(注:主要是针对阻尼比为1,没有超调的系统)
二阶惯性环节如下图1所示
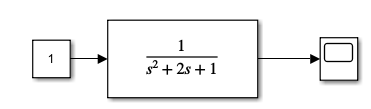
图1
阶跃响应如下图2
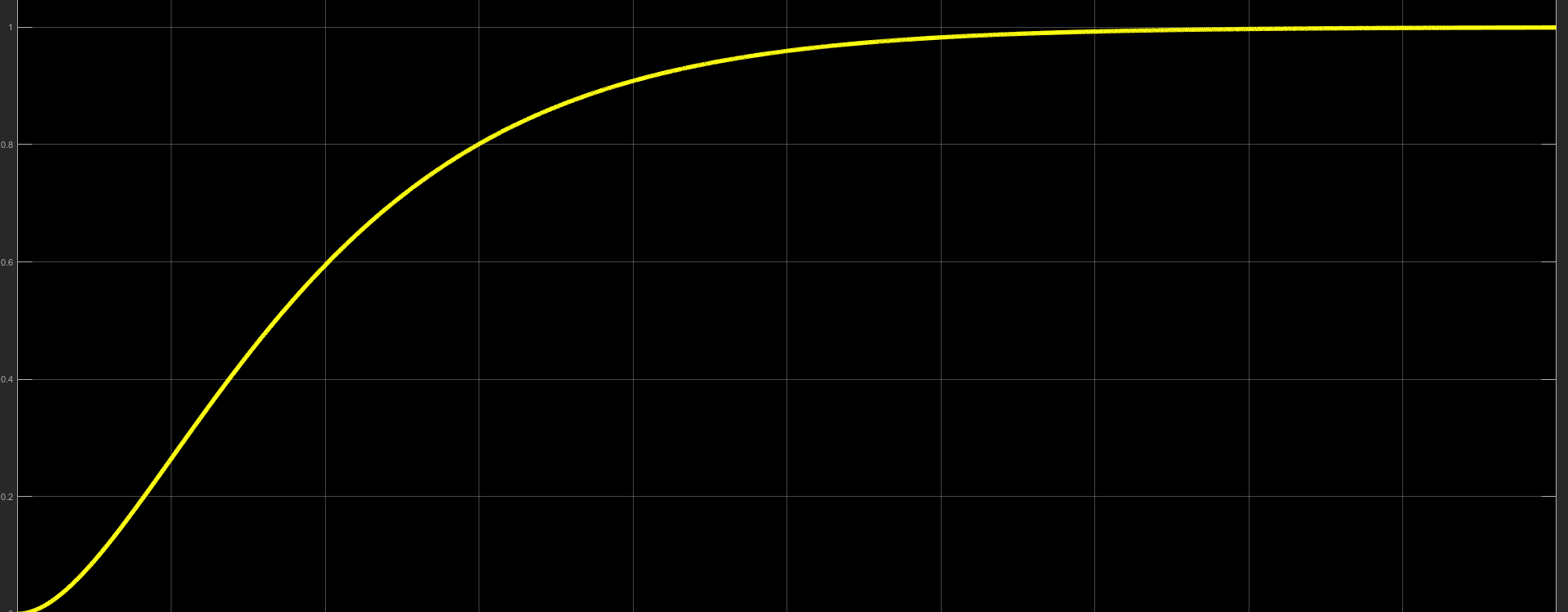
图2
由仿真图可知,该系统响应速度缓慢,且系统阻尼比为1,因此也没有超调现象。
本文针对二阶惯性系统的跟踪性能进行改进,
按照本人早期文章《一阶惯性传感器的快速跟踪性能实现》中对一阶系统的改进措施,首先在该二阶系统后建立反馈如图3
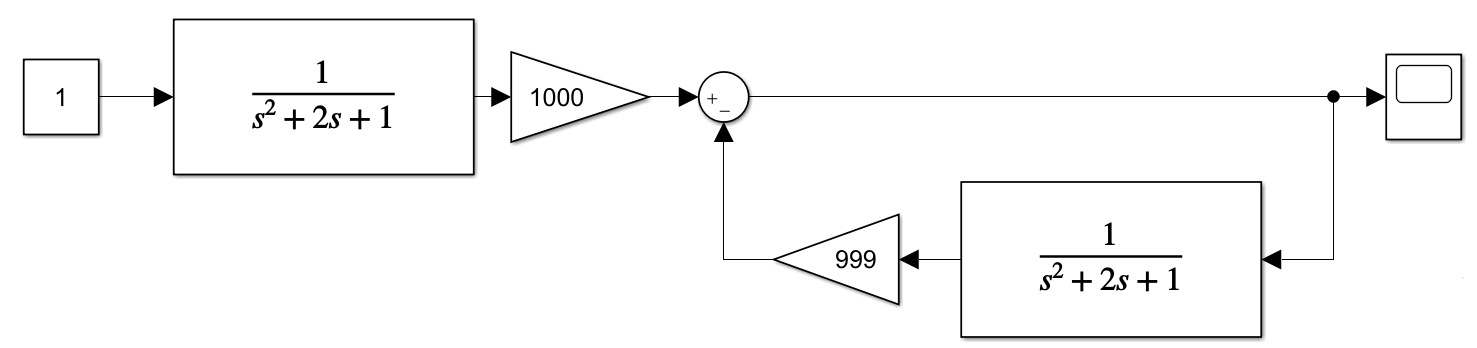
图3
该系统只改变了系统的常数项,但一次项系数未发生改变,由控制理论可知,二阶惯性系统传递函数为
其中
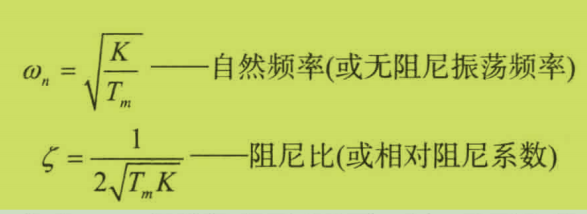
因此,当系统的常数项改变,而一次项系数未发生改变时,自然频率增大,而阻尼比减小。当阻尼比小于1时,系统产生超调,且震荡随着自然频率的增加而增多。
图3系统仿真结果如图4
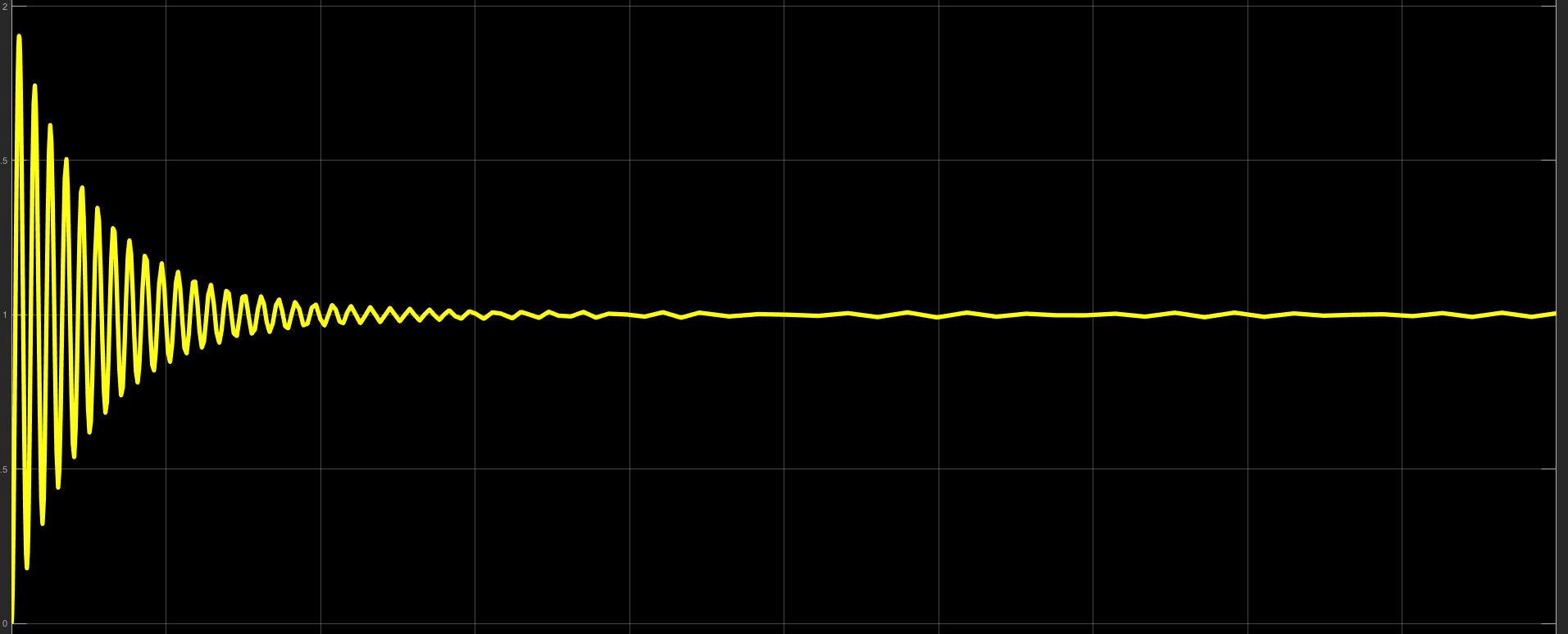
图4
由图4可见,系统的动态性能恶劣,其主要原因是阻尼比的降低。
为此,本文采用增加微分模块的方法,如图5,首先在传递函数后面增加一个微分环节,使得二阶惯性环节变为一阶惯性环节,
接着按照本人早期文章《一阶惯性传感器的快速跟踪性能实现》中对一阶系统的改进进行处理。
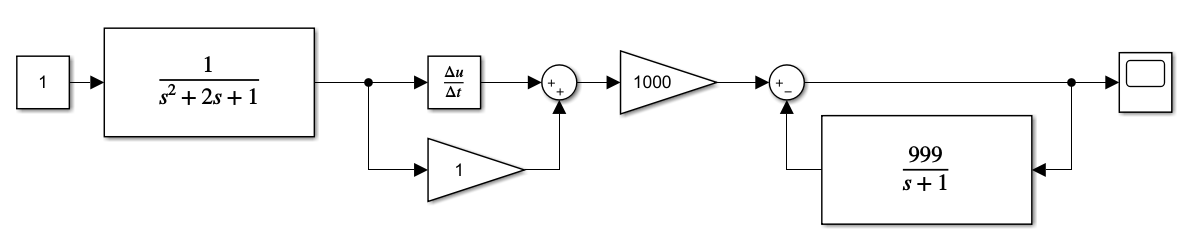
图5
其仿真结果如图6

图6
由图可知,系统动态性能有了很大改善,但由于参数设置的问题,系统波形出现了很多冲击波。这主要是由于采样频率、二阶系统性能等因素的影响。
因此,调整跟踪系统的比例参数后的模型如图7
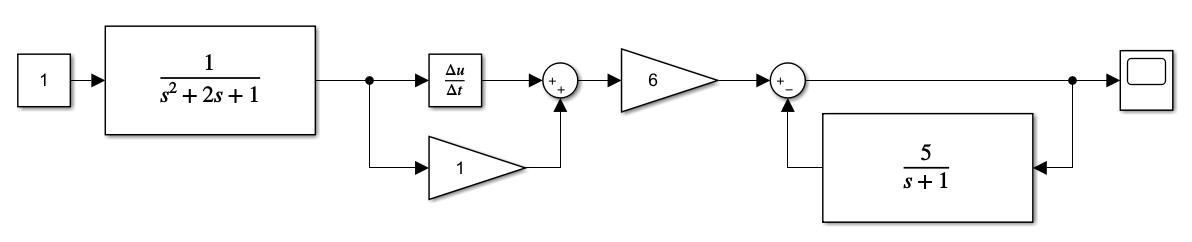
图7
仿真结果如图8
图8
可见,该系统可以实现良好的信号跟踪功能,可实现0超调、可实现较低纹波的稳态输出。
最后
以上就是老迟到唇彩最近收集整理的关于二阶惯性环节的快速跟踪性能实现的全部内容,更多相关二阶惯性环节内容请搜索靠谱客的其他文章。
本图文内容来源于网友提供,作为学习参考使用,或来自网络收集整理,版权属于原作者所有。








发表评论 取消回复