PID控制器是工业过程控制中广泛采用的一种控制器,其中,P、I、D分别为比例(Proportion)、积分(Integral)、微分(Differential)的简写;将偏差的比例、积分和微分通过线性组合构成控制量,用该控制量对受控对象进行控制,称为PID算法 。
其传递关系为:
控制器的传递函数可写为:
差分方程为:![]()
其中KP、KI、KD分别为比例系数、积分系数、微分系数。
比例系数KP :反应系统当前最基本的误差,系数大,可以加快调节,减小误差,但是过大的比例使系统稳定性下降,甚至造成系统的不稳定。
积分系数KI :反应系统的累计误差,使系统消除稳态误差,提高无差度,只要有误差,积分调节就会起作用。
微分系数KD :反应系统误差的变化率,具有预见性,们可以预见偏差的变化趋势,产生超前的控制效果。因此可以改善系统的动态性能。但是微分对噪声有放大作用,会减弱系统的抗干扰性。
(一)PID控制器参数整定的方法有很多,概括起来主要有两大类:一是理论计算整定法,二是通过在线实验的工程整定法。
- 理论计算整定法
它主要是依据被控对象准确的数学模型,经过理论计算确定控制器参数。这种方法一般较难做到,同时,得到的计算数据未必可以直接使用,还必须通过工程实际进行调整和修改。
2.工程整定法
它不需要得到过程模型,主要依赖工程经验,在控制系统的试验中直接进行参数整定。方法简单实用,计算简便且易于掌握,可以解决一般的实际问题,在工程实际中被广泛采用。PID控制器参数的工程整定法,主要有临界比例度法(又称稳定边界法)、反应曲线法和4:1衰减法。其共同点都是通过实验,然后按照工程经验公式对控制器参数进行整定。然而,无论采用哪一种方法整定所得到的控制参数,都需要在实际运行中进行最后的调整与完善。
2.1试凑法就是通过仿真或实际运行,观察系统对典型输入作用的响应曲线,根据各控制参数对系统的影响,反复调节试凑,直到满意为止,从而确定PID参数。
参数整定找最佳,从小到大顺序查,
先是比例后积分,最后再把微分加,
曲线振荡很频繁,比例度盘要放大,
曲线漂浮绕大湾,比例度盘往小扳,
曲线偏离回复慢,积分时间往下降,
曲线波动周期长,积分时间再加长,
曲线振荡频率快,先把微分降下来,
动差大来波动慢,微分时间应加长,
理想曲线两个波,前高后低四比一,
一看二调多分析,调节质量不会低
2.2 Ziegler-Nichols方法 已经发展成为一种在参数设定中,处于经验和计算法之间的中间方法。这种方法可以为控制器确定非常精确的参数,在此之后也可进行微调。
Ziegler-Nichols基于时域响应曲线的整定
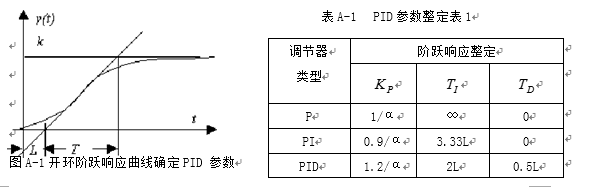
1反应曲线法:用阶跃响应曲线来整定控制器的参数。
设想对被控对象(开环系统)施加一个阶跃信号,通过实验方法,测出其响应信号,根据这条阶跃响应曲线定出一些能反映控制对象动态特性的参数。如图所示,以曲线的拐点作一条切线得到三个参数:K是控制对象的增益,L是等效滞后时间,T是等效滞后时间常数。则输出信号可由图中的形状近似确定参数K,L和T(或α) ,其中![]() 。如果获得了参数K,L和T(或α) 后,则可根据表A-1确定PID控制器的有关参数。
。如果获得了参数K,L和T(或α) 后,则可根据表A-1确定PID控制器的有关参数。
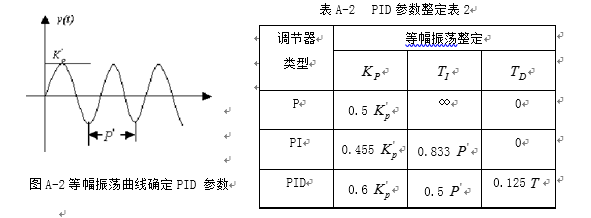
2稳定边界法:用系统的等幅振荡曲线来整定控制器的参数。
先测出系统处于闭环状态下的对象的等幅振荡曲线,根据等幅振荡曲线定出一些能反映控制对象动态特性的参数。设系统为只有比例控制的闭环系统,则当KP增大时,闭环系统若能产生等幅振荡,如测出其振幅kp'和振荡周期p',然后由表A-2整定PID参数。
上述二法亦适用于系统模型已知的系统。但是此二法在应用中也有约束,因为许多系统并不与上述系统匹配,例如第一法无法应于开环传递中含积分项的系统,第二法就无法直接应用于二阶系统。如 就无法利用Ziegler-Nichols法进行整定。
就无法利用Ziegler-Nichols法进行整定。
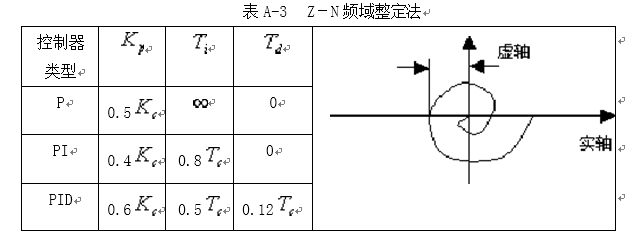
Ziegler-Nichols基于频域法的整定
如果实验数据是由频率响应得到的,则可先画出其对应的Nyquist图,从图中可以容易得到系统的剪切频率 ![]() 与系统的极限增益
与系统的极限增益 ![]() ,若令
,若令 ![]() ,同样我们从表3-3给出的经验公式可以得到PID控制器对应的参数。事实上,此法即时域法的第二法。
,同样我们从表3-3给出的经验公式可以得到PID控制器对应的参数。事实上,此法即时域法的第二法。
(二)选用Ziegler-Nichols基于时域响应曲线的整定反应曲线法
已知受控对象为传递函数 ![]()
传递函数在阶跃信号激励下测出其响应信号,根据这条阶跃响应曲线定出一些能反映控制对象动态特性的参数。如图 4所示,以曲线的拐点作一条切线得到三个参数
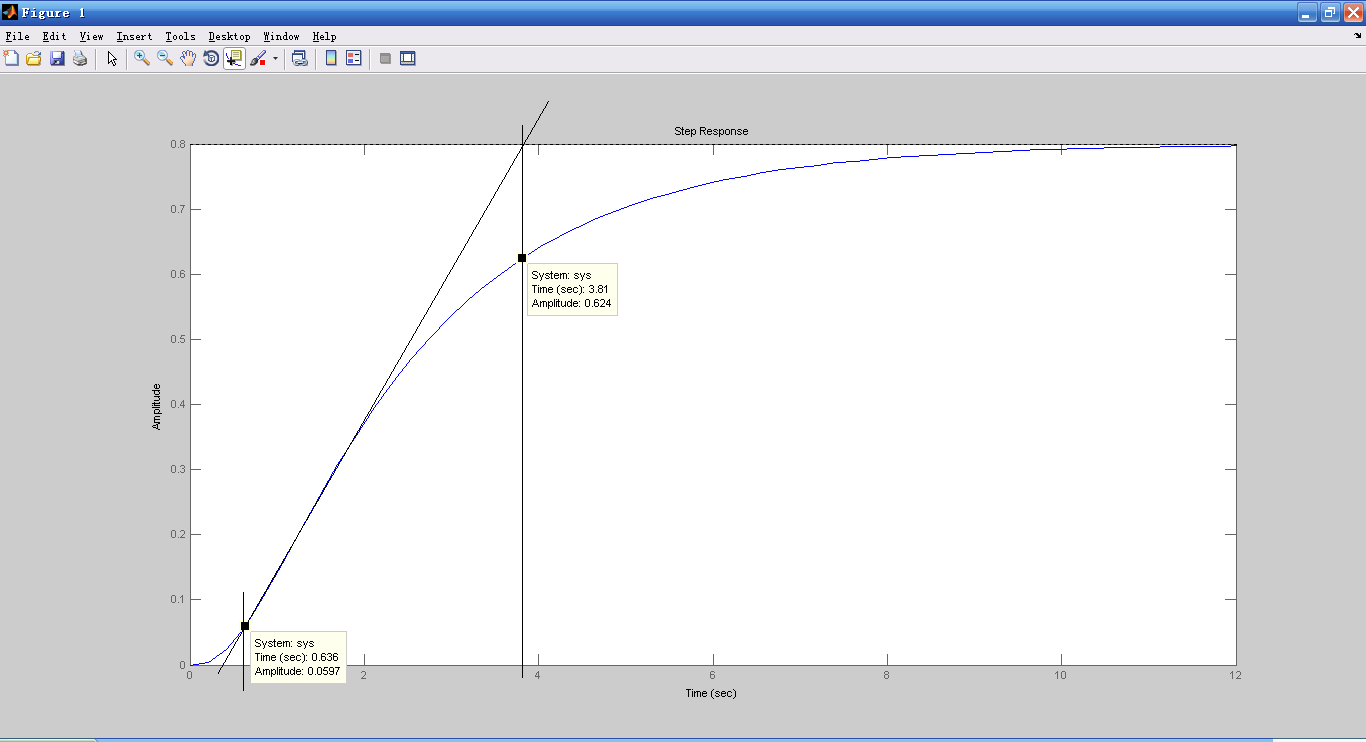
图 4开环阶跃响应曲线确定PID 参数
由图可知,取L=0.6 T=3.186 k =0.8000。于读图存在误差,因此参数仍需整定。已知对象的K、L 和T 值后,根据Ziegler — Nichols整定公式编写一个MATLAB函数
clc;clear
s=tf('s');clc;clear;
num=[8];
den=conv([1 5],conv([1 2],[2 1]));
G=tf(num,den)
step(G,15);;hold on
k=dcgain(num,den)
L=0.6; T=3.186 ;K =0.8;
a=K*L/T
PIDKp=1.2*T/(K*L);
PIDTi=2*L;
PIDTd=0.5*L;
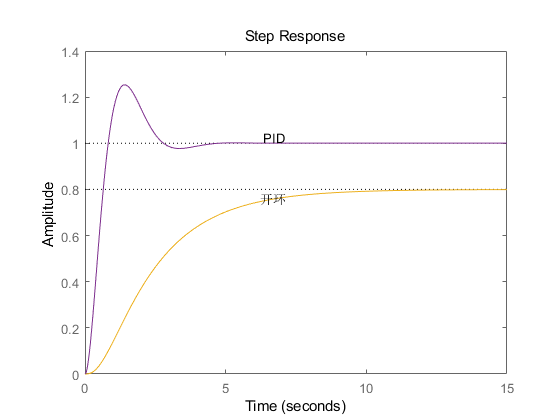
PIDG=PIDKp*(1+1/(PIDTi*s)+PIDTd*s)
step(feedback(PIDG*G,1)),hold on
最后
以上就是含蓄小丸子最近收集整理的关于PID参数 Ziegler-Nichols基于时域响应曲线的整定 反应曲线法的全部内容,更多相关PID参数内容请搜索靠谱客的其他文章。








发表评论 取消回复