滑模控制器的理论设计与仿真实现
滑模控制器的设计与仿真实现,可以具体参考我之前写的博客文章如下:
滑模变结构控制SMC(一)——滑模变结构控制的设计步骤
滑模变结构控制SMC(二)———滑模转速控制器的设计
滑模控制的转速控制器
为了进一步将滑模控制器应用到双闭环矢量控制中去,为此搭建如下仿真模型并进行仿真分析。并且对比小论文的改进效果,在此将仿真结果图2-4,分析仿真结果产生变化的原因。假定电流环均都是PI控制器,人为已经是整定至最佳的状态,从而来考量改进的效果与创新点。
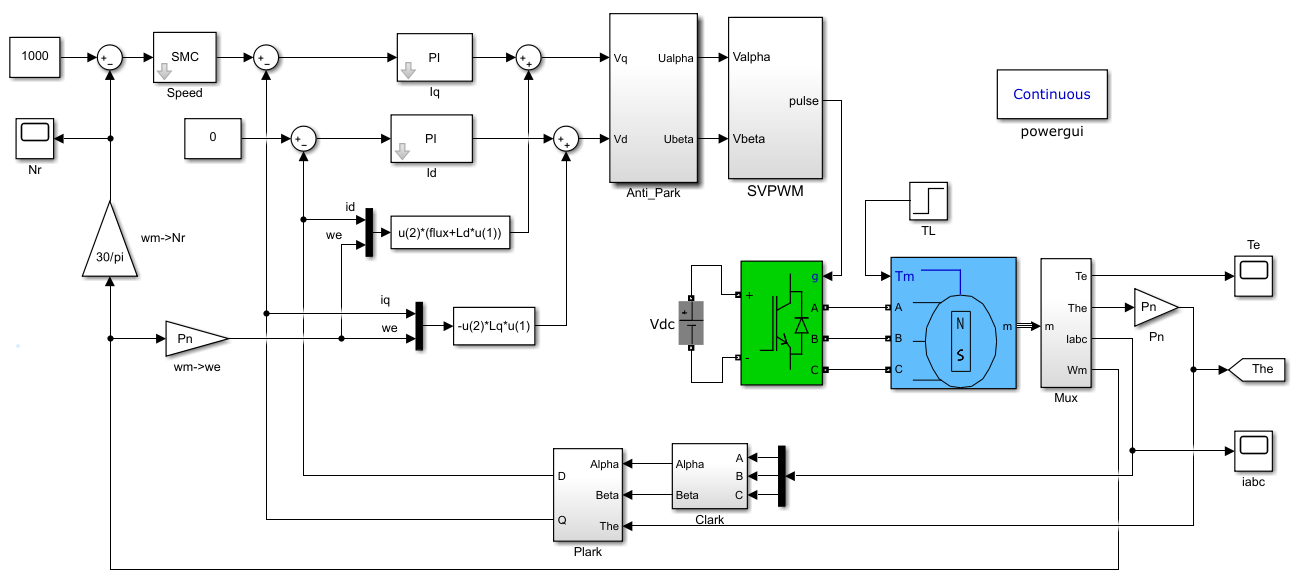
图1 转速环为滑模控制的矢量控制仿真图
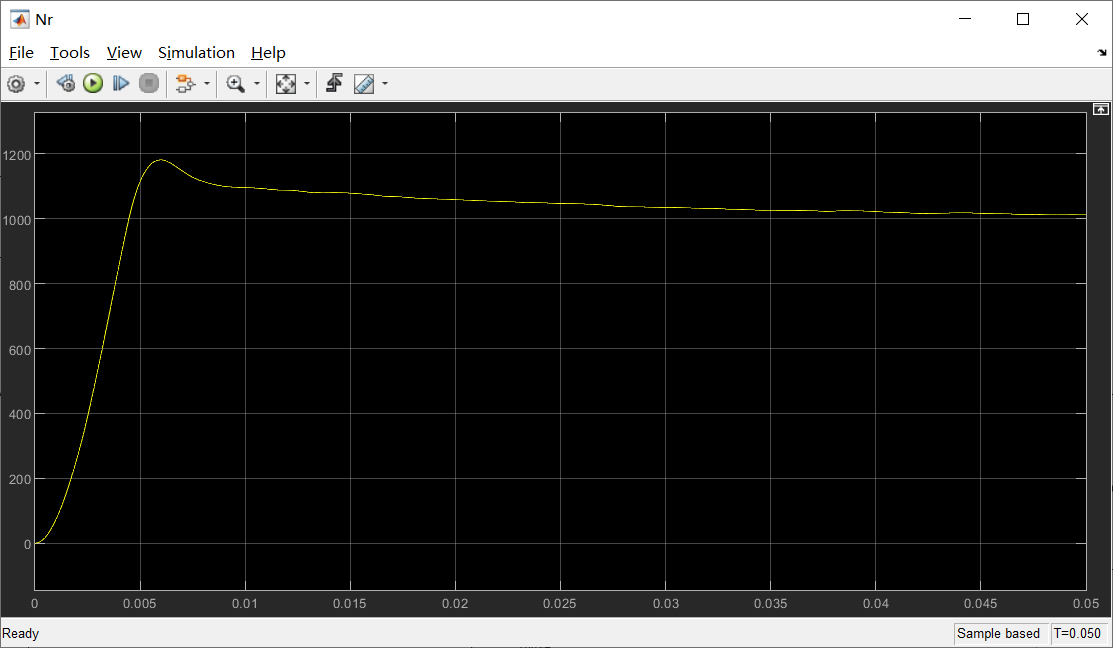
图2 转速仿真输出波形
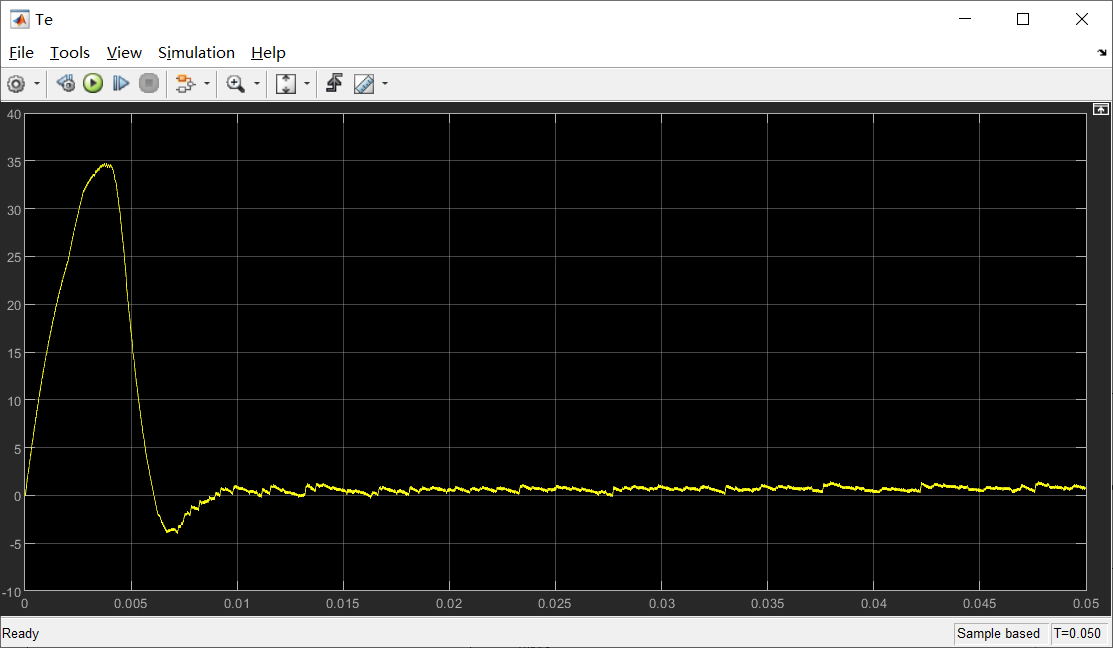
图3 转矩仿真输出波形
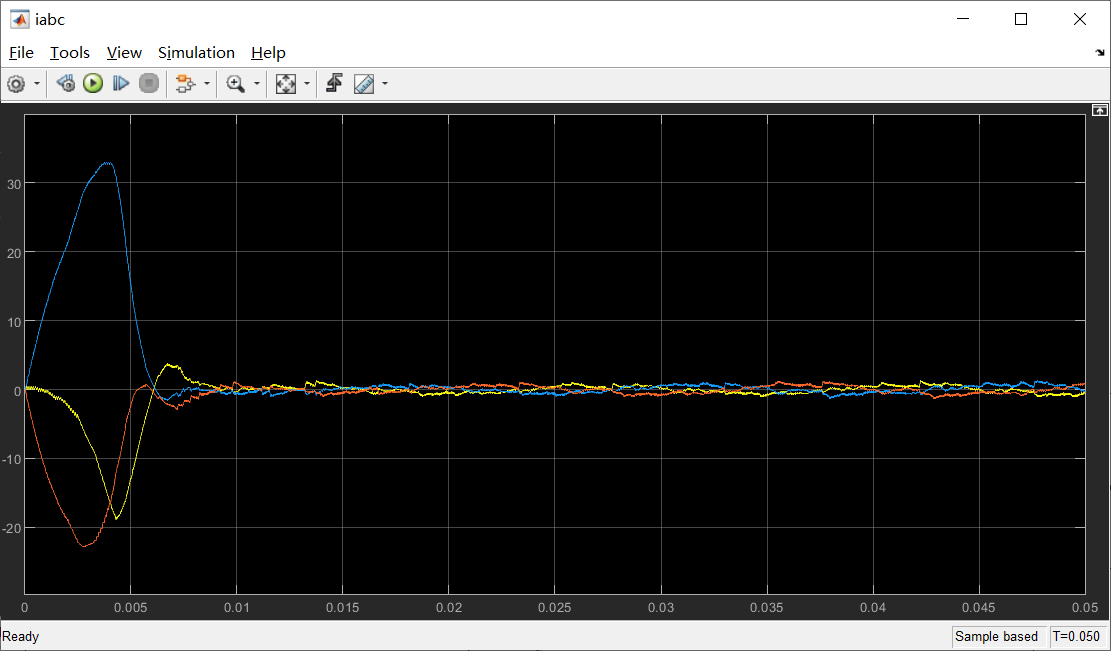
图4 相电流仿真输出波形
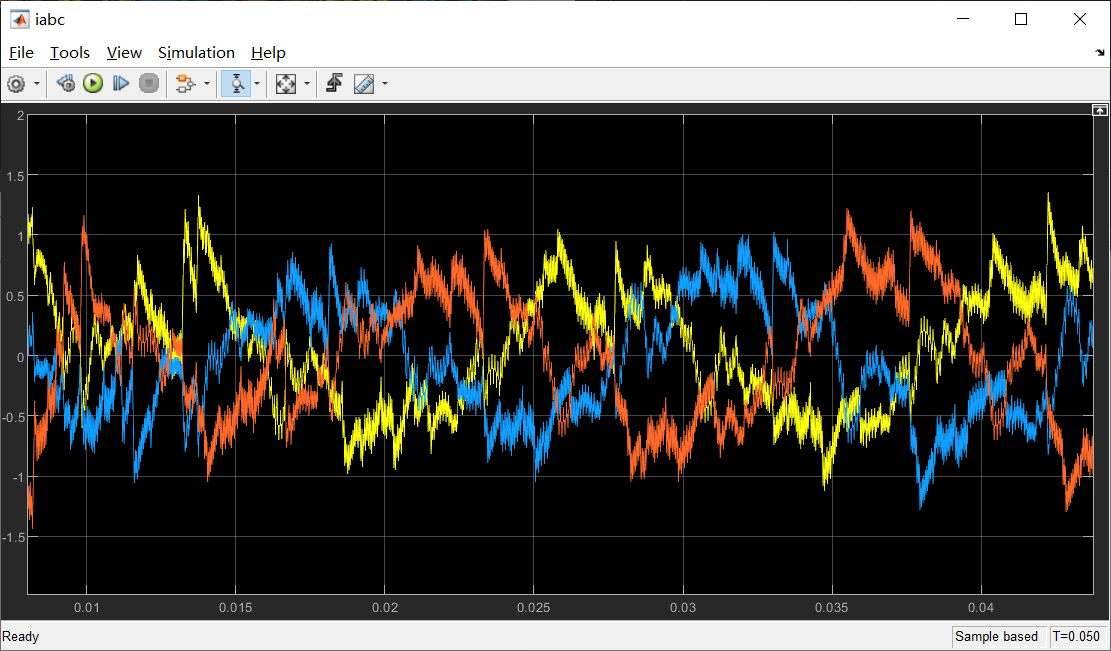
图5 相电流仿真局部放大图形
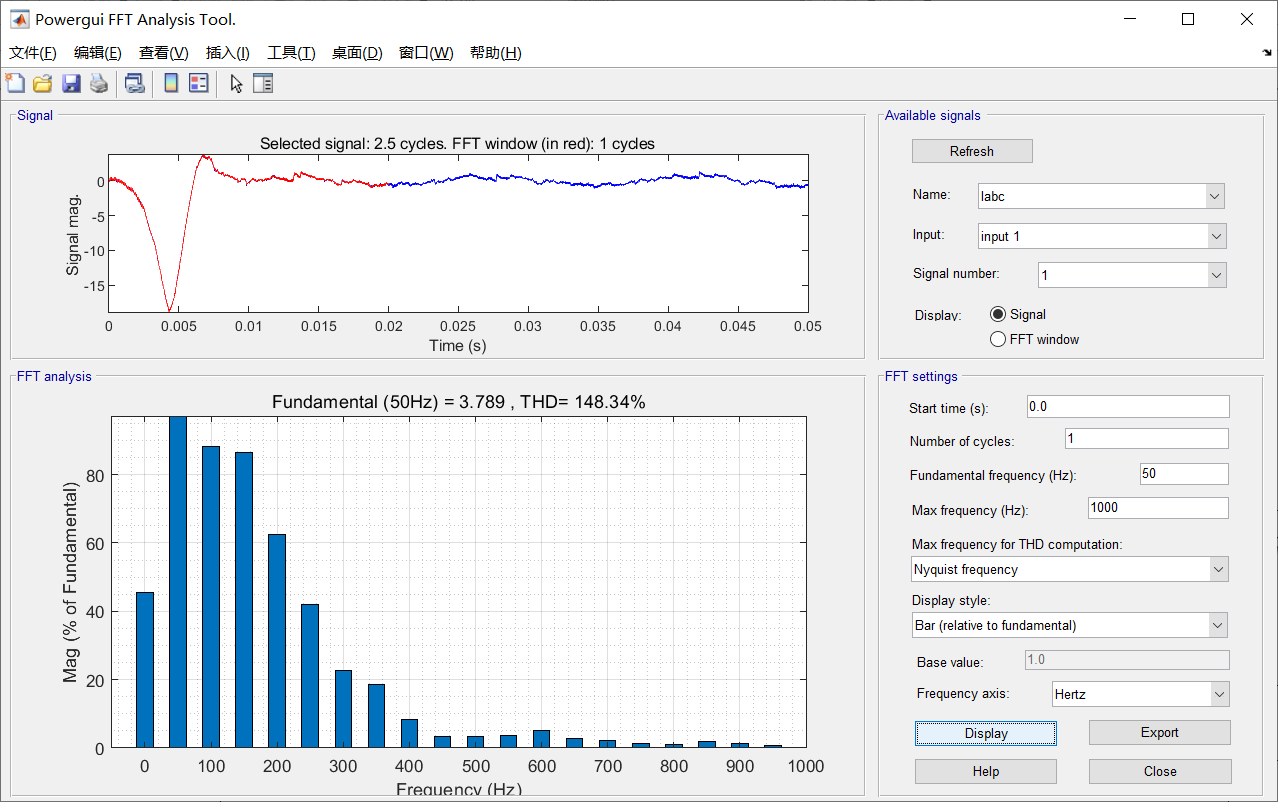
图6 相电流THD分析图
总结
由图2可看出,该控制系统的转速超调严重,且转速的波动较大;响应速度慢,且跟踪特性不太好;转矩脉动较大,主要是由于三相电流的正弦度不够,以及启动时峰值转矩过大等等恶化性能,这也可以由图6可看出。相电流的THD较大,肯定是无法适用于实际生产实际的。
最后
以上就是整齐黄蜂最近收集整理的关于滑模控制器的理论设计与仿真实现滑模控制器的理论设计与仿真实现的全部内容,更多相关滑模控制器内容请搜索靠谱客的其他文章。
本图文内容来源于网友提供,作为学习参考使用,或来自网络收集整理,版权属于原作者所有。








发表评论 取消回复