什么是 PID 控制器:工作原理及其应用
- 什么是PID控制器?
- 历史
- PID控制器框图
- PID控制器的工作
- P-控制器
- I-控制器
- D-控制器
- PID控制器的类型
- 开/关控制
- 比例控制
- 标准型PID控制器
- 实时 PID 控制器
- 调优方法
- 试错法
- 过程反应曲线技术
- Zeigler-Nichols 方法
- PID控制器结构
- 应用
- 炉温控制
- MPPT充电控制器
- 电力电子转换器
- PID 控制器接口
- 公式
PID 控制器广泛应用于工业过程控制。工业自动化领域大约 95% 的闭环操作使用 PID 控制器。PID 代表比例-积分-微分。这三个控制器以产生控制信号的方式组合。作为反馈控制器,它提供所需水平的控制输出。在微处理器发明之前,PID 控制是由模拟电子元件实现的。但是今天所有的 PID 控制器都由微处理器处理。可编程逻辑控制器也有内置的PID控制器指令。由于 PID 控制器的灵活性和可靠性,它们传统上用于过程控制应用。
什么是PID控制器?
术语PID代表比例积分微分,它是一种用于控制工业应用中压力、流量、温度和速度等不同过程变量的设备。在该控制器中,控制回路反馈装置用于调节所有过程变量。
这种类型的控制用于在目标位置的方向上驱动系统,否则水平。它几乎无处不在用于温度控制,并用于科学过程、自动化和无数化学品。在这个控制器中,闭环反馈用于保持来自接近目标的方法的实际输出,否则如果可能的话输出在固定点。在本文中,讨论了 PID 控制器设计及其使用的控制模式,如 P、I 和 D。
历史
PID 控制器的历史是从1911 年第一个 PID 控制器由 Elmer Sperry 开发。之后,TIC(Taylor Instrumental Company)在 1933 年实施了一个具有完全可调功能的前气动控制器。几年后,控制工程师通过将末端重新调整为某个假值直到误差不为零,从而消除了在比例控制器中发现的稳态误差。
这种重新调整包括称为比例积分控制器的误差。之后,在 1940 年,通过微分动作开发了第一个气动 PID 控制器,以减少超调问题。
1942 年,Ziegler & Nichols 引入了调谐规则,以发现和设置 PID 控制器的合适参数。1950年中期,自动PID控制器终于在工业中得到广泛应用。
PID控制器框图
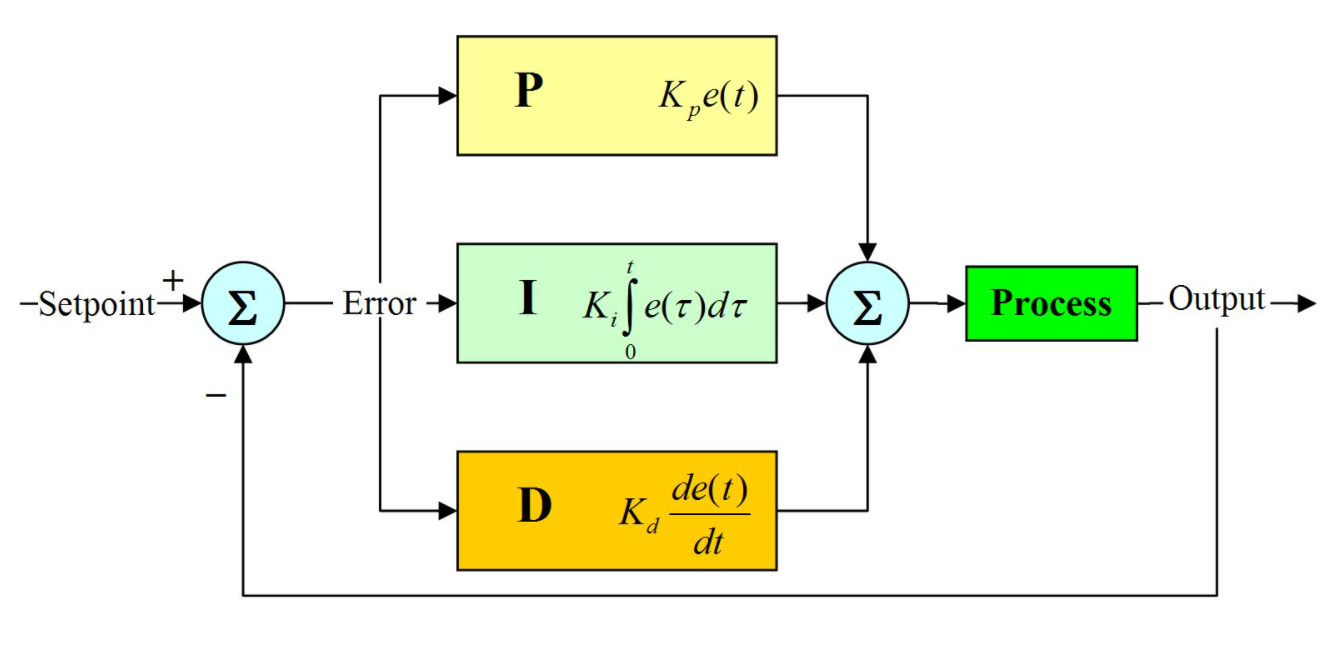
像PID控制器这样的闭环系统包括反馈控制系统。该系统使用固定点评估反馈变量以生成误差信号。在此基础上,它会改变系统输出。这个过程将一直持续到误差达到零,否则反馈变量的值就等于一个固定点。
与 ON/OFF 型控制器相比,该控制器提供了良好的结果。在 ON/OFF 型控制器中,只需获得两个条件即可管理系统。一旦过程值低于定点,则打开。同样,一旦该值高于固定值,它将关闭。这种控制器的输出不稳定,会在定点范围内频繁摆动。但是,与 ON/OFF 型控制器相比,该控制器更加稳定和准确。
PID控制器的工作
通过使用低成本的简单 ON-OFF 控制器,只有两种控制状态是可能的,例如完全 ON 或完全 OFF。它用于有限的控制应用,其中这两种控制状态足以满足控制目标。然而,这种控制的振荡性质限制了它的使用,因此它正在被 PID 控制器取代。
PID 控制器通过闭环操作保持输出,从而在过程变量和设定点/所需输出之间存在零误差。PID 使用下面解释的三种基本控制行为。
P-控制器
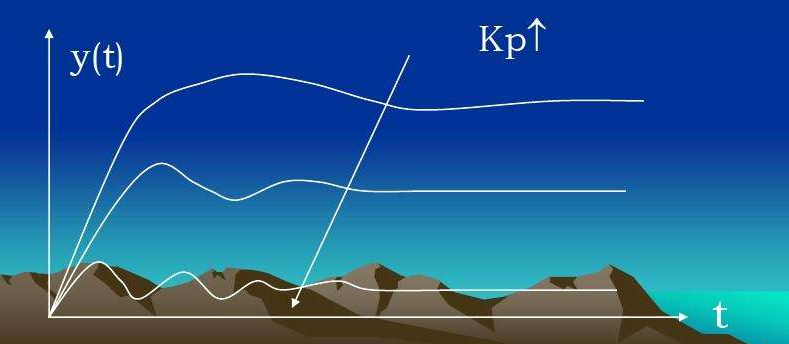
比例或 P 控制器给出与电流误差 e (t) 成比例的输出。它将期望值或设定值与实际值或反馈过程值进行比较。所得误差乘以比例常数以获得输出。如果错误值为零,则该控制器输出为零。
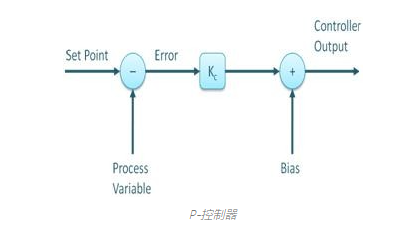
该控制器单独使用时需要偏置或手动复位。这是因为它永远不会达到稳态条件。它提供稳定的操作,但始终保持稳态误差。当比例常数 Kc 增加时,响应速度增加。
I-控制器
由于 p 控制器的限制,过程变量和设定值之间总是存在偏移,因此需要 I 控制器,它提供必要的动作来消除稳态误差。它在一段时间内对误差进行积分,直到误差值达到零。它保存误差为零的最终控制设备的值。
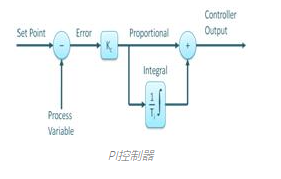
当出现负误差时,积分控制会降低其输出。它限制了响应速度,影响了系统的稳定性。通过降低积分增益 Ki 来提高响应速度。
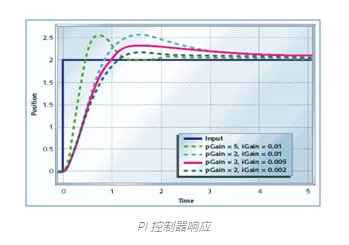
在上图中,随着 I 控制器增益的减小,稳态误差也不断减小。在大多数情况下,PI 控制器特别适用于不需要高速响应的情况。
在使用 PI 控制器时,I 控制器输出被限制在一定范围内,以克服积分结束条件,即使在零误差状态下积分输出也会继续增加,这是由于工厂中的非线性。
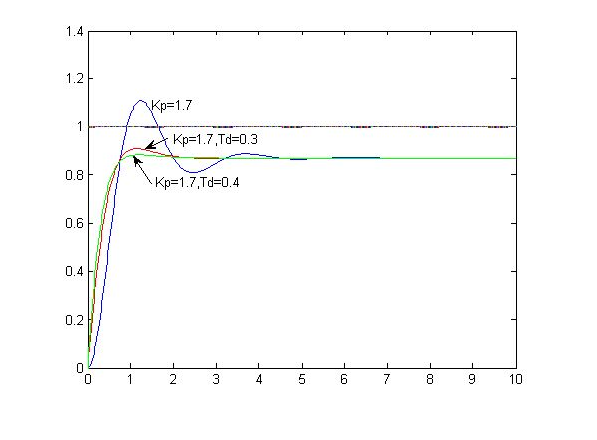
D-控制器
I-控制没有能力预测未来的错误行为。所以一旦设定点改变,它就会正常反应。D-控制通过预测错误的未来行为克服了这个问题。它的输出取决于误差随时间的变化率,乘以微分常数。它为输出提供了启动,从而增加了系统响应。
所以最后观察到,通过组合这三个控制器,我们可以获得系统所需的响应。不同的制造商设计了不同的PID算法。
PID控制器的类型
PID 控制器分为三种类型,如 ON/OFF、比例和标准型控制器。这些控制器都是基于控制系统使用的,用户可以使用控制器来调节方法。
开/关控制
开关控制方法是用于温度控制的最简单的设备类型。设备输出可以通过无中心状态打开/关闭。一旦温度超过固定点,该控制器将打开输出。限位控制器是一种特殊的开/关控制器,它使用闭锁继电器。该继电器手动复位,用于在达到特定温度后关闭方法。
比例控制
这种控制器旨在消除通过开/关控制连接的循环。一旦温度达到固定点,该 PID 控制器将减少向加热器提供的正常功率。
该控制器具有控制加热器的一项功能,使其不会超过固定点,但会达到固定点以保持稳定的温度。
这种比例行为可以通过在短时间内打开和关闭输出来实现。这种时间比例将改变从 ON 时间到 OFF 时间的比例,以控制温度。
标准型PID控制器
这种PID控制器将通过积分和微分控制合并比例控制,自动辅助机组补偿系统内的变化。这些修改、积分和导数以基于时间的单位表示。
这些控制器也通过它们的倒数、RATE 和 RESET 相应地引用。PID 的项必须单独调整,否则会根据试验和错误调整到特定系统。这些控制器将提供 3 种类型控制器中最精确和最稳定的控制。
实时 PID 控制器
目前,市场上有多种PID控制器可供选择。这些控制器用于工业控制要求,如压力、温度、液位和流量。一旦通过 PID 控制这些参数,选择包括使用单独的 PID 控制器或 PLC。
这些单独的控制器用于需要检查一个或两个回路的任何地方,以及在通过较大系统进入权利很复杂的情况下以其他方式进行控制。
这些控制设备为单回路和双回路控制提供了不同的选择。独立型 PID 控制器提供多种定点配置以产生自主的多种警报。
这些独立控制器主要包括霍尼韦尔的PID控制器、横河的温度控制器、OMEGA、西门子和ABB的自动调谐控制器。
在大多数工业控制应用中,PLC 就像 PID 控制器一样使用 PID 块的排列可以在 PAC 或 PLC 内完成,以便为精确的 PLC 控制提供更好的选择。与单独的控制器相比,这些控制器更智能也更强大。每个 PLC 都在软件编程中包含 PID 块。
调优方法
在 PID 控制器开始工作之前,必须对其进行调整以适应要控制的过程的动态。设计人员给出了 P、I 和 D 项的默认值,这些值无法提供所需的性能,有时会导致不稳定和控制性能变慢。开发了不同类型的调谐方法来调谐 PID 控制器,并且需要操作员非常注意选择比例、积分和微分增益的最佳值。其中一些在下面给出。
大多数工业应用中都使用 PID 控制器,但应该知道该控制器的设置,以正确调整它以生成首选输出。在这里,整定只不过是通过设置最佳比例增益、积分和微分因子从控制器接收理想回复的过程。
PID 控制器所需的输出可以通过调整控制器来获得。有不同的技术可用于从控制器获得所需的输出,如试错法、齐格勒-尼科尔斯和过程反应曲线。最常用的方法是试错法、Zeigler-Nichols 等。
试错法
这是一种简单的PID控制器整定方法。当系统或控制器工作时,我们可以调整控制器。在这种方法中,首先,我们必须将 Ki 和 Kd 值设置为零并增加比例项 (Kp),直到系统达到振荡行为。一旦振荡,调整 Ki(积分项),使振荡停止,最后调整 D 以获得快速响应。
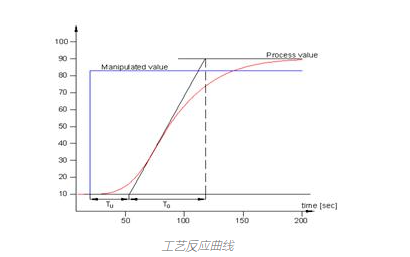
过程反应曲线技术
它是一种开环调谐技术。当阶跃输入应用于系统时,它会产生响应。最初,我们必须手动将一些控制输出应用到系统,并且必须记录响应曲线。
之后,我们需要计算曲线的斜率、死区时间、上升时间,最后将这些值代入 P、I 和 D 方程中以获得 PID 项的增益值。
Zeigler-Nichols 方法
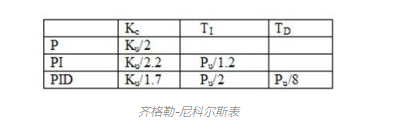
Zeigler-Nichols 提出了用于调整 PID 控制器的闭环方法。这些是连续循环法和阻尼振荡法。两种方法的程序相同,但振荡行为不同。在这里,首先,我们必须将 p 控制器常数 Kp 设置为特定值,而 Ki 和 Kd 值为零。增加比例增益,直到系统以恒定幅度振荡。
系统产生恒定振荡的增益称为最终增益 (Ku),振荡周期称为最终周期 (Pc)。一旦达到,我们可以通过 Zeigler-Nichols 表在 PID 控制器中输入 P、I 和 D 的值,具体取决于使用的控制器,如 P、PI 或 PID,如下所示。
PID控制器结构
PID 控制器由三项组成,即比例、积分和微分控制。这三个控制器的组合操作为过程控制提供了控制策略。PID 控制器控制过程变量,如压力、速度、温度、流量等。一些应用在级联网络中使用 PID 控制器,其中两个或多个 PID 用于实现控制。
上图显示了PID控制器的结构。它由一个 PID 块组成,该块将其输出提供给进程块。过程/工厂包括最终控制设备,如执行器、控制阀和其他控制设备,以控制工业/工厂的各种过程。
来自过程工厂的反馈信号与设定点或参考信号 u(t) 进行比较,并将相应的误差信号 e(t) 馈送到 PID 算法。根据算法中的比例、积分和微分控制计算,控制器产生组合响应或受控输出,应用于工厂控制设备。
所有控制应用程序都不需要所有三个控制元件。PI 和 PD 控制等组合在实际应用中经常使用。
应用
PID 控制器应用包括以下内容。
最好的 PID 控制器应用是温度控制,其中控制器使用温度传感器的输入,其输出可以与风扇或加热器等控制元件相关联。通常,该控制器只是温度控制系统中的一个元件。在选择正确的控制器时,必须检查和考虑整个系统。
炉温控制
通常,熔炉用于加热以及在高温下容纳大量原材料。被占据的材料通常包括巨大的质量。因此,它需要大量的惯性,即使施加大量热量,材料的温度也不会迅速改变。此功能可产生适度稳定的 PV 信号,并允许微分周期有效地纠正故障,而不会对 FCE 或 CO 发生极端变化。
MPPT充电控制器
光伏电池的 VI 特性主要取决于温度范围和辐照度。根据天气情况,电流和工作电压会不断变化。因此,追踪一个高效光伏系统的最高点就显得尤为重要。PID 控制器用于通过向 PID 控制器提供固定电压和电流点来找到 MPPT。一旦天气状况发生变化,跟踪器就会保持电流和电压稳定。
电力电子转换器
我们知道转换器是电力电子的一种应用,因此PID控制器主要用于转换器。每当转换器根据负载内的变化通过系统连接时,转换器的输出就会发生变化。例如,逆变器与负载相连;一旦负载增加,就会提供巨大的电流。因此,电压和电流的参数是不稳定的,但会根据需要而改变。
在此状态下,该控制器将产生 PWM 信号以激活逆变器的 IGBT。根据负载内的变化,将响应信号提供给 PID 控制器,使其产生 n 个错误。这些信号是基于故障信号生成的。在这种状态下,我们可以通过类似的逆变器获得可变的输入和输出。
PID 控制器接口
PID 控制器的设计和接口可以使用 Arduino 微控制器完成。在实验室中,使用Arduino UNO板、电子元件、热电冷却器设计基于Arduino的PID控制器,而本系统使用的软件编程语言为C或C++。该系统用于控制实验室内的温度。
特定控制器的 PID 参数是在物理上找到的。各种PID参数的作用可以通过不同形式控制器的后续对比来实现。
该接口系统可以通过±0.6℃的误差有效地计算温度,而通过与首选值的微小差异即可实现恒温调节。该系统中使用的概念将提供廉价且精确的技术来管理实验室内首选范围内的物理参数。
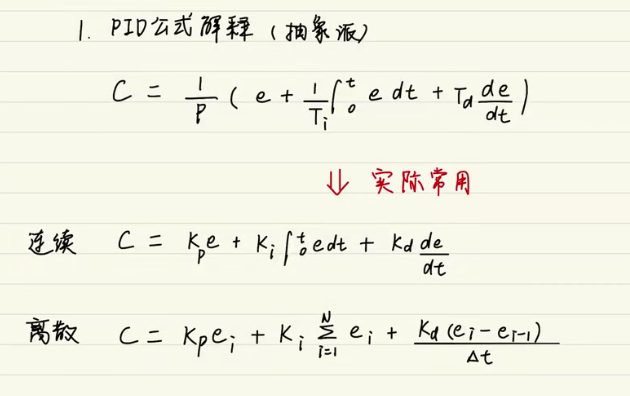
公式
最后
以上就是聪明过客最近收集整理的关于什么是 PID 控制器:工作原理及其应用什么是PID控制器?历史PID控制器框图PID控制器的工作PID控制器的类型调优方法PID控制器结构应用PID 控制器接口公式的全部内容,更多相关什么是内容请搜索靠谱客的其他文章。








发表评论 取消回复