
点击箭头处蓝色字 “iFTrue未来已来”关注我哦~
核心概览
——《电力电子基础 Power Electrics》系列(之)控制器设计 1 概述 2 负反馈对网络传递函数的影响2.1 反馈环节的特点:减小“扰动-输出”传递函数
2.2 反馈环节的特点:降低“给定-输出”传递函数对前向通道增益变化的敏感性 3 重要参量1/(1+T)与T/(1+T)的释义 4 稳定性 4.1 相角裕度测试
4.2 相位裕度与闭环阻尼系数的关系 5 调节器设计
5.1 超前校正器(PD)
5.2 滞后校正器(PI)
5.3 超前-滞后(PID)校正器
5.4 设计举例 6 开环增益的测量
6.1 电压注入法
6.2 电流注入法
6.3 不稳定系统的测量 7 关键点总结
5 调节器设计(下) 设计举例
▼
为了说明PI和PD校正器的设计,我们考虑对图1所示的dc-dc buck转换器系统采用PID校正器进行设计。该系统的输入电压vg(t)的标称值为28V,期望的输出电压为15V,负载电流为5A,负载电阻为3Ω,5V参考电压是准确的。
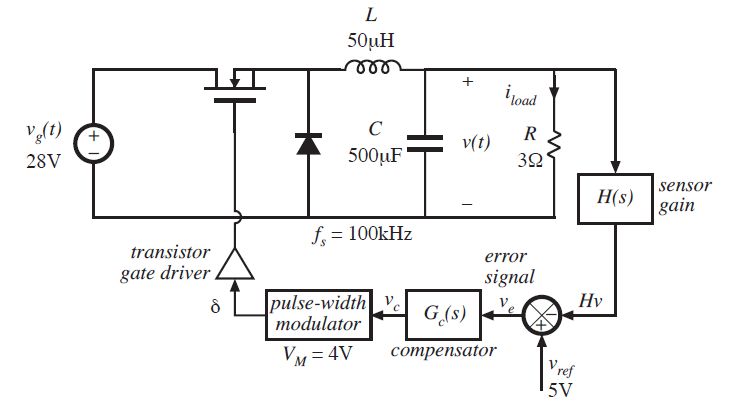
图1 设计示例:buck电路
静态特征
第一步是选择反馈增益H(s)。让我们假设我们将成功设计一个好的反馈系统,使输出电压精确地跟随参考电压。这是通过一个大的开环增益T来实现的,最终使得误差电压接近0。因此,采样电压Hv ≈ vref,我们应该选择

静态占空比可以由变换器稳态解得到:
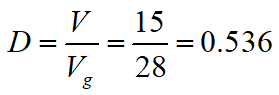
静态控制电压为

其中VM为载波幅值。
至此,系统的静态条件全部已知,仅剩校正器的设计。小信号模型
系统的小信号交流模型如图2所示。buck变换器交流模型以规范形表示,同时对输入电压和负载电流的扰动进行了建模。通常地,模型框图中包含参考电压小信号变化量

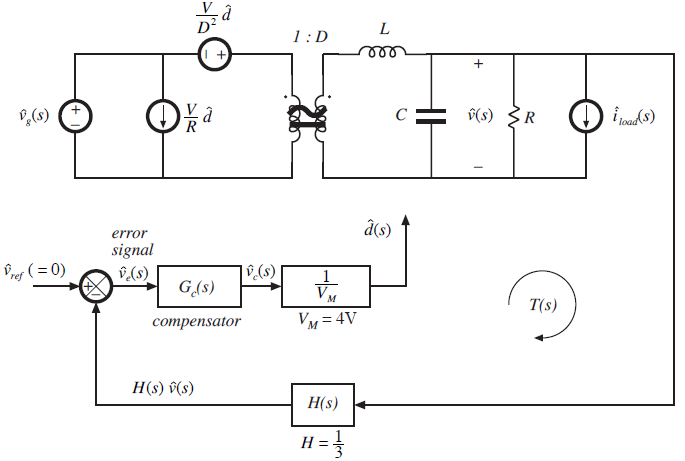
图2 buck电路系统小信号模型
> 开环“控制-输出”功率级传函Gvd(s)
开环传递函数为
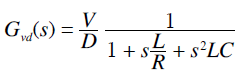
开环传递函数包含两个极点,写成标准形为
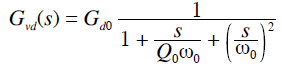
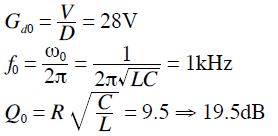
由以上两式可以得到直流增益(零频幅比)、转折频率和谐振峰值Q因数:
buck电路功率级传函对数幅频/相频特性曲线:
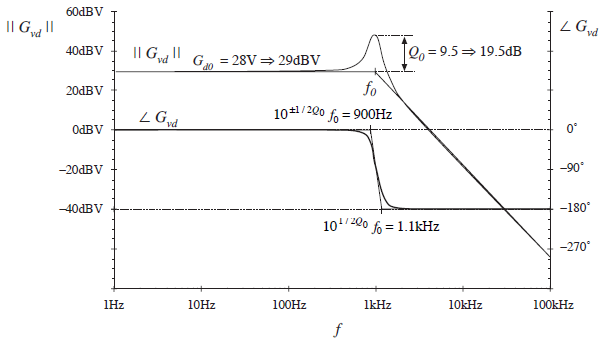
图3 buck电路功率级传函对数幅频/相频特性曲线
> 开环“线路-输出”传函与输出阻抗
“线路-输出”传函:
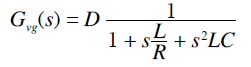
与“控制-输出”传函有相同的极点。
输出阻抗:

> 带有校正器的系统框图
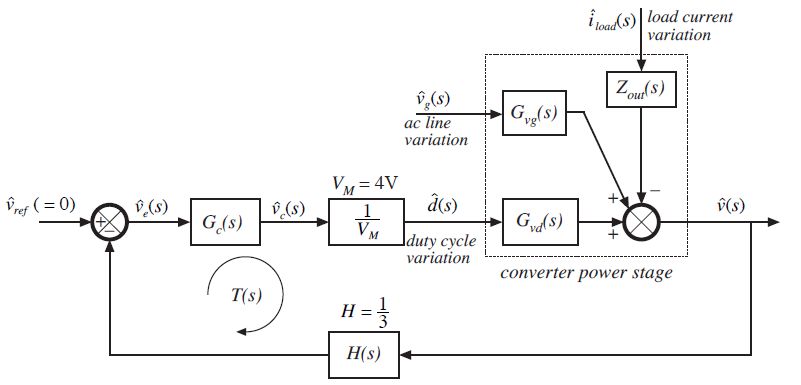
图4 加入校正器后的系统框图
带有校正器的系统开环传递函数: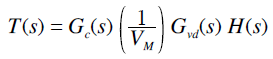
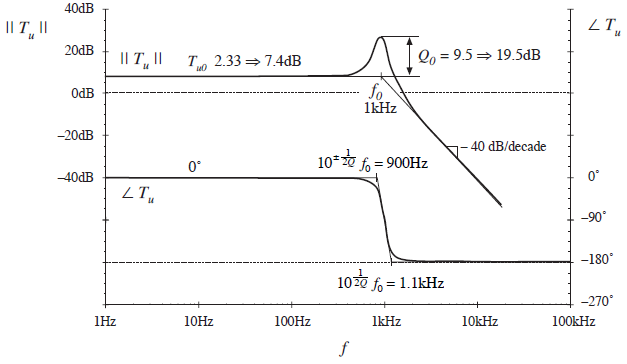
> 未进行校正的系统开环增益(即Gc=1)
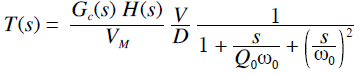
当Gc = 1时,开环增益为
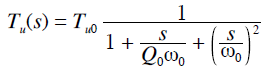
其中,
截至频率与相角裕度为

校正器设计
> 超前校正器设计
期望截至频率:5kHz(或开关频率的1/20)
因为Tu(s)在5kHz时相角接近-180°,因而采用超前(PD)校正器增加相角裕度
超前(PD)校正器在5kHz时的相角裕度应该设计为+52°
由图5可知,未校正的环路增益在5kHz时约为Tu0 · ( f0 / fc )^2 = 0.0093 = -20.6dB
所以,超前(PD)校正器在5kHz时的增益应为+20.6dB
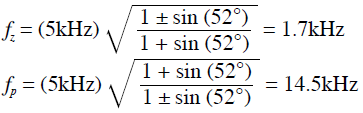
超前(PD)校正器的零极点频率应为
为了使校正器的的在5kHz时的增益应为+20.6dB,直流(dc)增益应为

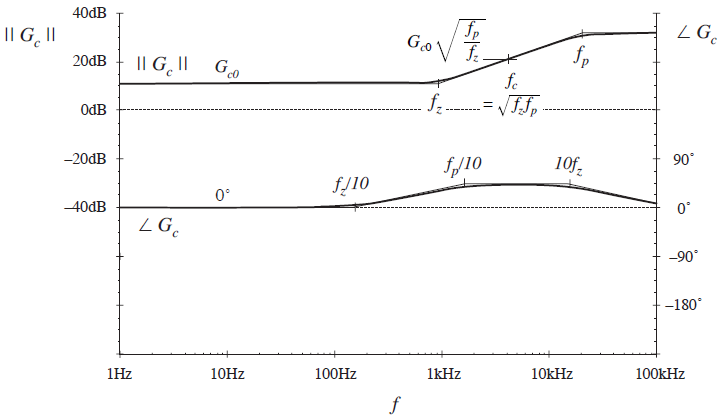
图6 设计示例的PD校正器传函Gc波特图
> 带有超前校正的系统开环增益
采用PD超前校正器时的系统开环增益为
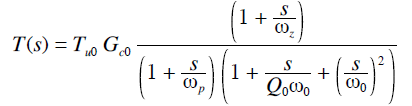
对应的波特图如图7所示。可以看出开环增益的相角裕度在频率1.4kHz~17kHz范围内均接近52°,因而由于电路参数引起的截止频率在5kHz附件偏移的将不会对相角裕度产生明显的影响。另外,由图7可以看出,开环增益的直流频段增益T0 = Tu0Gc0 = 18.7dB。
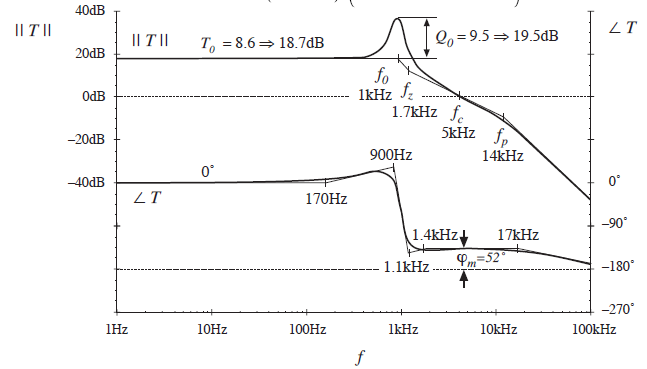
图7 PD超前校正后的系统开环增益波特图
参量1 / ( 1 + T )的渐近线如图8所示。这个参量的直流频段增益约为-18.7dB。因此,在频率小于1kHz时,反馈回路会将输出电压扰动量衰减18.7dB。
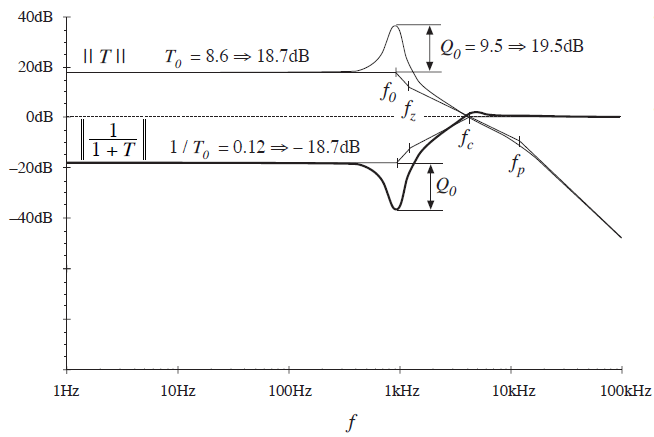
图8 PD校正后的示例系统的|| 1/(1 + T) ||参量释义
> 进步一改进的系统(带有PID校正器)
为了使得直流频段增益进一步提高,在PD校正器上增加一个反向零点,也就是所谓的PID校正器。其传函为
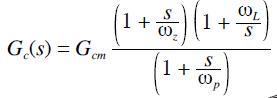
对应的波特图如图9所示,零点和极点频率没有改变,中频段增益Gcm与之前的Gc0相同。选择转折频率fL约为截至频率的1/10以不影响原来的相角裕度。反向零点的加入使得系统低频增益增加,提高了系统的低频调节能力。
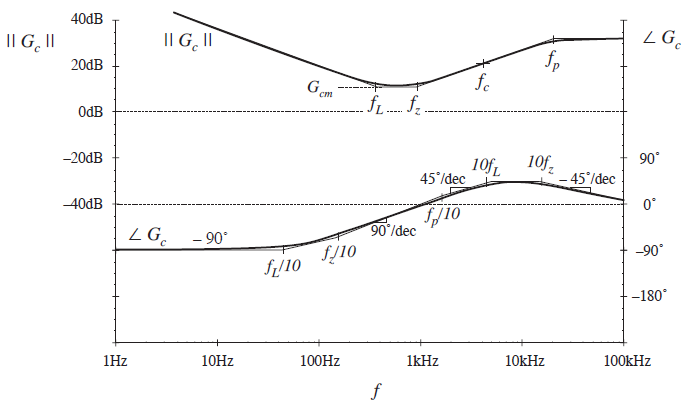
图9 PID校正器传函
> “线路-输出”传递函数
“线路-输出”传递函数如图10所示。开环与带有反馈环节的“线路-输出”传函波特图两者在频率大于截止频率时重合,在频率小于截止频率时,带有反馈环节的“线路-输出”传函减小了1/(1+T(s)),表明在低频段抑制干扰能力增强。
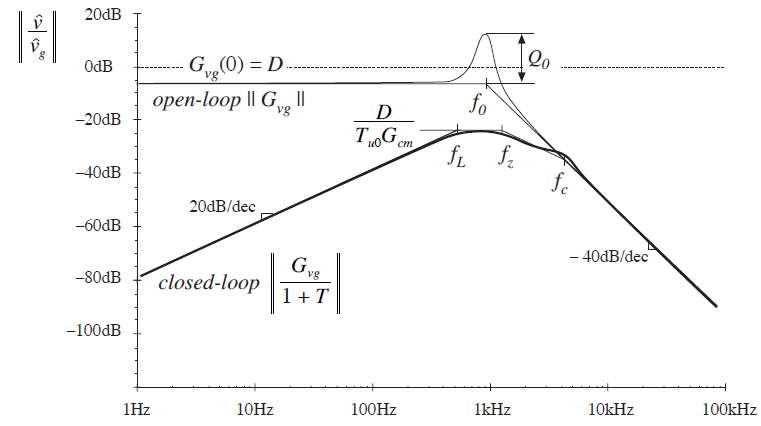
图10 开环与带有反馈环节的“线路-输出”传函对比
 加入技术交流群行业精英,快来加入
加入技术交流群行业精英,快来加入
欢迎加入交流群,本群供大家进行交流,电力电子、电力传动、DSP控制器、软件算法,只要你有问题都可以在这里交流。
因目前群人数超200人,仅能邀请加入,请添加以下微信,由我拉你入群,注明:加群 + 从事/研究方向,例如:加群 逆变器软件

「 加入交流群 」
最后
以上就是彩色荔枝最近收集整理的关于开环传递函数判断系统类型_控制系统校正器设计实例的全部内容,更多相关开环传递函数判断系统类型_控制系统校正器设计实例内容请搜索靠谱客的其他文章。








发表评论 取消回复