本节我们讨论如何使用PD和PID控制器来实现机器人的位置点跟踪。对于不需要快速运动、尤其是具备较大减速比的减速箱关节的机器人,PD和PID控制器已经足够了。本节的分析着重工程学实际而不是严谨的数学推导。
根据上节的推导,我们有以下表达
其中θsk指电机输出轴(经过减速箱减速之后)的旋转角度,θmk指电机轴k的转动角度,rk指电机k的减速比,τk指连杆k的扭矩
已知机械操作手的动力学方程以及电机的动力学方程为

把第一个方程带入到第二个方程得到
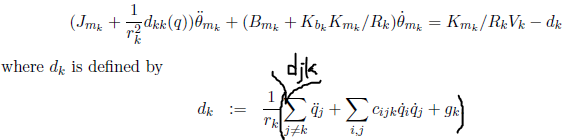
注意,这里的dk中间的j=k项被拆出来放到了方程左边(为什么要拆出来?而且移过去之后多了个平方是因为q的二次导变成θm的二次导时也要除一个rk)。可以发现第一项的系数不是关于q呈线性的关系。但是,如果减速比足够大的话,也就是rk足够大,那么加号后面的项的影响会变得足够小以至于可以忽略,因此我们定义Jeffk=
继续定义

那么原动力学方程变成

这个模型的优势就在于它的简单,可以被视为一个线性系统。非线性部分dk则可以被视为扰动,如果减速比较大而且关节速度加速度不大的话,这个扰动则可能会很小,这给机器人的控制带来了极大的方便。
基于以上假设和模型我们能够得到新的系统结构框图
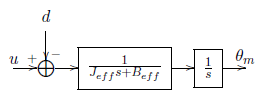
至此,复杂的机器人控制问题就被简化成如何跟踪一个θm的控制问题,动力学项d变成了扰动。这节告诉我们:只要你减速比够大,你连动力学公式都他妈不用推,直接PID就完事了。
最后
以上就是火星上日记本最近收集整理的关于《机器人动力学与控制》第十章——独立关节控制 10.3 位置点跟踪——介绍的全部内容,更多相关《机器人动力学与控制》第十章——独立关节控制内容请搜索靠谱客的其他文章。
本图文内容来源于网友提供,作为学习参考使用,或来自网络收集整理,版权属于原作者所有。








发表评论 取消回复