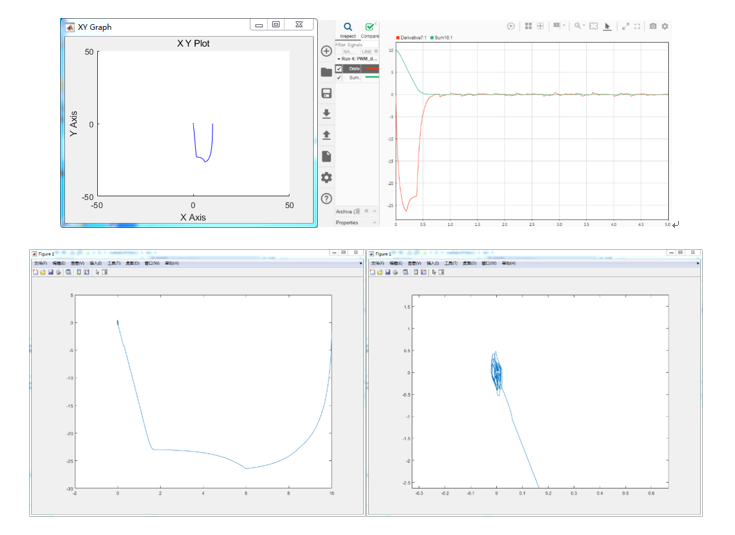
对系统施加正负5 N·m的干扰转矩,观察系统表现:

可以看出系统的调节时间,超调量,误差都在许可的范围内,控制器性能良好。
系统的滑膜特性:
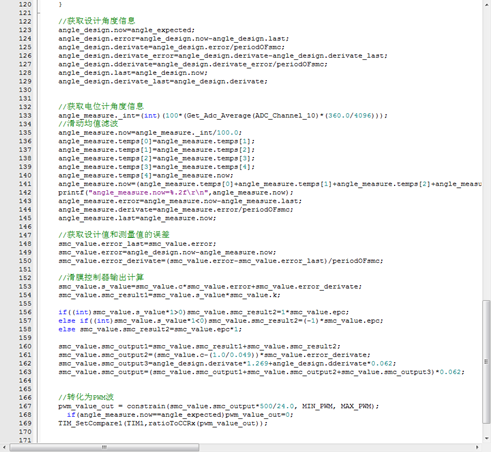
七:代码实现
滑膜控制器计算与输出
参考:《电动舵机变结构控制律研究_周满》
《高动态电动舵机的研究_赖明峰》
《基于前馈和滑模复合结构的飞行器电动舵机控制_林家泉》
《无人机电动舵机系统设计与控制技术研究_聂磊》
最后
以上就是文艺小熊猫最近收集整理的关于利用滑膜控制器实现舵机的角度控制与代码实现的全部内容,更多相关利用滑膜控制器实现舵机内容请搜索靠谱客的其他文章。
本图文内容来源于网友提供,作为学习参考使用,或来自网络收集整理,版权属于原作者所有。








发表评论 取消回复