我是靠谱客的博主 甜美煎蛋,这篇文章主要介绍【运动控制】滑模变结构控制1.算法思想2.算法原理3.算法调参4.个人理解5.实现6.视频分享7.相关论文,现在分享给大家,希望可以做个参考。
1.算法思想
…
2.算法原理
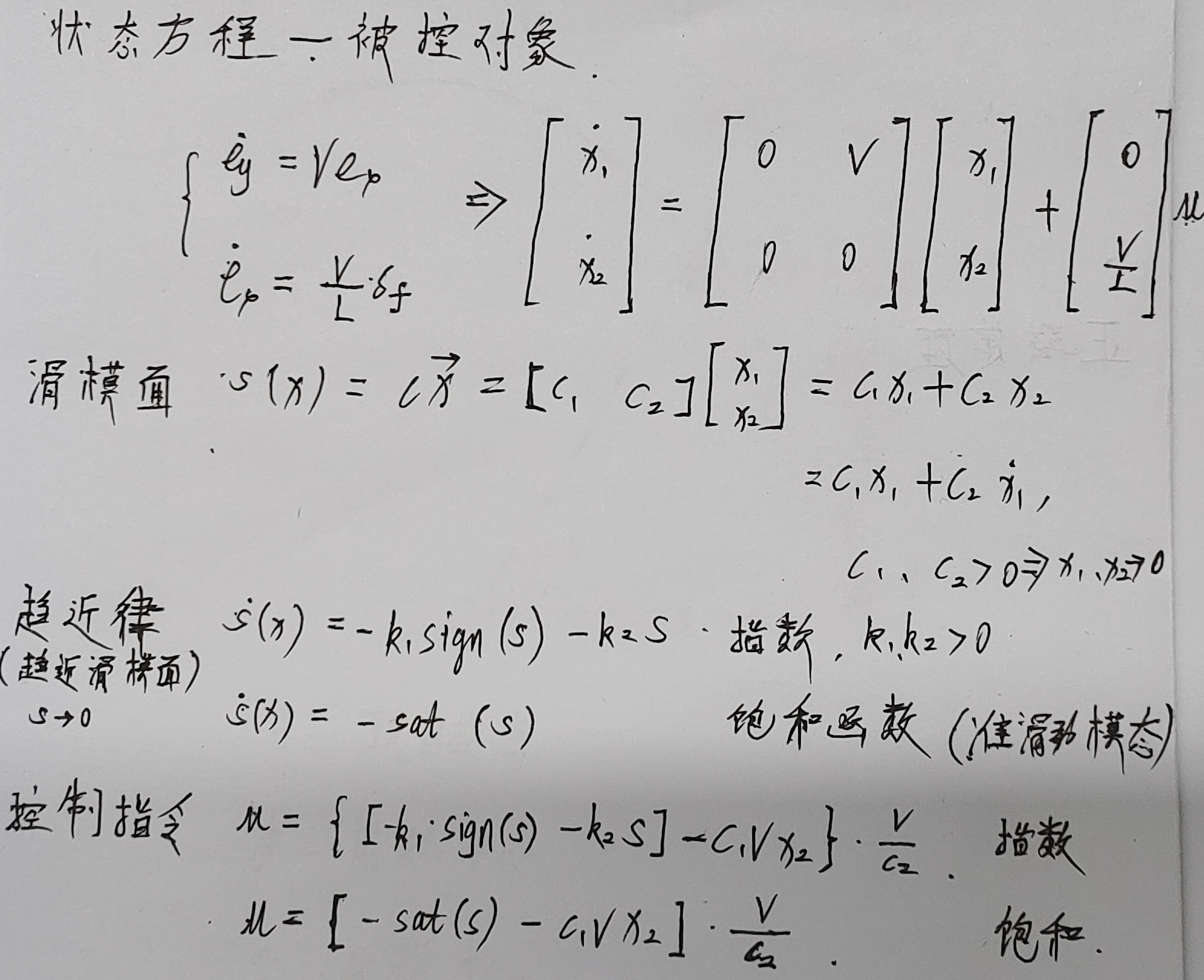
3.算法调参
1.指数趋近律控制器:符号函数项取小值,比例项取大值;
2.饱和函数趋近律控制器:饱和区间取窄,限幅值取小。
4.个人理解
1.滑模变结构控制可实现多个状态量的控制,实现横纵向协同控制;
2.理论指导调参方向,算法鲁棒性极强;
3.饱和函数趋近律引入了边界层,在边界层外切换控制,边界层内线性化反馈控制,牺牲控制精度来削弱抖震;
4.滑模面设计准则:使得状态轨迹在滑模面上运动时能够快速向平衡点移动;
5.趋近律设计准则:使得状态轨迹能够快速到达滑模面;
6.算法设计关键点:状态方程的建立、滑模面的设计、趋近律的选取;
7.稳定性分析:李雅普诺夫函数????????<0。
5.实现
...
6.视频分享
…
7.相关论文
…
最后
以上就是甜美煎蛋最近收集整理的关于【运动控制】滑模变结构控制1.算法思想2.算法原理3.算法调参4.个人理解5.实现6.视频分享7.相关论文的全部内容,更多相关【运动控制】滑模变结构控制1内容请搜索靠谱客的其他文章。
本图文内容来源于网友提供,作为学习参考使用,或来自网络收集整理,版权属于原作者所有。








发表评论 取消回复